Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Pulse-width modulation wikipedia , lookup
PID controller wikipedia , lookup
Audio power wikipedia , lookup
Distributed control system wikipedia , lookup
Opto-isolator wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Electric power system wikipedia , lookup
Electrification wikipedia , lookup
History of electric power transmission wikipedia , lookup
Power electronics wikipedia , lookup
Alternating current wikipedia , lookup
Electronic engineering wikipedia , lookup
Resilient control systems wikipedia , lookup
Mains electricity wikipedia , lookup
Rectiverter wikipedia , lookup
Power engineering wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Distribution management system wikipedia , lookup
Public address system wikipedia , lookup
Wassim Michael Haddad wikipedia , lookup
Control theory wikipedia , lookup
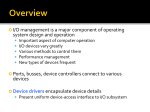
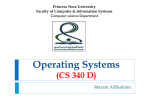
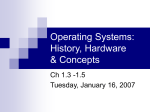
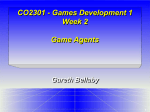
Advances in Natural and Applied Sciences, 8(8) July 2014, Pages: 196-200 AENSI Journals Advances in Natural and Applied Sciences ISSN:1995-0772 EISSN: 1998-1090 Journal home page: www.aensiweb.com/ANAS Power System Stabilizer Design based on the Full State Feedback Method Reza Saki, Somayeh Yarahmadi, Faranak Nikabadi, Vahid Chegeni Department of Electrical Engineering, Doroud Branch, Islamic Azad University, Doroud, Iran ARTICLE INFO Article history: Received 25 January 2014 Received in revised form 12 March 2014 Accepted 14 April 2014 Available online 5 May 2014 ABSTRACT Full state feedback is a suitable method to place the closed-loop poles of a plant in predetermined locations in the s-plane. This method can be used to replace the power system Eigen-values and enhancing system stability. This paper presents the state feedback method to design power system stabilizer (PSS). The simulations results are carried out based on the typical power system. Nonlinear simulations are used to denote the effectiveness of the proposed method. Keywords: Full State Feedback Power System Stabilizer Stability Eigen-Values © 2014 AENSI Publisher All rights reserved. To Cite This Article: Reza Saki, Somayeh Yarahmadi, Faranak Nikabadi, Vahid Chegeni, Power system stabilizer design based on the full state feedback method. Adv. in Nat. Appl. Sci., 8(8): 196-200, 2014 INTRODUCTION Theory is a method employed in feedback control system theory to place the closed-loop poles of a plant in pre-determined locations in the s-plane. This method has been used in electric power system for different purposes (El-Sherbiny et al., 1996; Bettayeb and Randhawa, 1999; Lin and Wu, 2011; Li et al., 2012; Mahmud et al., 2014; Schuler et al., 2014). Paper (Mahmud et al., 2014) presents an approach to design a nonlinear observer-based excitation controller for multi-machine power systems to enhance the transient stability. The controller is designed based on the partial feedback linearization of a nonlinear power system model, which transforms the model into a reduced-order linear one with an autonomous dynamical part. Then a linear state feedback stabilizing controller is designed for the reduced-order linear power system model using optimal control theory which enhances the stability of the entire system. The states of the feedback stabilizing controller are obtained from the nonlinear observer and the performance of this observer-based controller is independent of the operating points of power systems. The performance of the proposed observer-based controller is compared to that of an exact feedback linearizing observer-based controller and a partial feedback linearizing controller without observer under different operating conditions. Paper (Lin and Wu, 2011) investigates global complete synchronization of two identical power systems and global robust synchronization of two power systems with parameter mismatch and external disturbance, both under the master–slave linear state-error feedback control. Some criteria for achieving the synchronization via a single-variable linear coupling are derived and formulated in simple algebraic inequalities. These algebraic criteria are further optimized so as to improve their performances. The effectiveness of the new algebraic criteria is illustrated by the numerical examples. Paper (Bettayeb and Randhawa, 1999) presents the incorporation of time-weighted linear quadratic regulator (TWLQR) state and output feedback control for power system dynamic stability problems. The effectiveness of the TWLQR control is shown for a single machine infinite bus (SMIB) system. The simulation results show that the TWLQR control is superior to linear quadratic regulator (LQR) control for both state and output feedback cases. Paper (Schuler et al., 2014) considers the problem of constructing decentralized state feedback controllers for linear continuous-time systems. Different from existing approaches, where the topology of the controller is fixed a priori , the topology of the controller is part of the optimization problem. Structure optimization is done in terms of a minimization of the required feedback links and subject to a predefined bound on the tolerable loss of the achieved H∞H∞-performance of the decentralized controller compared to an H∞H∞-optimal centralized controller. We develop a computationally efficient formulation of the decentralized control problem by convex relaxations which makes it attractive for practical applications. The proposed design algorithm is applied to design sparse wide area control of a 3-area, 6-machine power system. Corresponding Author: Reza Saki, Islamic Azad University, Department of Electrical Engineering, Doroud, Iran. E-mail: [email protected] 197 Reza Saki et al, 2014 Advances in Natural and Applied Sciences, 8(8) July 2014, Pages: 196-200 This paper presents the state feedback method to design power system stabilizer (PSS). The simulations results are carried out based on the typical power system. Nonlinear simulations are used to denote the effectiveness of the proposed method. State feedback: The state of a dynamical system is a collection of variables that permits prediction of the future development of a system. We now explore the idea of designing the dynamics a system through feedback of the state. We will assume that the system to be controlled is described by a linear state model and has a single input. The feedback control will be developed step by step using one single idea: the positioning of closed loop eigenvalues in desired locations. Figure 1 shows a diagram of a typical control system using state feedback. The full system consists of the process dynamics, which we take to be linear, the controller elements, K and kr , the reference input, r, and processes disturbances, d. The goal of the feedback controller is to regulate the output of the system, y, such that it tracks the reference input in the presence of disturbances and also uncertainty in the process dynamics. An important element of the control design is the performance specification. The simplest performance specification is that of stability: in the absence of any disturbances, we would like the equilibrium point of the system to be asymptotically stable. More sophisticated performance specifications typically involve giving desired properties of the step or frequency response of the system, such as specifying the desired rise time, overshoot and settling time of the step response. Finally, we are often concerned with the disturbance rejection properties of the system: to what extent can we tolerate disturbance inputs d and still hold the output y near the desired value (Aström and Murray, 2010). Fig. 1: A feedback control system with state feedback (Aström and Murray, 2010). State feedback theory or pole placement, is a method employed in feedback control system theory to place the closed-loop poles of a plant in pre-determined locations in the s-plane. Placing poles is desirable because the location of the poles corresponds directly to the Eigen-values of the system, which control the characteristics of the response of the system. The system must be considered controllable in order to implement this method. The state space model of system can be represented as (1) and then, the poles of the system are the roots of the characteristic equation given by (2). x A x Bu y C x Du sI A 0 Full state feedback is utilized by commanding the input vector u as (3). u K x (1) (2) (3) Eventually, the state space equations can be derived as follows; x A BK x y C DK x (4) The roots of the state feedback system are given by the characteristic equation as follows: det sI A BK (5) Comparing the terms of this equation with those of the desired characteristic equation yields the values of the feedback matrix K which force the closed-loop eigenvalues to the pole locations specified by the desired characteristic equation. 198 Reza Saki et al, 2014 Advances in Natural and Applied Sciences, 8(8) July 2014, Pages: 196-200 Test System: A single machine power system which is installed with a infinite bus is chosen as case study. Figure 2 shows the test system with two areas and interconnection lines. The system is taken from (El-Sherbiny et al., 1996). Simulation Results: The proposed state feedback in section 2 is designed. The output signal Δω is assumed as input of feedback and ΔVref is considered as output of state feedback. The feedback gain is obtained as 4.21. In order to show the ability of this method to damp out the oscillations, two operating conditions are considered as follows: Nominal operating condition: No changing the parameters Heavy operating condition: 20 % increasing load Figures 3 to 7 show the generator speed following 6 cycles three phase short circuit at bus 1. The results show the PSS can enhance the system stability and damp out the oscillations. In addition, along with increasing load, the oscillation become larger and the most oscillations are seen under heavy loading condition. Figure 4 shows the rotor angle and it is clear that fault is occurred at second 1 and after 6-cycles is removed. The rotor angle oscillations show that system become stable after 15 seconds. Voltage of bus 1 and its angle are depicted in Figures 5 and 6. The oscillations of these parameters are also damp out after few seconds. Figure 7 shows the generator speed under heavy loading condition and the oscillations are significantly increased in comparison with the nominal condition. Bus 1 Transformator Infinite Bus Bus 2 Bus 3 G Load Fig. 2: single line diagram of power system. 1.0008 1.0006 Speed G (p.u.) 1.0004 1.0002 1 0.9998 0.9996 0.9994 0 5 10 Time (s) 15 20 Fig. 3: Gnerator speed at nominal operating condition. 1.24 1.235 Rotor angle (Rad) 1.23 1.225 1.22 1.215 1.21 1.205 1.2 1.195 0 5 Fig. 4: Rotor angle at nominal operating condition. 10 Time (s) 15 20 199 Reza Saki et al, 2014 Advances in Natural and Applied Sciences, 8(8) July 2014, Pages: 196-200 0.505 Angle of voltage at bus 1 (Rad) 0.5 0.495 0.49 0.485 0.48 0.475 0.47 0 5 10 Time (s) 15 20 Fig. 5: Angle of voltage at bus 1 at nominal operating condition. 1.015 Voltage of bus 1 (Rad) 1.01 1.005 1 0.995 0.99 0.985 0 5 10 Time (s) 15 20 10 Time (s) 15 20 Fig. 6: Voltage of bus 1 at nominal operating condition. 1.0008 1.0006 Speed G (p.u.) 1.0004 1.0002 1 0.9998 0.9996 0.9994 0 5 Fig. 7: Generator speed at heavy operating condition. Conclusions: This paper presented a new state feedback to design power system stabilizer at a two-area interconnected power system. The proposed system was installed with a infinite bus. Two operating conditions were considered to study the performance of the system under uncertainty. Simulation results demonstrated that the proposed PSS is very effective to damp out the oscillations. 200 Reza Saki et al, 2014 Advances in Natural and Applied Sciences, 8(8) July 2014, Pages: 196-200 REFERENCES Aström, K.J. and R. M. Murray, 2010. Feedback systems: an introduction for scientists and engineers: Princeton university press. Bettayeb, M. and A.Q. Randhawa, 1999. “Time-weighted optimal state and output feedback control of power systems,” Electric Power Systems Research, 52(1): 77-86, 10/1/. El-Sherbiny, M.K., A.M. Sharaf, G. El-Saady, 1996. “A novel fuzzy state feedback controller for power system stabilization,” Electric Power Systems Research, 39(1): 61-65, 10//,. Li, W., X. Liu, and S. Zhang, 2012. “Further results on adaptive state-feedback stabilization for stochastic high-order nonlinear systems,” Automatica, 48(8): 1667-1675, 8//. Lin, Q. and X. Wu, 2011. “The sufficient criteria for global synchronization of chaotic power systems under linear state-error feedback control,” Nonlinear Analysis: Real World Applications, 12(3): 1500-1509, 6//. Mahmud,M.A., M.J. Hossain and H.R. Pota, 2014. “Transient stability enhancement of multimachine power systems using nonlinear observer-based excitation controller,” International Journal of Electrical Power & Energy Systems, 58(0): 57-63, 6//. Schuler, S., U. Münz, and F. Allgöwer, 2014. “Decentralized state feedback control for interconnected systems with application to power systems,” Journal of Process Control, 24(2): 379-388, 2//.