Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Power engineering wikipedia , lookup
Audio power wikipedia , lookup
Buck converter wikipedia , lookup
Phone connector (audio) wikipedia , lookup
Telecommunications engineering wikipedia , lookup
Alternating current wikipedia , lookup
Three-phase electric power wikipedia , lookup
Stepper motor wikipedia , lookup
Power over Ethernet wikipedia , lookup
Voltage optimisation wikipedia , lookup
Electrical connector wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Opto-isolator wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Rectiverter wikipedia , lookup
Mains electricity wikipedia , lookup
ATEX/IECEx Instructions
MODEL
XR47
Nidec-Avtron Makes the Most Reliable Encoders in the World
8 9 0 1 E . P L E A S A N T VA L L E Y R O A D • I N D E P E N D E N C E , O H I O 4 4 1 3 1 - 5 5 0 8
T E L E P H O N E : ( 1 ) 2 1 6 - 6 4 2 - 1 2 3 0 • FA X : ( 1 ) 2 1 6 - 6 4 2 - 6 0 3 7
E - M A I L : t a c h s @ n i d e c - a v t r o n . c o m • W E B : w w w. a v t r o n e n c o d e r s . c o m
DESCRIPTION
The Avtron XR47 is a hollow shaft severe duty incremental
encoder (also known as a tachometer or rotary pulse generator).
It provides a two phase, A Quad B frequency (pulse) output, with
complements.
CAUTION
The XR47 is designed for use in hazardous applications
which require protection from gas or dust ignition for safe
operation. Proper selection, wiring and installation procedures are essential to ensuring safe conditions.
When mounted to a machine shaft, the XR47 design eliminates
the need for shaft couplings, adapter flanges, or accessory
mounting faces. The high clamping-force collar holds the XR47 in
place, even under severe vibration & shock. A high-performance
composite shaft insert provides electrical isolation from motor
shaft currents. The shaft insert permits models to fit a range of
shaft sizes from 3/4” to 1 1/8” [19mm - 30mm]; additional sizes
available upon request. An anti-rotation arm prevents housing
rotation while allowing for shaft end float.
The XR47 features extreme shock and vibration resistance.
Combined with potted electronics and huge bearings, this creates our most rugged hollow shaft encoder for severe duty applications such as oil and gas drilling.
The XR47
– –has six signals: (A, B) 90° out of phase, –with complements (A, B). A marker pulse with complement (Z, Z ) is also
provided.
The XR47 has been evaluated to be compliant with IEC600790:2007, IEC60079-11:2011, EN60079-0:2009, EN60079-11:2012,
BSEN 61000-6-4:2007 and BSEN61000-6-2:2005 (Certificates of
conformity: TRAC12ATEX0002X, TRAC12ATEX 0003X, IECEx
TRC 12.0009X, and IECEx TRC12.0001X.)
THE XR47 IS CERTIFIED FOR USE IN:
Group II, Category 2 (ATEX/IECEx Zone 1), Gas Group IIC potentially
explosive atmospheres when marked CE 0539 Ex II 2 GD, Ex ib IIC
T4 Gb -40°C < Tamb < 80°C and used with an Avtron isolator marked
CE 0539 Ex [II 2 GD] [Ex ib IIC Gb] -40°C<Tamb<80°C.
Group II, Category 2 (ATEX/IECEx Zone 21), Dust Group IIIC
potentially explosive atmospheres when marked CE 0539 Ex
II 2 GD, Ex ib IIIC T200°CDb -40°C<Tamb<80°C and used with
an Avtron isolator marked CE 0539 Ex [II 2 GD] [Ex ib IIIC Db]
-40°C<Tamb<80°C .
Group II, Category 3 (ATEX/IECEx Zone 2), Gas Group IIC_*
potentially explosive atmospheres when marked CE Ex II 3 GD, Ex
ic IIC* T4 Gc -40°C<Tamb<80°C
*see chart in specification section and used with a power supply that limits
voltage and current per the chart in the specification section.
Group II, Category 3 (ATEX/IECEx Zone 22), Dust group IIIC
potentially explosive atmospheres when marked CE Ex II3 GD, Ex ic
IIIC T200°C Dc -40°C<Tamb<80°C.
*see chart in specification section and used with a power supply that
limits voltage and current per the chart in the specification section.
XR47
3/4-1 1/8” [19-30mm]
HOLLOW SHAFT FOR HAZARDOUS
APPLICATIONS
INSTALLATION
CAUTION
Be careful not to damage clamping fingers of hollow
shaft during handling. Do not tighten clamping collar
before installation onto motor shaft.
WARNING
Installation should be performed only by qualified
personnel. Safety precautions must be taken to ensure
machinery cannot rotate and all sources of power are
removed during installation.
For installations of Equipment Group II, Category 2
(ATEX/IECEx Zone 1), Gas group IIC, Dust group IIIC
(ATEX/IECEx Zone 21): Available as a system only including
XR47 with line driver option 5 and an Avtron Isolator module
XRB1 (P/N B35134).
System parameters are:
Um= 250V
Uo (open circuit voltage) = 7.14VDC max.
Io (short circuit current) = 420mA max.
Co (system capacitance) = 13.5uF max.
Lo (system inductance) = 0.15mH max.
Encoder parameters are:
Ui (input voltage) = 7.14VDC max.
Ii (fault current) = 420mA max.
Ci (internal capacitance) = 11.9uF max.
Li (internal inductance) = 0mH max.
The isolator XRB1 can be supplied as a separate module for
location in a safe area or in an explosion proof box on a short
flexible cable tethered to the encoder.
Equipment Group II, Category 3 (ATEX/IECEx Zone 2), Gas
group IIC, Dust group IIIC (ATEX/IECEx Zone 22): Requires
an XR47 with line driver option 7 and a SELV (Energy Limited)
or equivalent power supply which limits voltage and current to
the values in the table in the specifications. If current limit is
not inherent in the power supply a separate fuse between the
power supply and encoder can be used to limit current.
NOTE:
Isolators, encoders and cable must be selected and
installed in accordance with the latest edition of IEC/
EN60079-14 and IEC/EN60079-25. Cable characteristics must comply with IEC/EN60079-14 and IEC/
EN60079-25 and for zone 1 applications total system capacitance between the isolator and encoder
(including cable) must be less than Co-Ci. Total system inductance between the isolator and encoder
must be less than Lo-Li.
The equipment is intended for a fixed installation
and should be mounted so as to avoid electrostatic
charging. The XR47 is not considered as a safety
device and is not suitable for connection into a safety
system.
The XR47 construction materials contain less than 6% magnesium by mass. These materials are not considered as able to
trigger an explosion in normal operating modes in accordance
with the requirements for category 2 or 3 equipment. These
materials are not known to react with any explosive atmospheres to which the XR47 may be subject. It is however the
responsibility of the end user to ensure that the XR47 is selected correctly for the potentially explosive atmosphere in which
the equipment is to be put into service.
1
The XR47 installation is similar to XT45. Installation and
removal videos for the XT45 are available on Avtron’s web
site. Refer to the back page of these instructions for outline
and mounting dimensions. The motor must comply with 1998
NEMA MG 1, section 4, for tolerances on diameters and runout
for shafts and accessory faces.
In preparation for installing the Model XR47 encoder, it is first
necessary to clean the accessory motor shaft. The surface
must be inspected and any paint, burrs, or other surface imperfections removed.
Installation procedures should be performed only by qualified personnel. Safety precautions must be taken to ensure
machinery cannot rotate and all sources of power are removed
during installation.
Equipment needed for installation
Supplied:
XR47 Encoder
8b)For thru-shaft applications using the clamping collar system, remove the rear shaft cover, retain the (4x) M4 socket
head screw, and position the XR47 as required.
9) Tighten screws on clamping collar evenly until snug, then
tighten each screw to 95 in-lb [10.7 Nm]. DO NOT USE
A STANDARD RIGHT ANGLE WRENCH. Use only a
T-handle hex wrench or torque wrench with hex bit.
NOTE
To verify proper collar installation: check to ensure the
clamping collar compression washers are
completely flattened. For clamping collar installation,
proceed to step 10.
FOR FOR END OF SHAFT CENTER BOLT MOUNT
STYLE:
6. Using the bolt(s) and thread locker provided, mount the
30mm diameter stub shaft on the motor. Use dial indicator
to verify the stub shaft TIR <0.002” [0.05mm]
Optional:
Required for Zone 1/Zone 21: XRB1 Isolator
Anti-Rotation Arm Kit
7. Remove the sealing plug from the XR47.
Thread Locker (blue)
8. Carefully slide the encoder onto the shaft to verify fit.
Ensure a minimum of 0.050” [1mm] between encoder and
stub shaft surface. DO NOT FORCE. Encoder should slide
on easily. If the encoder does not fit easily, remove it, verify
shaft size, and check for burrs and shaft damage.
Not Supplied:
7/16”, 3/8” Wrenches
3mm, 5mm, 7/16” T-handle hex wrenches or torque wrench
with 3mm, 5mm, 7/16” bits (torque wrench required for
Center Bolt Mounting Style).
Dial Indicator Gauge
The hollow shaft XR47 design eliminates the potential for
bearing and coupling failures from misalignment, however,
excessive housing movement (wobble) may cause undesirable
vibrations. The higher the RPM, the more severe the vibration
will be from housing movement. In a typical installation a
housing movement of 0.007” TIR or less (as measured at the
outside diameter of the main encoder body) will not have an
adverse effect.
1) Disconnect power from equipment and encoder cable.
2) Use caliper gauge to verify motor shaft is proper diameter
and within allowable tolerances: +0.000”, -0.0005” [+0.00,
-0.013mm].
9. Insert center mounting screw (M8x1.0x35 with Belleville
washers provided) through the body of the encoder into the
stub shaft tapped hole and tighten to 424 in-lbs [48n-m]
9a.Replace rear sealing plug into XR47. Tighten to 150 in-lbs
[17n-m]
10)Attach free end of the anti-rotation arm to the bracket tether
using the shoulder bolt provided.
11)Secure free end of the anti-rotation bracket to frame using
bolt or T-bolt provided. Use additional washers as needed
to install the bracket. The bracket should be parallel to the
encoder face, 90 degrees to the shaft to avoid encoder
bearing damage.
12)Turn shaft by hand and verify the shaft turns freely and
does not produce excessive runout/wobble of the encoder
(<0.007” TIR [0.18mm], Total Indicated Runout.)
3) Clean machine shaft of any dirt and remove any burrs.
4) Use dial indicator gauge to verify the motor shaft: Total
Indicated Runout (TIR) <0.002” [0.05mm].
13)Connect cable as shown in wiring diagram.
14)Apply power to the encoder.
5) Install the anti-rotation bracket tether to the face of the
encoder using M5 Hex screws and lock washers, included
with the tether.
15)Rotate the shaft by hand, or using jog mode of the speed
controller and verify proper direction.
5a)(optional) For non-through-shaft (end of shaft) applications,
the optional rear cover may be installed for optimum
performance against dirt, liquid sprays and impacts.
FOR CLAMP COLLAR MOUNTING STYLE:
ENVIRONMENTAL CONSIDERATIONS
Special attention is to be given to conduit runs, interconnection
wiring and NEMA type enclosure mounting.
Follow these steps to reduce potential problems:
6) Loosen clamping collar screws.
1) Always mount connection points, conduit couplings, junction
boxes, etc., lower than actual encoder.
2) For washdown areas, shroud or otherwise cover the
encoder to prevent direct water spray. Do not attach the
shroud directly to the encoder.
NOTE
These screws have factory applied thread locker,
no further thread locker application is required.
7) Insert shaft sizing insert into encoder. DO NOT FORCE.
8) Test Fitting: carefully slide the encoder onto the shaft to verify
fit. Ensure a minimum of 1/8” [2mm] between encoder and
mounting surface. DO NOT FORCE. Encoder should slide on
easily. If the encoder does not fit easily, remove it, verify shaft
size, and check for burrs and shaft damage.
8a) For end of shaft applications using the clamping collar
system, place the XR47 2.75-3.31” [70-84mm] onto the shaft.
Ensure the stub shaft does not contact the optional rear cover
(remove cover if required).
XR47
REPAIRS
REMOVAL INSTRUCTIONS:
FOR CLAMPING COLLAR MOUNTING STYLE:
1. Unbolt tether arm from mounting point on motor.
2. Loosen both clamping collar screws.
3. Slide the encoder off the motor.
2
OR FOR END OF SHAFT CENTER BOLT MOUNTING STYLE:
1. Unbolt tether arm from mounting point on motor.
2. Unscrew & remove the sealing plug from the XR47.
3. Unscrew & remove the center mounting bolt.
4. Slide the encoder off the shaft.
5. (optional) If the encoder does not remove easily, do NOT force.
Instead, use the center bolt lifter method, detailed below:
Center Bolt Lifter Method (optional)
5a.Reinsert and loosely tighten the bolt through the encoder
body into the stub shaft.
5b.Loosen the reinserted bolt by approximately 5 turns. This will
leave the screw head approximately even with the bottom of
the seal plug hole threads.
5c.Reinsert and tighten the sealing plug cap. This will lift the
encoder by pushing on the head of the center mounting bolt.
The encoder should move axially ~0.2” [5mm]
5d.Check to see if the encoder can now be moved axially on
the shaft. If it can, remove the seal cap and center bolt and
remove the encoder.
5e.If the encoder cannot yet be moved by hand, repeat the
lifting cycle as needed: remove the cap, loosen the bolt
an additional ~5 turns, replace and retighten the cap, and
the encoder will move an additional 0.2” [5mm] for each
repetition.
There are no field replaceable parts in an XR47. The unit
should be returned to the factory for all repairs.
WIRING INSTRUCTIONS
CAUTION
Be sure to remove power before wiring the encoder.
Be sure to ground the cable shield: Avtron recommends
grounding the shield at the isolator module for Zone 1
applications or in the drive cabinet for Zone 2
applications. Cable should not be grounded multiple
places. An intrinsic safety ground is required at the
XRB1 Isolator Module.
CAUTION
SMARTSafe encoders include a local ground lug for
customer convenience and encoder frame grounding
if required to meet local electric code requirements or
site operator protection standards. This is NOT the
required XRB1 intrinsic safety ground connection
required for hazard protection against ignition of
explosive atmospheres!
Wiring diagrams are shown in the following pages.
Refer to the wiring diagrams and pinout and phasing tables for
specific information on each option.
CAUTION
CORRECTIVE ACTION FOR PHASE REVERSAL
1) Remove Power.
2) Exchange wires on cable, either at encoder cable end, or
at speed controller end (but not both).
a)
Single Ended 2 Phase Wiring (see wiring diagram)
Exchange A and B at the use end of the wires.
b)
Differential 2 Phase Wiring (see wiring diagram)
–
Exchange either A with A in the phase A pair OR B
–
with B in the phase B pair but NOT both.
3) Apply Power.
4) Verify encoder feedback is correct, using hand rotation of
shaft, or jog mode of the speed controller.
Interconnecting cables specified in the wire selection chart are
based on typical applications. Cable must be selected and installed
in accordance with IEC/EN60079-14 and IEC/EN60079-25. Physical
properties of cable such as abrasion, temperature, tensile strength,
solvents, etc., are dictated by the specific application. General
electrical requirements are: stranded copper, 20 through 16 AWG
(Industrial EPIC connector type options can use 14 AWG). Each twisted
wire pairs overall shielded with braid or foil with drain wire, .05 uf of
maximum total mutual or direct capacitance, outer sheath insulator.
See specifications for maximum cable length. Stranded 20 AWG wire
should not be used for cable runs greater then 61 meters. If 20 AWG
is used with EPIC type connector (zone 2 configurations only) options
the wire ends should be tinned.
FAULT-CHECK
After power-up and the rotor position is checked by the sensor, the
Fault-Check LED will turn green.
If the adaptive electronics reach their adjustment limit for any reason,
the Fault-Check alarm and LED will notify the drive and operator of
an impending failure. The LED will turn red if the Adaptive Electronics
reach their adjustment limit. This output occurs before an actual
failure, allowing steps to be taken to replace the unit before it causes
unscheduled downtime. Fault-Check annunciation is available as an
“alarm” output through the connector (zone 2 configurations only)
and as an integral LED.
TROUBLESHOOTING
If the drive indicates a loss of encoder/tach fault and the XR47 faultcheck LED is not illuminated, check the encoder power supply. If
power is present, check polarity; one indicator of reversed power
supply is that all outputs will be high at the same time. If the drive
indicates encoder fault, but the LED shows GREEN, then check the
wiring between the drive and the encoder. If the wiring appears
correct and in good shape, test the wiring by replacing the XR4F.
If the new unit shows GREEN, and the drive still shows encoder
loss/tach fault, then the wiring is faulty and should be repaired or
replaced.
If the alarm output and/or LED indicate a fault (RED) on a properly
mounted XR4F and the rotor is properly located, replace the XR47
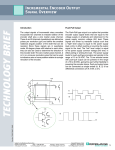
An oscilloscope can also be used to verify proper output of the XR47
encoder at the encoder connector itself and at the drive/controller
cabinet. If the outputs show large variations in the signals at steady
speed (jitter or “accordion effect”, see figure below), replace any
magnetized material nearby with non-magnetic material (aluminum,
stainless) (shafts, etc). If variations persist, consider replacing with
super-shielded models, option -004.
Zone 1 and Zone 21 applications utilize the XRB1
isolator which requires an intrinsic safety ground to
provide hazard protection. Failure to connect this
ground, or providing an inadequate safety ground
path could result in an spark/ignition hazard which
can result in property damage, injury, or even death.
PHASE A
PHASE B
For bidirectional operation of the XR47, proper phasing of the two
output channels is important. Phase A channel typically leads Phase
B channel for clockwise shaft rotation as viewed from the anti-drive
or accessory end of the motor (XR47 mounting end).See pinout and
phasing tables for exceptions.
XR47
VARIATION > ± 15%
3
XR47 PART NUMBERS AND AVAILABLE OPTIONS
Model
XR47
Bore Size
Clamping
Collar Mount
U.S.
D-3/4"
E-7/8"
F-1"
G- 1 1/8"
Clamping
Collar Mount
Metric
L-20mm
M-25mm
N-30mm
End of Shaft:
Center Bolt
Mount*
J-30mm*
(no stub)
K- fits GE B20
(stub shaft
included)
Left Output
PPR
AF-60
AG-100
AH-120
AA-128
AL-240
AN-256
AE-360
AQ-500
AR-512
AS-600
AV-900
Right Output
Line Driver Connector Options
PPR
AJ-960
XX-None
AW-1000
AY-1024
AZ-1200
A3-2000
A4-2048
A5-2500
AD-4096
A8-4800
A9-5000
5- Zone 1 & 21
(5-7V in
5V out)
For use with
XRB1 isolator
12-24V In
10.6V Out
Tether
Channels
Zone 1 & 21
X-None
A-All
Remote Protection &
G-Torque arm
Zone 2 & 22
W-18" flex cable
Y- 10 pin MS with plug
on 12" cable
Z- 3’ Flex cable w/surface
mount Industrial and 7-Zone 2 & 22 Plug
5-24 V in,
5-24 V out
* 30mm x 25mm stub shaft
required for mounting
XR47
4
Modifications
000-None
001- Omit Rear
Shaft Cover
9xx-Specify cable
length xx=feet (use
w/ Option “W”)
018-Includes
Isolator
SPECIFICATIONS
ELECTRICAL SPECIFICATIONS
A.Operating Power (Vin)
1.Volts............................. See Line Driver Options
2.Current (No Load)
Encoder....................... 100mA
Encoder + Isolator....... 150mA
B.Output Format
–
–
1.2O// & Comp................. A,A, B,B (differential line driver)
–
2. Marker:........................ 1/Rev Z, Z
C.Signal Type...................... Incremental, Square Wave, 50 +/-10% .................................... Duty Cycle.
D.Direction Sensing............ O/A leads O/ B for CW rotation as viewed
.................................... from the back of the tach looking at the
.................................... non-drive end of the motor.
E.Transition Sep................. 15% minimum
F. Frequency Range............ 0 to 165,000 Hz
G.PPR................................. 8-5000
H.Line Driver Specs:........... See table
Electrical Specifications
MECHANICAL
ENVIRONMENTAL
Ui
250mA
IIC
IIB
15V
25V
1A
15V
5A
12V
CI
1.8uf
Zone 2 Power Supply Limits
Parameter
Isolator
Um
250V
-
Ui
-
7.14V
Li
-
440mA
-
0.4W
Ci
-
11.9UF
Li
-
0mH
Uo
7.14V
-
Io
440mA
-
Po
0.4W
-
Lo
1.5mH
Co
13.5uF
Lo/Ro
-
VDC
5
VDC
5-24
Line Driver
7272
(5-7 to Encoder)
10.6 Output Signals
IXDF604
7272
Output Resistance Typ
13
3
13
ohms
Maximum Peak Current
1500
3000
1500
mA
Maximum Average
Current
120
350
120
mA
Voh Typ
VIN-1
10.6
VIN-1
VDC
Vol Typ
0.5
0.4
0.5
VDC
500’ @ 5-12V
200’ @ 24V
1000’
500’
feet
yes
yes
yes
yes
yes
yes
yes
yes
yes
Cable Drive Capacity
Reverse
Voltage
Alarm
+V(out)*
Output voltage equal to input voltage.
Alarm*
Open collector, normally off, goes low on alarm,
sink 100mA max, 50VDC max
LED
Marker
Green=power on, Red=Alarm
One per revolution. Pulse width
approximately 1/128 of a revolution
*Alarm not available with the following; line driver option 5 from isolator XRB1, connector
option “G” (NorthstarTM compatible pinout), “R” and “S”
Zone 1 Table of entity parameters
XR47
5-7
Nom Output Voltage
Encoder
Pi
Units
12-24
Solid cast aluminum stator and rotor. Less than 6% magnesium by
mass. Fully potted electronics, protected against oil and water spray
Non-contacting labyrinth seal provided.
Operating Temperature:.......-40°C to +80°C.
Ii
5
5-24
Transient
A.Shaft Inertia..................... 0.0041lb-in-sec2
B.Acceleration..................... 5000 RPM/Sec. Max.
C.Speed:............................. 5000 RPM Max.
D.Weight:............................ 5-6 lbs [2.2-2.7 kg.]
E.Vibration.......................... 20 Gs, 5-2000 Hz (any orientation)
F.Shock.............................. 300 Gs, any orientation
G. Shaft Engagement (clamp style)
All sizes...................2.75” [70mm]
Isolator XRB1
Input Voltage
Protection Short
Circuit
I.Connectors:..................... See connector options
LINE DRIVER OPTIONS
7
5
XR47
Application Examples
Applies to all Model XR47 Encoders Zone 2 & 22 models, except wiring option “Y”. Remote Alarm not available for Zone 1 &
Zone 21.
ALARM OUTPUT CONNECTION
Avtron XR47 encoders provide an alarm signal if maintenance is required under specific circumstances. Following are application
examples provided to help install the alarm output.
Example 1. Alarm output using +V(OUT). +V(OUT) is equal to +V, the encoder power supply.
ENCODER
OUTPUT OPTIONS
FUNCTIONAL DIAGRAM
“W”
{
CR8
LINE
DRIVER
NOTE 1
BLACK
RED
“4”
“P”, “Z”
“H”, “L”
“2”
A
1
6
COM
10
12
D
2
7
3
8
4
9
A
Z
8
1
5
6
3
4
B
GREEN
YELLOW
G
GRAY
H
WHITE
I
BLUE
E
ORANGE
C
+V
A
B
B
Z
BROWN
F
5
+V(OUT)
2
VIOLET
J
10
ALM
7
FUNCTION
COMMON
+V (Encoder Power)
ØA
ØA
ØB
ØB
MARKER
MARKER COMPLEMENT
50mA MAX
300 OHM
MIN.
Q5
Vcc
GND
MMFT6661
OUT
COM
SOLID STATE RELAY
Example 2. Alarm Output Using Separate 24 VDC Power Supply and Relay.
ENCODER
OUTPUT OPTIONS
FUNCTIONAL DIAGRAM
CR8
LINE
DRIVER
NOTE 1
{
FUNCTION
“W”
“4”
“P”,“Z”
“H”,“L”
“2”
BLACK
A
1
6
COM
10
12
GREEN
D
A
B
B
+V(OUT)
RED
B
WHITE
C
I
2
7
3
8
4
9
BROWN
F
5
VIOLET
J
YELLOW
BLUE
GRAY
ORANGE
G
E
H
10
+V
A
Z
Z
ALM
COMMON
+V (Encoder Power)
ØA
8
1
5
6
3
4
ØA
ØB
ØB
-
*
POWER
SUPPLY VDC
*See note below +
MARKER
MARKER COMPLEMENT
115 VAC
300 OHM
MIN.
2
OUT
7
COM
SOLID STATE RELAY
Q5
GND
MMFT6661
SINK 100 mA MAXIMUM
*See specifications for Zone 2
Power supply limits
XR47
Vcc
6
WIRING DIAGRAMS
WIRING
DIAGRAMS
ZONE 1 HAZARDOUS AREA
“REMOTE PROTECTION’
A
A
B
B
Z
Z
A
A
B
B
Z
Z
12-24
Volts In
+
5-7 Volts
Out
AA+
BB+
ZZ+
ENCODER
18AWG, 4 Twisted Pair + Overall Shield
Belden P/N 9554 or Alpha P/N 2244C Typ
See Attached for Connector
Option Pin Outs
XR47
7
K2- 2K2+ 2+
K0K0+
- GND
+ Ub+
gnd gnd
Typical Cable 500'(150M)max
K1- 1K1+ 1+
Intrinsic Safety Gnd
00+
0V
+E
Customer Equipment
2 Phase Differential
+
ISOLATOR
P/N B35134
SAFE AREA
12-24
Volts Out
WIRING DIAGRAMS
ZONE 2 HAZARDOUS AREA
DIFFERENTIAL 2 PHASE WIRING
AA+
BB+
ZZ+
K1- 1K1+ 1+
K2- 2K2+ 2+
K0K0+
- GND
+ Ub+
Twisted Pair + Overall Shield
Belden
9552
9553
9554
1328A
ZONE 2 HAZARDOUS AREA
SINGLE ENDED 2 PHASE WIRING
Alpha
2242C
2243C
2244C
2245C
SAFE AREA
- GND 0V
A+ K1+ 1+
+ Ub+ +E
B+ K2+ 2+
Z+ K0+ 0+
+v
alm
Typical Cable 500'(150M)max
18AWG,
ENCODER LINE
DRIVER OPTION 7
See Attached for Connector
Option Pin Outs
Twisted Pair + Overall Shield
2 Pair
3 Pair
4 Pair
5 Pair
ZONE 2 HAZARDOUS AREA
SINGLE ENDED 1 PHASE WIRING
Belden
9552
9553
9554
1328A
*
5-24
Volts Out
Customer
Equipment
18AWG,
ENCODER LINE
DRIVER OPTION 7
See Attached for Connector
Option Pin Outs
2 Pair
3 Pair
4 Pair
5 Pair
*
5-24
Volts Out
Alpha
2242C
2243C
2244C
2245C
SAFE AREA
A+ K1+ 1+
+ Ub+ +E
- GND 0V
Customer
Equipment
Typical Cable 500'(150M)max
00+
0V
+E
Customer Equipment
2 Phase Differential
SAFE AREA
*
5-24
Volts Out
Typical Cable 500'(150M)max
ENCODER LINE
DRIVER OPTION 7
See Attached for Connector
Option Pin Outs
18AWG, Triad + Overall Shield
Belden Alpha
3 Conductor 9365 M9628010
* SEE SPECIFICATIONS FOR ZONE 2
POWER SUPPLY LIMITATIONS
Refer to Installation and Specification Sections for Requirements and Limitations
XR47
8
PINOUTS AND PHASING
Phasing is defined as the direcon of
rotaon for which phase A leads B as
viewed from the back of the Encoder
10 Pin MS AvtronPinout
10 Pin, Industrial, Avtron Pinout
10 Wire Cable
Opon
Code
Y
Z
W
Channel
Phasing
Code
A
CW
A
CW
A
CW
XR47
Signal
Pin #
Pin #
Color
9
0V
Gnd A+ B+ Z+ Alm+ +Vin A- B- Z- Alm
F
A
B
C
E
D
H
I
J
G
1
2
3
4
5
6
7
8
9
10
BLK GRN BLU ORG BRN RED YEL GRA WHT VIO
OUTLINE DRAWING
SHAFT ENGAGEMENT:
Minimum: 2.75 [70mm]
Maximum (With Cover): 3.31[84mm]
Features and specifications subject to change without notice.
Avtron standard warranty applies. All dimensions are in inches [mm].
These instructions have been reviewed and the product evaluated as suitable for our application.
Company Name
Authorized Company Representative
Title
Date
Features and specifications subject to change without notice.
Avtron standard warranty applies. All dimensions are in millimeters approx.
ENCODERS
8901 E. PLEASANT VALLEY RD., INDEPENDENCE, OH 44131, U.S.A.
(1) 216-642-1230 • FAX (1) 216-642-6037 • www.avtronencoders.com
XR47
10
REV: 09/12/13