Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Software Tools for Technology Transfer manuscript No.
(will be inserted by the editor)
Closed-loop Verification of Medical Devices with Model
Abstraction and Refinement?
Zhihao Jiang, Miroslav Pajic, Rajeev Alur and Rahul Mangharam
University of Pennsylvania, Philadelphia PA, USA
Received: date / Revised version: date
Abstract. The design and implementation of software
for medical devices is challenging due to the closed-loop
interaction with the patient, which is a stochastic physical environment. The safety-critical nature and the lack
of existing industry standards for verification, make this
an ideal domain for exploring applications of formal modeling and closed-loop analysis. The biggest challenge is
that the environment model(s) have to be both complex
enough to express the physiological requirements, and
general enough to cover all possible inputs to the device. In this effort, we use a dual chamber implantable
pacemaker as a case study to demonstrate verification
of software specifications of medical devices as timedautomata models in UPPAAL. The pacemaker model
is based on the specifications and algorithm descriptions from Boston Scientific. The heart is modeled using
timed automata based on the physiology of heart. The
model is gradually abstracted with timed simulation to
preserve properties. A manual Counter-Example-Guided
Abstraction and Refinement (CEGAR) framework has
been adapted to refine the heart model when spurious
counter-examples are found. To demonstrate the closedloop nature of the problem and heart model refinement,
we investigated two clinical cases of Pacemaker Mediated
Tachycardia and verified their corresponding correction
algorithms in the pacemaker. Along with our tools for
code generation from UPPAAL models, this effort enables model-driven design and certification of software
for medical devices.
Key words: Medical Devices, Implantable Pacemaker,
Software Verification, Cyber-Physical Systems, Model
Abstraction and Refinement, CEGAR
? This research was partially supported by NSF research
grants MRI 0923518, CAREER 1253842, CNS 1035715 and CCF
0915777.
1 Introduction
Over the past four decades, cardiac rhythm management
devices such as pacemakers have expanded their role
from “keeping the patient alive” to “improving the quality of the patient’s life”. The addition of more safety and
efficacy features has resulted in increased complexity, inevitably leading to more potential safety issues. From
1996-2006, the percentage of software-related causes in
medical device recalls have grown from 10% to 21% [1].
During the first half of 2010, the US Food and Drug Administration (FDA) issued 23 recalls of defective devices,
all of which are categorized as Class I, meaning there is
a “reasonable probability that use of these products will
cause serious adverse health consequences or death.” At
least six of the recalls were caused by software defects [2].
Medical devices, such as the implantable cardiac pacemaker, are perfect examples of Cyber-Physical Systems
(CPS), in which the controller (the pacemaker) actively
interacts with a stochastic plant (the heart). While in
other CPS domains like the aviation and automotive industries, standards are enforced during software development, manufacturing, and post-market change [3, 4],
there are no well-established standards or tools for development of software for medical devices. One reason is
because the software design in medical device industry is
different from other industries. With physiological control systems, the is a large degree of uncertainty in the
model of the organ and physiological process. The modes
of operation vary across the population of patients, level
of activities, metabolic rates, and so on. Thus, the safety
and efficacy of the device should be evaluated in closedloop based on the well-being of the patient, which relies
on extensive domain knowledge on the physical environment. In model-based design, this unique feature results
in two contradictory requirements on the environment
model.
2
Zhihao Jiang et al.: Pacemaker Verification
a
Domain
Expert
Safety/Efficacy
Requirements
Safety/Efficacy
properties
Software
Engineer
Software
specifications
System
model
Model Checking
Environment
model
Test
Generation
Electrical
engineer
Implementation
Test Cases
Conformance Testing
b
Fig. 1. a. Traditional real-time software development process;
b. model-based design framework
1. The environment model has to be complex
enough
Since the safety properties are specified based on the patient conditions, the environment model has to be able
to represent specific patient conditions and condition
groups, regardless of the capability of the device. When
a certain algorithm is targeting a very specific patient
condition, the environment model should be complex
enough to distinguish that particular patient condition
from other conditions.
2. The environment model has to be general
enough
Unlike products in other industries, most medical device
products have to be able to deal with large variety of
environmental conditions. Thus the environment model
used during safety evaluation has to be general enough
to cover all possible scenarios.
The more complex the environment model is, there
are usually more constraints on model outputs, which
then reduce the coverage for the input to the device. It
is contradictory that a single model can be both general
and complex. One possible solution is to use multiple
models with different complexity. When different models are used to prove different properties, we have to
make sure that the models have certain relations so that
properties verified with one model are preserved when
we use other models.
1.1 Model-based Software Design Framework
In the current practice, medical device software is largely
designed informally, as shown in Fig. 1.a. The domain
expert, the physician in this case, first comes up with
physiological safety/efficacy requirements which describe
the objective of the device. Together with the software
engineer, they specify the software specifications for the
device, which explain how the device software would
achieve the requirements. Then, the software engineer
and electrical engineer convert the software specifications to physical implementation. However, due to the dis-
crepancies created during manual translations, there is
no formal correlation from physiological requirements to
specification and then to implementation. It is not guaranteed that the final implementation satisfies all physiological requirements. Thus, the safety and efficacy of the
device cannot be ensured.
Fig. 1.b demonstrates how to establish formal correlations throughout the development process using modelbased design framework. The software specification of
the system is represented by a model. Together with a
model of the environment, the closed-loop system is verified using model checking against safety properties which
are converted from the safety/efficacy requirements. Satisfaction of the properties ensures that the software specifications satisfies the safety/efficacy requirements. Using automatic code generation, the specification as modeled, can be translated into C code and implemented
on hardware. The same system model can be used to
generate test cases for conformance testing of the implementation. Satisfaction of all the tests ensures that
the implementation successfully conforms to the software specification. In this paper, we use an implantable
cardiac pacemaker as an example to demonstrate the
use of model checking to verify whether the pacemaker
specification satisfies the safety/efficacy requirements.
1.2 Closed-loop Model Checking
Closed-loop model checking is a widely-used technique
to formally verify the closed-loop system model against
safety and efficacy properties. In this paper, we model
the closed-loop system, which consists of the heart and
a pacemaker, using networks of timed automata [5]. The
closed-loop system model is then verified in model checker
UPPAAL[6] against safety properties specified in Timed
Computational Tree Logic (TCTL).
Safety properties are translated from physiological
requirements learned from cardiac electrophysiology[7]
and [8]. Intuitively the objective of a pacemaker is to
maintain appropriate heart rate. Allowing too slow a
heart rate or driving the heart rate too fast can cause
serious adverse effect to the patient. Thus, it is essential
to maintain appropriate heart rate within a safe range.
Unsafe conditions are specified as unsafe regions within
the state space of the closed-loop system, and their reachability can be checked with a model checker. More importantly, there are closed-loop executions in which the
pacemaker inappropriately raises the heart rate up to
the boundary of the unsafe regions - even from healthy
open-loop heart conditions. These unsafe executions are
referred to as Pacemaker Mediated Tachycardia (PMT),
during which the pacemaker incorrectly drives the heart
into an overly fast rate.
We use these examples to show:
– Whether the anti-PMT algorithms developed by device manufacturers can successfully detect and terminate corresponding PMT.
Zhihao Jiang et al.: Pacemaker Verification
Abstraction
H0
Heart
H1
3
Refinement
H2
H3
H4
No
Model
Checker
Pacemaker
Valid?
Timed automata model
No
TCTL
Yes
Yes
Ambiguous?
Counterexamples
Safe?
No
Yes
Physician
Physiological
requirements
System Safe
Bug found
Fig. 2. Counter-Example-Guided Abstraction Refinement (CEGAR) framework
– After introducing these additional algorithms into
the previously verified system, whether the combined
system has unsafe states.
– Whether the environment model, the heart model
in this case, is complex enough to distinguish PMT
cases from healthy heart conditions, and at the same
time be general enough to represent all possible heart
conditions.
1.3 Model Abstraction and Refinement
Model abstraction [9] was originally proposed as a powerful state-reduction technique to alleviate the state explosion problem [10] during model-checking. Models are
created as abstraction of the original system. Since the
abstracted models have more behaviors than the original
system, properties satisfied in an abstract model will also
be satisfied in the original system. In this paper, we first
derived a timed automata model of the heart tissue by
extracting its timing behaviors. With a similar abstraction scheme used in clinical Cardiac Electro-physiology
study [7], we then abstract the whole heart as electrical
conduction network. The heart model is then further abstracted till its simplest form which covers all possible
inputs to the pacemaker. During each abstraction step,
we prove that the abstracted heart model is a timed simulation of the refined heart model and properties specified
in ATCTL* are preserved.
Now we have a set of heart models from the cellular level to the whole heart, with abstraction relationship between each level. The question we aim to answer
is: What do we determine which environment model to
use during verification for each of the different safety
properties for the closed loop system? We base our approach on the Counter-Example-Guided Abstraction Refinement (CEGAR) framework, proposed by Clake et al.
[11], which can systematically and automatically handle
model complexity.
In this work, we apply and extend the CEGAR framework to handle the complexity of the heart model during verification of a dual chamber pacemaker model. The
framework is shown in Fig. 2. The most abstract heart
model is first combined with a timed-automata-based
pacemaker model [12] based on the algorithm descriptions from Boston Scientific [13]. The closed-loop system
is then verified in model checker UPPAAL [6] against
safety properties (e.g. the pacemaker must not allow the
heart rate to be too slow and must not drive the heart
rate too fast). If the unsafe regions are not reachable
and unsafe executions do not exist, the system is safe.
Otherwise the model checker returns execution traces
as counterexamples which are checked in a more refined
heart model for validity.
There are two scenarios where we use more refined
heart model for model checking:
(1) If the trace is not a valid heart-pacemaker interaction, it is referred to as a spurious counterexample. In this
case we follow the traditional CEGAR framework. The
property is checked with a more refined model until the
spurious behavior is eliminated.
(2) If the trace corresponds to a realistic heart-pacemaker
interaction, we check further whether the returned traces
only contain unsafe conditions that we are looking for.
If the traces returned contains other heart conditions,
the counter-example is referred to as ambiguous. In this
case the property is checked with a more refined model
4
Zhihao Jiang et al.: Pacemaker Verification
until the ambiguity is removed. Otherwise we confirm a
potential bug has been found.
In this paper, we use two Pacemaker Mediated Tachycardia (PMT) (i.e. when the pacemaker drives the heart
into an unsafe state) cases as example to demonstrate
the two scenarios which require heart model refinement.
By using the improved CEGAR framework we are able
to check a wide range of physiological properties. The
framework also improved the model checking efficiency
without losing accuracy. The heart model abstraction
enables model checking for more complex systems and
the model refinement enables us to check more complex
properties. In contrast to the CEGAR framework proposed by Clarke et al., the model abstraction, model
refinement and trace validity check are done manually
and can be potentially automated in the future work.
1.4 Contributions
This paper builds upon our previous work in [12] in
which we described formal modeling of the pacemaker
and verification of closed-loop interactions with a simple
Random Heart Model and its ad-hoc refinements. The
contributions of this paper are thus:
1. We abstracted the heart from top-down till its simplest form, which allows us to verify wide range of
physiological properties.
2. The heart model abstraction is formalized and the
timed simulation relation between each abstraction
level are established and proved.
3. We improved the Counter-Example-Guided Abstraction and Refinement (CEGAR) framework to balance
model complexity and expressiveness.
4. The safety properties are checked for all possible combinations of pacemaker parameters.
The UPPAAL models developed in this paper are available online [14]. These models can be used as a starting
point for many purposes (e.g. to build models with costs
and probabilities for quantitative analysis of the efficacy
of pacemaker algorithms; development of patient-specific
algorithms). In particular, the verified pacemaker model
can be automatically translated from UPPAAL into Stateflow charts in Simulink for test generation and code generation using the UPP2SF tool [15].
1.5 Organization
The paper is organized as follow: In Section 2, we introduce the basic description for the heart and pacemaker
operation. In Section 3, we describe the timed automata
model of the heart and its abstractions. In Section 4,
we describe the timed automata model of a dual chamber pacemaker. In Section 5, we verify the pacemaker
model against two basic safety properties in UPPAAL;
In Section 6 and 7, we use model checking to identify
A-lead
V-lead
AP
AS
Marker
VS
VP
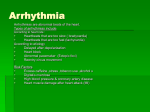
Fig. 3. (a) Electrical Conduction System of the Heart and
pacemaker leads location. (b) Electrical signal sensed from
the pacemaker leads are converted to event markers (AS,VS).
Pacemaker delivers electrical pacing (AP,VP) from corresponding leads when heart rate is slow.
two known cases of PMT, in which the pacemaker inappropriately increases the heart rate. We evaluate the
safety and effectiveness of two anti-PMT algorithms corresponding to the two common PMT cases, and demonstrate two scenarios for heart model refinements.
2 Overview of the Heart’s Electrical
Conduction System
In this section, we review basic concepts related to the
heart and its electrical conduction system which interacts with the pacemaker. In-depth material of cardiac
electro-physiology can be found in [16].
2.1 Basics of Cardiac Electrophysiology Operation
The coordinated contraction of the heart is governed by
its Electrical Conduction System (see Fig. 3). The Sinoatrial (SA) node, which is a collection of specialized tissue
at the upper right atrium, periodically spontaneously
generates electrical pulses that can cause muscle contraction. The SA node acts as the natural pacemaker of
the heart. The electrical pulses first cause both atria to
contract, forcing the blood into the ventricles. The electrical conduction is then delayed at the Atrioventricular
(AV) node, allowing the ventricles to fill fully. Finally,
the fast-conducting His-Pukinje system spreads the electrical activation within both ventricles, causing simultaneous contraction of the ventricular muscles, and pumps
the blood out of the heart. The electrical conduction
system of the heart is a timed system and appropriate
timing is key to proper heart rhythm.
Due to various factors such as aging and disease,
the conduction properties of heart tissue may change.
These changes often cause timing anomalies in heart
rhythm, thus decreasing the blood pumping efficiency
of the heart. These timing anomalies are referred to as
arrhythmias, and are categorized into so-called Tachycardia and Bradycardia. Tachycardia features undesirable
Zhihao Jiang et al.: Pacemaker Verification
fast heart rate which results in inefficient blood pumping. Bradycardia features slow heart rate which results
in insufficient blood supply. Bradycardia is due to failure of impulse generation with anomalies in the SA node,
or failure of impulse propagation where the conduction
from atria to the ventricles is delayed or blocked.
2.2 Interfacing the Heart with the Pacemaker
Heart tissue can also be activated by external electrical pulses. Implantable Pacemakers have been developed
to deliver timely electrical pulses to the heart to maintain an appropriate heart rate and Atrial-Ventricular
synchrony. Implantable pacemakers normally have two
leads fixed on the wall of the right atrium and the right
ventricle respectively (Fig. 3 (a)). These leads are capable of both sensing electrical activity in the heart tissue and are able to emit pacing signals into the tissue.
Tissue activation near the leads is sensed by the leads,
triggering an Atrial Sense (AS) and Ventricular Sense
(VS) events in the pacemaker (see Fig. 3 (b)). Atrial
Pacing (AP) and Ventricular Pacing (VP) are delivered
if no sensed events occur within pre-specified deadlines.
A dual chamber pacemaker only utilizes activation timing information of two small regions in the heart. The
“low-resolution” sensing of the pacemaker results in its
limited knowledge of current heart condition thus could
lead to potential incorrect estimation of the heart’s electrical activity and result in inappropriate therapies.
In order to deal with different heart conditions, modern pacemakers can be programmed to operate in different modes. The modes are labeled using a three character system (e.g. DDD) by the Heart Rhythm Society
[16]. The first character describes the pacing locations
(i.e. atrium or ventricle or both), the second character
describes the sensing locations, and the third character
describes how the pacemaker software responds to sensing. For example, the dual-chamber DDD mode stands
for sensing in both atrium and ventricle, and pace both
of them if needed. In this effort, we describe two most
commonly used modes of pacemaker, the dual-chamber
DDD mode, that paces both the atrium and the ventricle, senses both chambers, and sensing can both activate
or inhibit further pacing. Similarly, the VDI mode paces
only in the ventricle, senses both chambers, and inhibits
pacing if event is sensed [8]. During certain heart condition changes, the pacemaker has to switch between different modes to achieve better treatment. It is very important to ensure that the mode-switches are performed
as intended, and no safety issues can occur during the
transition between different modes.
3 Heart Modeling and Abstraction
In this section, we model the timing behaviors of the
heart using timed automata [5]. We first model the heart
5
tissue at cellular level. Through a series of abstractions
we end up with a series of heart model with complexity
from maximum to the minimum. By proving the timed
simulation relationship between each pair of heart model
abstractions, the properties proved in the abstract level
can be preserved. By specifying the safety properties
with a universal subset of Timed Computational Tree
Logic (ATCTL)[17], a model checker like UPPAAL [6,
18] can return counter-examples upon violations of the
properties. This enables us to balance model complexity
and property expressiveness using the Counter-ExampleGuided Abstraction and Refinement (CEGAR) framework.
3.1 Timed Automata and Timed Simulation
Timed automata [5] are an extension of a finite automaton with a finite set of real-valued clocks. It has been
used for modeling and verifying systems which are triggered by events and have timing constraints between
events. UPPAAL is a standard tool for modeling and verification of real-time systems, based on networks of timed
automata. The graphical and text-based interface makes
modeling more intuitive. Requirements can be specified
using Computational Tree Logic (CTL) [19] and violations can be visualized in the simulation environment.
3.1.1 Syntax of Timed Automata
A timed automaton G is a tuple hS, S0 , Σ, X, inv, Ei,
where
–
–
–
–
–
S is a finite set of locations.
S0 ∈ S is the set of initial locations.
Σ is the set of events.
X is the set of clocks.
inv is the set of invariants for clock constraints at
each location.
– E is the set of edges. Each edge is a tuple hs, σ, Ψ, λ, s0 i
which consists of a source location s, an event σ ∈ Σ,
clock constraints Ψ , λ as a set of clocks to be reset
and the target location s0 .
For the clock variables X, the clock constraints Ψ ∈
Ψ X can be inductively defined by Ψ := x⊥ckΨ1 ∧ Ψ2 ,
where ⊥ ∈ {≤, =, ≥}, and c ∈ N.
3.1.2 Semantics of Timed Automata
A state of a timed automaton is a pair hs, vi which contains the location s ∈ S and the valuation v for all clocks.
The set of all states is Ω. For all λ ∈ X, v[λ := 0] denotes the valuation which sets all clocks x ∈ λ as zero
and the rest of the clocks unchanged. For all t ∈ R, v + t
denotes the valuation which increase all the clock value
by t. There are two kinds of transitions between states.
6
Zhihao Jiang et al.: Pacemaker Verification
The discrete transition happens when the condition of an
edge has been met. So we have:
hs, σ, Ψ, λ, s0 i ∈ E, v |= Ψ, v[λ := 0] |= inv(s0 )
σ
⇒ (s, v) −
→ (s0 , v[λ := 0])
The timed transition happens when the timed automaton
can stay in the same location for certain amount of time.
We have:
δ ∈ R, ∀δ 0 ≤ δ, v + δ 0 |= inv(s)
δ
⇒ (s, v) −
→ (s, v + δ)
3.1.3 Timed Simulation
1 1 1 1
1
1
1
For two timed
automata
T
=
S
,
S
,
Σ
,
X
,
inv
,
E
0
and T 2 = S 2 , S02 , Σ 2 , X 2 , inv 2 , E 2 , a timed simulation
relation is a binary relation sim ⊆ Ω 1 × Ω 2 where Ω 1
and Ω 2 are sets of states of T 1 and T 2 . We say T 2 time
simulates T 1 (T 1 t T 2 ) if the following conditions holds:
– Initial states correspondence: ( s10 , 0 , s20 , 0 ) ∈ sim
– Timed transition: For every (hs1 , v1 i , hs2 , v2 i) ∈ sim,
δ
if hs1 , v1 i −
→ hs1 , v1 + δi, there exists hs2 , v2 + δi such
δ
that hs2 , v2 i −
→ hs2 , v2 + δi and
(hs1 , v1 + δi , hs2 , v2 + δi) ∈ sim.
– Discrete transition: For every (hs1 , v1 i , hs2 , v2 i) ∈ sim,
σ
if hs1 , v1 i −
→ hs01 , v10 i, there exists hs02 , v20 i such that
σ
hs2 , v2 i −
→ hs02 , v20 i and (hs01 , v10 i , hs02 , v20 i) ∈ sim.
Certain properties are preserved for timed simulation
relation. For ϕ ∈ AT CT L, if M t M 0 , we have M 0 |=
ϕ ⇒ M |= ϕ.[17] However, M 0 6|= ϕ ⇒ M 6|= ϕ does not
hold. Violations of AT CT L yield counter-examples and
the validity of which need to be checked on more refined
model.
It is known that timed simulation relation is also
closed under composition [17]. So when we have two
heart models H1 t H2 we will have H1 kP t H2 kP
where P is the timed-automata model of the pacemaker.
For ϕ ∈ AT CT L, we have H2 kP |= ϕ ⇒ H1 kP |= ϕ.
With this property we can verify the pacemaker model
with abstract heart model. In the rest of the section, we
will describe how we develop our initial heart model from
the physiological perspective and abstract the model step
by step so that the complexity of the model is reduced
for verification. Given two heart models H1 , H2 and a
timed simulation mapping sim=Ω1 ×Ω2 , there are no automated methods to check H1 t H2 . In the Appendix,
we show the manual proof for the timed simulation relation between two heart models H2 and H3 . Other timed
simulation relations can be proved similarly.
3.2 Initial Tissue Model
The initial model of the heart abstracts the electrical behaviors of the heart tissue. When the tissue is activated
by an external electrical signal, the voltage across the
tissue increases rapidly. When the voltage reaches a certain threshold, the adjacent tissue will be activated. This
activation then propagates throughout the heart, causing coordinated contraction of the heart muscles. Fig. 4
(a) shows the voltage change over time across a heart
tissue region (solid line) and its adjacent tissue region
(dotted line). After the activation, the heart tissue must
recover from the activation (i.e. recharge) before it can
be activated again. The time interval before the tissue
voltage drops back to resting voltage is referred to as the
Refractory Period. The refractory period can be divided
into the Effective Refractory Period (ERP) and the Relative Refractory Period (RRP) according to their different
response to new activation signals [7] [16].
We construct our initial heart model by modeling the
timing behaviors of the heart tissue. The timed automaton N0 is shown in Fig. 4 (b). The tissue starts from
the Rest location. The tissue can self-activate after certain period and go to cond location which models the
short delay before it activates the adjacent tissue. After
the cond location the model goes to ERP location during which no activation events can be processed. The
duration of the cond location and ERP location depend
on the state of the tissue when it was activated by the
previous activation signal. In this model, we use nondeterminism to cover all possible duration length. After
the ERP finishes, the model goes from the ERP location
to the RRP location. If the heart tissue receives activation when it is in the RRP location, it will go to the ERP
location with prolonged ERP length, which is covered
by non-determinism. The tissue then goes back to the
Rest location after the RRP period.
Consider the Act node? event as input and Act next!
as output; N0 covers all possible timing behaviors of a
heart tissue. The whole heart can be modeled by composing tissue models with different parameters H0 =
N01 kN02 · · · N0n . However, for a real heart the number
n is very large and their connectivity and parameter
values are difficult, and perhaps impossible, to determine, which makes verification with H0 infeasible. For
the remainder of the section, please refer to both Fig. 4
along with Fig. 5 for progressive abstraction of the heart
model. The abbreviations for the locations in Fig. 5 are
shown in the table below. The figures are more understandable in color.
3.3 Abstraction 1: Model Conduction Delay with Path
During the Electro-physiology testing procedure [16], the
physician places catheters with multiple electrodes into
different locations of the patient’s heart to perform a
“timing analysis” of the propagation of electrical signals
through heart. The local electrical activity of heart tissue at the locations of the electrodes can be monitored.
The physician then evaluates the heart condition by examining the refractory properties of local tissue, and the
Zhihao Jiang et al.: Pacemaker Verification
7
Vout
Refractory
a
Time
ERP
Rest
RRP
ERP
Rest
Rest
RRP
Rest
Cond
Original tissue Model
Rest
t<=Trest_max
b
N0
t>Trest_min
t=0
cond
t<=Tcond_max
Act_node?
t=0
Act_node?
t=0
t>Trrp_min
t=0
RRP
t<=Trrp_max
t>Tcond_min
t=0
Act_next!
ERP
t<=Terp_max
t>Terp_min
t=0
N0
Abstraction 1
Rest
t<=Trest_max
c
Act_node?
t=0
Act_node?
t=0
t>Trrp_min
t=0
RRP
t>Terp_min
t<=Trrp_max
t=0
temp
d
Rest
t<=Trest_max
t>Terp_min
t=0
ERP
t<=Terp_max
Act_path!
t2=0
Act_node_2!
Act_node_1!
t2<=Tcond_max
t1<=Tcond_max
t1+t2>Tcond_min
Act_path!
ERP
Act_node_2?
t<=Terp_max
Act_node_1?
Double
Ante
Act_path_2?
t<=Tcond_max
t>Tcond_min
Act_node_2!
temp
t<=Trest_max
Act_path_2?
Idle
t=0
Act_path_1?
Retro
t<=Tcond_max
t>Tcond_min
Act_node_1!
P2
Act_path_1?
t=0
Act_node?
P1
t=0
N2
Rest
t1+t2<=Tcond_max
Act_path_1?
t>Trest_min
e
P1
t>1
Conflict t<=1
t1>Tcond_min
t2>Tcond_min Retro
Ante
t>Trest_min
t=0
Act_node?
t=0
N1
Act_path_2?
t1=0
N1
Abstraction 2
Idle
Act_path_1?
t>Trest_min
t=0
Ante
temp
Act_path_1?
t=0
Act_path_2?
Act_path_2?
t=0
Act_path_1?
Retro
t<=Tcond_max
t<=Tcond_max
t>Tcond_min
t>Tcond_min
Idle
Act_node_2!
Act_node_1!
Act_path_2?
t=0
Act_path!
P3
N3
t>0
t=0
f
Rest
t<=Trest_max
Act_node?
temp
t=0
Act_path!
N4
Fig. 4. (a) Electrical voltage change on the surface of the heart tissue and its adjacent tissue region (dotted) upon activation.
The whole process is divided into timing periods with different behaviors. (b) The original tissue model which captures the
timing behaviors of the heart tissue. (c) The conduction property is separated to the path automaton and the heart can
be modeled as conduction network. (d) Equivalent locations are merged. (e) The blocking property of the ERP location is
replaced by a non-deterministic transition in the path automaton. (f) The correlation between the two nodes is replaced by
allowing the node automaton to have more behaviors.
8
Zhihao Jiang et al.: Pacemaker Verification
RE
RR
RE
CO
RE
RE
RR
RR
RR
CO
RE
ID
RR
RR
RE
CO
RR
RE
RT
ER
CO
RE
CO
CO
RE
ID
RE
RR
ID
RR
RR
RT
ER
ER
CO
ER
AN
RE
ER
ID
ER
ER
ER
ER
ID
RR
RR
ER
ER
RR
ER
AN
RR
ER
DO
ER
a
CO
ER
RR
ID
RE
RR
ID
ER
Act_path_1! Act_node_2!
Act_next!
Act_next!
Act_node_1! Act_path_2!
RE
ID
RR
RE
RT
ER
RE
ID
RE
RR
ID
RE
RR
ID
RR
RR
RT
ER
ER
AN
RR
ER
AN
RE
ER
DO
ER
b
RE
ID
RE
RE
RT
ER
ER
ID
ER
ER
ID
ER
ER
ID
RR
ER
ID
RE
RR
ID
ER
𝑷𝟏
𝑵𝟏𝟐
𝑵𝟐𝟏
RE
RT
ER
ER
AN
RE
𝑷𝟐
𝑵𝟐𝟐
Act_node_1! Act_path_2!
Act_node_1! Act_path_2!
RE
ID
RE
RE
ID
ER
Act_path_1! Act_node_2!
Act_path_1! Act_node_2!
𝑵𝟏𝟏
ER
AN
RE
c
RE
RT
RE
RE
ID
RE
RE
AN
RE
d
RE
RE
ER
ID
ER
ER
ID
RE
RE
ID
ER
Act_path_1! Act_node_2!
𝑵𝟏𝟐
𝑷𝟐
𝑵𝟐𝟐
Act_node_1! Act_path_2!
Act_path_1! Act_node_2!
𝑵𝟏𝟑
𝑷𝟑
𝑵𝟐𝟑
𝑵𝟏𝟒
𝑵𝟐𝟒
Act_node_1! Act_path_2!
Fig. 5. (a) Model conduction delay between nodes as path; (b) Merging RRP with Rest; (c) Replace blocking property of ERP with
non-deterministic conduction; d. Use self activation to replace conduction
Zhihao Jiang et al.: Pacemaker Verification
Location
ERP
RRP
Rest
Cond
Idle
Ante
Retro
Double
Abbreviation
ER
RR
RE
CO
ID
AN
RT
DO
Description
Effective Refractory Period
Relative Refractory Period
Rest Period
Conduction Period
No Conduction
Antegrade Conduction
Retrograde Conduction
Both Way Conduction
Table 1. Abbreviations used in heart models
timing delays for an electrical activation to conduct from
one electrode to another. Due to the limited number of
electrodes that can be placed into the heart, the physician can examine the refractory properties at the locations of the electrodes, and only consider the conduction
delays between the electrodes. The procedure give us the
intuition to abstract the heart as a conduction network
as shown in Fig. 4 (c).
3.3.1 Tissue level abstraction
At the tissue level, we model the conduction delay between node automata using a path automaton. So two
adjacent node automata N01 kN02 can be simulated by
two node automata and a path automaton (N11 kP1 kN12 )
(Fig. 4 (c)). In the new node automaton N1 , location
cond is replaced by a committed location temp. In cond
location, N0 does not have a transition for Act node?,
which is equivalent to the ERP location. So the time for
the cond location is added to the new ERP location:
N1 .T erp max = N0 .T erp max + N0 .T cond max
N1 .T erp min = N0 .T erp min + N0 .T cond min
The path automaton P1 models the conduction property
of between N01 and N02 with
P1 .T cond min = min(N01 .T cond min, N02 .T cond min)
P1 .T cond max = max(N01 .T cond max, N02 .T cond max)
The location correspondence and abstraction are shown
in Fig. 5 (a). A typical timed execution where a node
N01 got activated and activates the other node N02 after
delay is shown below:
Act node 1?
REkRE −−−−−−−−→
9
one of the nodes finishes conducting, it will send Act next!
event to the adjacent node and enter ERP location. Since
the other node is in Cond or ERP location, there is no
transition for the Act next! event and the conduction is
blocked. So the locations for COkER, ERkCO, ERkER
are abstracted as a single location ERkIDkER. We claim
that N01 kN02 t N11 kP1 kN12 and the heart can be modeled as H1 = N11 kP11 kN12 · · · P1m kN1n . This model transformation does not simplify the heart model, but it provides an abstract conduction path of arbitrary length
with node and path automata.
3.3.2 Conduction Path Abstraction
A node automaton can generate Act path! events by
self-activation, and prevent Act node! event to trigger
Act path! during ERP. If the self-activation period is
too long for a node automaton N1i , and its ERP is short
enough not to block any Act node! event, it can be removed from the model and the paths connect to it can
be merged. A conduction path with N 1 kP 1 kN 2 kP 2 kN 3
can be abstracted into N 4 kP 3 kN 5 with the following
assumptions:
min(N 1 .T erp min, N 3 .T erp min) ≥ N 2 .T erp max
max(N 1 .T rest max, N 3 .T rest max) < N 2 .T rest min
The first assumption infers that when the location of N 3
changes from ERP to RRP, it is guaranteed that N11 .ERP
&& N12 .ERP. Under this assumption N 2 won’t block any
activation signal travel from N 1 to N 3 and vice versa.
The second assumption guarantees that the clock t of
N 2 will be reset before reaching Trest min in Rest location, so there will not be self-activation from N 2 . Under
these two assumptions we can have N 4 = N 1 , N 5 = N 3 ,
P 3 .Tcond min = P 1 .Tcond min + P 2 .Tcond min
P 3 .Tcond max = P 1 .Tcond max + P 2 .Tcond max
This can be generalized for acyclic conduction paths of
arbitrary length. The first assumption can be achieved
by assigning node automata to the locations with longer
ERP. Since the pacemaker only has two leads monitoring the timing delay between heart activation events, and
the AV node has the longest ERP period, the heart structure can be abstracted with two nodes and a path H10 =
N11 kP11 kN12 kP12 kN13 , with the Act node events from N11
and N13 as input to the pacemaker.
δ≥T cond min
COkRE −−−−−−−−−→ ERkCO
Act next!
Correspondingly, in N11 kP1 kN12 , the path P1 is immediately activated when the node N11 is activated, and
after the same conduction delay the node N12 on the
other end of the path is activated.
Act node 1?
REkIDkRE −−−−−−−−→
Act path 1!
δ≥T cond min
ERkAN kRE −−−−−−−−−→ ERkCF kER
Act node 2!
We use Double location in path automaton to model
when both node automata are in Cond location. When
3.3.3 Resolve Non-determinism with Linear
interpolation
Abstraction 1 can be used in verification but not testing
due to the non-deterministic choices of parameters. It
captures all behaviors of the heart tissue but is not able
to simulate a particular behavior, especially over multiple heart cycles. In [20], we developed the Virtual Heart
Model (VHM) which resolved the non-determinism in
Abstraction 1 with linear interpolations and can be used
10
Zhihao Jiang et al.: Pacemaker Verification
Aget !
1
3
2
AP !
Heart
Pacemaker
Vget !
VP !
Fig. 6. (a) The heart model generates heart events (Aget,Vget) and responds to pacemaker events (AP,VP). (b) Basic 5 timing cycles
of DDD pacemaker which maintain minimal heart rate, minimal A-V delay and filter noises
to mimic the behavior of different heart conditions. For
example, the non-deterministic ERP range [Tmin , Tmax ]
is interpolated as a linear function:
3
Tmin + (1 − (1 − t/T rrp) ) · (Tmax − Tmin )
(1)
where t is the time since the node enters the RRP location.
3.4 Abstraction 2: Merging Equivalent Locations
The heart model H10 still has equivalent locations. In
Abstraction 2 we further abstract the node and path
automata. With non-determinism, the node automaton
react to Act node! event the same way in RRP and Rest
state. In the new node automaton N2 we merge the RRP
state with the Rest state with:
N2 .T rest min = N1 .T rest min + N1 .T rrp min
N2 .T rest max = N1 .T rest max + N1 .T rrp max
Since during ERP state, the node automata won’t react to any Act node! event, for a N11 kP1 kN12 setting, the
symbolic state ERkDOkER is equivalent to ERkIDkER.
Under the assumption that the ERP period of a node
automaton is much longer than the conduction delay of
a path automaton, it is guaranteed that both node automata will be in ERP location when the path exits the
Double location. In the path automaton, the Double and
Conflict location is merged with the Idle state. The location abstraction and mapping is in Fig. 5 (b). The heart
can be modeled as H2 = N21 kP21 kN22 kP22 kN23 .
3.5 Abstraction 3: Replacing Blocking with
Non-deterministic Conduction
In Abstraction 3, we replace the blocking behavior of the
ERP location of the node with non-deterministic conduction in the path automaton. There exists a transition
Act node 1?
Act path 1?
REkIDkRE −−−−−−−−→ −−−−−−−→ REkIDkRE
Act path 1!
in N31 kP31 kN32 to replace transition
Act node 1?
ERkIDkER −−−−−−−−→ ERkIDkER
in N21 kP21 kN22
Without the ERP constraint the AV node is no longer
needed and the heart can be modeled as H3 = N31 kP3 kN32 .
The location abstraction and mapping is in Fig. 5 (c).
The detailed proof for this timed simulation relation is
in the appendix.
3.6 Abstraction 4: Random Heart Model (RHM)
In Abstraction 4, we further simplify the heart model
by removing the conduction path between two nodes.
By setting T rest min for both nodes to 0 the new heart
model H4 = N31 kN32 covers all possible behavior of H3 .
The location abstraction and mapping is in Fig. 5 (d).
This random heart model with two nodes is the most
abstract model that will be used at the beginning of the
closed-loop verification process in Section 5.
Eventually we have a series of heart models with:
N01 kN02 · · · N0n
t N11 kP11 kN12 · · · P1m kN1n
t N11 kP11 kN12 kP12 kN13
t N21 kP21 kN22 kP22 kN22
t N31 kP3 kN32
t N41 kN42
4 Pacemaker Modeling
In this section, we discuss our timed-automata model of
the pacemaker. The overview of the closed-loop system is
showed in Fig. 6(a). The interactions between the heart
and the pacemaker are modeled by using binary event
channels. The activation of N 1 of the heart is the input
to the atrial lead
N 1 .Act path! →Aget!
Zhihao Jiang et al.: Pacemaker Verification
AS?
AS?
VS?
11
LRI
AP!
VS?
VP?
VP?
(a) LRI component
Aget?
VS?
VP?
VS?
VP!
AVI
(c) URI component
(b) AVI component
PVARP
AS!
Vget?
AR!
VP?
(d) PVARP component
URI
VP?
VRP
VS!
(e) VRP component
Fig. 7. (a)LRI component delivers AP! event if the V-A delay exceeds TLRI-TAVI; (b)AVI component delivers VP! if the A-V
delay exceeds TAVI while the V-V delay is longer than TURI; (c)URI component keeps track of the V-V delay; (d)PVARP
component filters certain Aget! from the heart and generates AS!; (e)VRP component filters certain Vget! from the heart and
generates VS!
and for ventricular lead
N 2 .Act path! →Vget!
4.1.1 Lower Rate Interval (LRI)
The Lower Rate Interval (LRI) component is shown in
The pacemaker accordingly generates atrial or venFig. 7(a). This component defines the longest interval
tricular pacing actions
allowed between two ventricular events, thus keeps the
AP!→ N 1 .Act node!
heart rate above a minimum value. In DDD mode, the
VP!→ N 2 .Act node!
LRI interval is divided into a V-A interval (TLRI-TAVI)
to the corresponding nodes in the heart. We now present
and a A-V interval (TAVI). The LRI component mainour pacemaker model within the closed-loop heart-pacemakertains a maximum V-A delay while the AVI component
system.
maintains a maximum A-V delay so together they main-
4.1 Basic DDD pacemaker modeling
The DDD pacemaker has 5 basic timing cycles triggered
by events, as shown in Fig. 6(b). We decomposed our
pacemaker model into 5 components which correspond
to the 5 counters. P = LRIkAV IkU RIkP V ARP kV RP .
These components synchronize with each other using
broadcast channels and shared variables (as shown in
Fig. 7).
tain the maximum V-V delay. In the LRI component,
the clock is reset when a ventricular event (VS, VP) is
received. If no atrial event has been sensed (AS), the
component will deliver atrial pacing (AP) after TLRITAVI. The UPPAAL design of LRI component is shown
in Fig. 7(a).
4.1.2 Atrio-Ventricular Interval (AVI) and Upper Rate
Interval (URI)
The function of the AVI component is to maintain the
appropriate delay between the atrial activation and the
ventricular activation. It defines the longest interval be-
12
Zhihao Jiang et al.: Pacemaker Verification
wait_1st
Vget?
t=0
VP?
wait_2nd
t=0
Vget?
wait_v
secV
VP?
t=0
(a) Monitor PLRI test
Vget?
t=0
VP?
t=0
wait_vp
VP?
secV
t=0
Vget? t=0
(b) Monitor PURI test
Fig. 8. (a) Monitor for LRL: Interval between two ventricular events should be less than TLRI, (b) Monitor for URL: Interval between
a ventricular event and a VP should be longer than TURI
tween an atrial event and a ventricular event. If no ventricular event has been sensed (VS) within TAVI after
an atrial event (AS, AP), the component will deliver ventricular pacing (VP). In order to prevent the pacemaker
from pacing the ventricle too fast, a URI component uses
a global clock clk to track the time after a ventricular
event (VS, VP). The URI limits the ventricular pacing
rate by enforcing a lower bound on the times between
consecutive ventricle events. If the global clock value is
less than TURI when the AVI component is about to
deliver VP, AVI will hold VP and deliver it after the
global clock reaches TURI. The UPPAAL design of AVI
and URI component is shown in Fig. 7(b) and (c).
4.1.3 Post Ventricular Atrial Refractory Period
(PVARP) and Post Ventricular Atrial Blanking
(PVAB)
Ventricular events, especially Ventricular Pace (VP) are
sometimes so strong that the atrial lead can sense the activation as well. This signal may be falsely recognized as
an atrial event and disrupt normal pacemaker function.
This scenario is called crosstalk and was discussed in our
previous work [21]. In order to prevent this undesired
behavior, there is a blanking period (PVAB) followed
by a refractory period (PVARP) for the atrial events
after each ventricular event (VS, VP). Atrial events during PVAB are ignored and atrial events during PVARP
trigger AR! event which can be used in some advanced
diagnostic algorithms. The UPPAAL design of PVARP
component is shown in Fig. 7(d).
4.1.4 Ventricular Refractory Period (VRP)
Correspondingly, the VRP follows each ventricular event
(VP, VS) to filter noise and early events in the ventricular channel which could otherwise cause undesired pacemaker behavior. Fig. 7(e) shows the UPPAAL design of
VRP component.
4.1.5 Parameter Selection
In order to cope with the large variety of patient conditions, the timing parameters of the pacemaker can be
programmed to discrete values. In our previous work
[12], we picked a set of default values for the parameters
and verified safety properties on it. In order to evaluate
the safety of the pacemaker software, it is important to
check all possible parameter combinations. Since there
are only a finite number (i.e. 8000) of different parameter combinations [13], in this paper we enumerate all of
them and check all properties on each combination.
5 Reachability of Unsafe Regions
In this section, we define unsafe regions regarding bradycardia and tachycardia and specify two fundamental safety
properties. These two fundamental safety properties are
strict so that they must be satisfied by any pacemaker
under all heart conditions.
5.1 Lower Rate Limit
The most essential function for the pacemaker is to treat
bradycardia by maintaining the ventricular rate above a
certain threshold. We define the region where the ventricular rate is slow, as unsafe. The monitor PLRI test is
designed to measure interval between ventricular events
and is shown in Fig. 8(a). For property
ϕLRI =A[] (PLRI test.secV imply PLRI test.t≤TLRI)
we have H4 kP kP LRI test |= ϕLRI .
5.2 Upper Rate Limit
The pacemaker is not designed to treat tachycardia so it
can only pace the heart to increase its rate and cannot
slow it down. However, it is still important to guarantee
it does not pace the ventricles beyond a maximum rate
to ensure safe operations. To this effect, an Upper Rate
Interval (URI) is specified such that the pacemaker can
increase the ventricular rate up to this limit.
We require that a ventricle pace (VP) can only occur
at least T U RI after a ventricle event (VS, VP). The
monitor PURI test is shown in Fig. 8(b). For the property
ϕU RI =A[] (PURI test.secV imply PURI test.t≥TURI)
we have H4 kP kP U RI test |= ϕU RI .
Since ϕLRI and ϕU RI belong to ATCTL*, the verified
properties are preserved in the real heart.
In the following two sections, we discuss two closedloop unsafe executions where the pacemaker inappropriately increases the heart rate. Such executions are referred to as Pacemaker Mediated Tachycardia (PMT).
Zhihao Jiang et al.: Pacemaker Verification
13
Intrinsic pathway
2
AS
1
VS
Fast “pathway”: pacemaker
A-V synchrony
0
AS
AS
AS
AS
AS
3
VP
VP
VP
1000
VP
VP
2000
3000 ms
(a) Virtual circuit formed by the pacemaker and the (b) Pacemaker trace for ELT initialized by a early venheart
tricular signal
Fig. 9. Endless Loop Tachycardia case study demonstrating the situation when the pacemaker drives the heart into an unsafe state [22]
We use existential properties PE ∈ ET CT L∗ to show the
existence of these executions and use ¬PE to prove the
correctness of the corresponding Anti-PMT algorithms.
Since AGϕ ≡ ¬EF(¬ϕ), the properties also belong to
ATCTL* and are preserved for the real heart.
and terminates ELT by increasing TPVARP time once
to block the AS caused by the V-A conduction. By increasing the blocking interval after a ventricular event,
the pacemaker effectively ignores the early atrial signal
detected due to the PVC.
6 Endless Loop Tachycardia
6.1 Existence of ELT
The AVI component of a dual-chamber pacemaker introduces a virtual A-V conduction pathway. This forms
a timing loop with the intrinsic (physiological) A-V conduction pathway (see Fig. 9(a)). A Premature Ventricular Contraction (PVC), i.e. an early extra beat in the
ventricular, may trigger another ventricular event (VS)
and initiate a V-A conduction through the intrinsic pathway (Marker 1 in Fig. 9(b)). The pacemaker registers
this signal as an Atrial Sense (AS) (Marker 2 in Fig. 9(b)).
This event triggers a VP after TAVI, as if the signal conducts through the “virtual” A-V pathway (Marker 3 in
Fig. 9(b)). We call it “virtual” pathway as the “conduction” delay is fulfilled by a timer in the pacemaker
instead of a physical signal propagation along the heart
tissue. The VP will trigger another V-A conduction and
this VP-AS-VP-AS looping behavior will continue (see
Fig. 9(b)). The interval between atrial events is TAVI
plus the V-A conduction delay, which is normally shorter
than the delay between intrinsic heart beats, thus will
drive the ventricular rate as high as the Upper Rate
Limit. During ELT, the heart rate is not only high, but
also fixed, which is unsafe scenario.
Due to the limited information the pacemaker has
about the heart, the pacemaker cannot distinguish a retrograde atrial event from an intrinsic atrial event which
is triggered by the SA node. From the pacemaker’s point
of view, the pacemaker paces the ventricles as specified
for every AS. That is why open-loop testing is unable to
detect this closed-loop behavior.
Modern pacemakers are equipped with anti-ELT algorithms to identify and terminate potential ELT. One
common algorithm identifies ELT by the ELT pattern
Two monitors were designed to show the existence of
ELT. One monitor, PELT det, shows the persistence of
the VP-AS pattern and the other monitor, Pvv, shows
that the ventricular rate is always no slower than the
upper rate limit (Fig. 10). The property
ϕELT =E[] ((not PELT det.err) && (not Pvv.err))
checks the existence of ELT behavior. After our initial
verification we have:
H4 kP kP ELT detkP vv |= ϕELT
The evidence trace shows the behavior of the system.
For simplicity we only show the state of the heart:
AV I.t≥T AV I∧U RI.t≥T U RI
REkRE −−−−−−−−−−−−−−−−−−−→
V P !→Act node 2!
N 1 .t≥0
REkRE −−−−−−−−−−−→
Act path 1!→AS!
AV I.t≥T AV I∧U RI.t≥T U RI
REkRE −−−−−−−−−−−−−−−−−−−→
V P !→Act node 2!
N 1 .t≥0
REkRE −−−−−−−−−−−→
Act path 1!→AS!
REkRE
6.2 Trace Validation and Heart Model Refinement
We check this trace on more refined H3 kP and discovered that the trace above can correspond to two different
scenarios:
AV I.t≥T AV I∧U RI.t≥T U RI
REkAN kRE −−−−−−−−−−−−−−−−−−−→
V P !→Act node 2!
N 1 .t≥N 1 .T rest min
REkIDkRE −−−−−−−−−−−−−→
Act path 1!→AS!
AV I.t≥T AV I∧U RI.t≥T U RI
REkAN kRE −−−−−−−−−−−−−−−−−−−→
V P !→Act node 2!
N 1 .t≥N 1 .T rest min
REkIDkRE −−−−−−−−−−−−−→ REkAN kRE
Act path 1!→AS!
14
Zhihao Jiang et al.: Pacemaker Verification
PELT_det
Pv_v
Fig. 10. (a) Any pattern other than VP-AS will result in error state (b) If the ventricular rate is slower than the Upper Rate
Limit will go to error state
3
1
2
Fig. 11. (1) The component PVAS sends VP AS! event when a VP-AS pattern with delay between [150,200] is detected; (2)
Component ELTct. After 8 VP-AS pattern, the algorithm increase TPVARP to 500ms. (3) Modified PVARP’ component.
TPVARP can only be set to 500 for one timing cycle.
and
AV I.t≥T AV I∧U RI.t≥T U RI
REkIDkRE −−−−−−−−−−−−−−−−−−−→
6.3 ELT termination algorithm
REkRT kRE −−−−−−−−−−−−−−−−−−−−→
The ELT will persists without intervention and the patient’s heart is forced to beat at a fast rate approaching
the Upper Rate Limit. Thus, device manufacturers require a way to identify ELT and terminate it despite
of the limited information the pacemaker can get. The
ELT detection algorithm by Boston Scientific [23] utilizes these three features:
– Ventricular rate at Upper Rate Limit
– VP-AS pattern
– Fixed V-A conduction delay
V P !→Act node 2!
P.t≥P.T cond min
Act node 1!→Act path 1!→AS!
AV I.t≥T AV I∧U RI.t≥T U RI
REkIDkRE −−−−−−−−−−−−−−−−−−−→
V P !→Act node 2!
P.t≥P.T cond min
REkRT kRE −−−−−−−−−−−−−−−−−−−−→
Act node 1!→Act path 1!→AS!
REkIDkRE
Both traces correspond to actual clinical scenarios.
However, the second trace corresponds to the ELT behavior which inappropriately increased the heart rate.
By setting N 1 .T rest min ≥ T U RI in H3 we can model
the healthy heart and the first scenario will be eliminated. However, in H4 the T rest min is set to 0 so the
two cases cannot be distinguished. So we use the refined
heart model H3 with N 1 .T rest min ≥ T U RI. With the
new heart model we have:
H3 kP kP ELT detkP vv |= ϕELT
The evidence trace, which is exactly the second trace
above, shows exactly the ELT scenario.
The pacemaker first monitors VP-AS pattern with ventricular rate at upper rate limit. Then it compares the
VP-AS interval with previous intervals. ELT is confirmed
if the difference between the current VP-AS interval and
the first VP-AS interval are within ±32ms for 8 consecutive times. Then the pacemaker increases the PVARP
period to 500ms once so that the next AS will be blocked
and will not trigger a VP. ELT will then be terminated.
As the V-A conduction delays are patient-specific, the
algorithm compares the VP-AS interval to a previously
sensed value instead of an absolute value. Since we can
Zhihao Jiang et al.: Pacemaker Verification
AS
AS AS AS AS AS AS AS AS
VS
0
VS
1000
VS
2000
[AR] [AR] [AR]
AS AS AS AS
AS
VS
3000
Appropriate
PMT
Bradycardia
SVT
15
VP
VS
4000
ms
(a)
0
VP
1000
VP
AP
AP
VP
VS
VS
2000
3000
4000
ms
(b)
Fig. 12. (a) Open-loop: 3:1 A-V conduction during SVT and low ventricular rate without SVT; (b) With DDD pacemaker: the pacemaker
paces the ventricle for every atrial sense (AS), thus increase the ventricular rate inappropriately
not store past clock values in UPPAAL, we can not explicitly model this ELT detection algorithm. However,
since the conduction delay in our heart model is within
a known range, we can compare the VP-AS interval with
this range. The VP-AS pattern detection module V P AS
for our anti-ELT algorithm is shown in Fig. 11 (1). It
detects the VP-AS pattern with ventricular rate at the
Upper Rate Limit and sends out a VP AS event if the
interval qualifies.
A counter ELT ct counts the number of qualified VPAS patterns. It increases the PVARP period to 500ms if
eight consecutive VP-AS patterns are detected. (Fig. 11
(2)) The PVARP component is also modified so that the
PVARP period can only be changed once by the antiELT algorithm. (Fig. 11 (3))
6.4 Verification of the algorithm:
With the new pacemaker model
P1 = LRIkAV IkU RIkP V ARP 0 kV RP kELT ctkV P AS
we first check whether the two fundamental safety properties still hold when the anti-ELT algorithm is introduced. We have
a pacemaker event trace during SVT, with a ODO mode
pacemaker which just sensing in both channels. In this
particular case, every 3 atrial events (AS) correspond to
1 ventricular event (VS) during SVT. As an arrhythmia,
SVT is still considered as a safe heart condition since
the ventricles operate under normal rate can and still
maintain adequate cardiac output.
However, in the closed loop case with the pacemaker,
the AVI component of a dual chamber pacemaker is
equivalent to a virtual pathway in addition to the intrinsic conduction pathway between the atria and the
ventricles. The pacemaker tries to maintain 1:1 A-V conduction and thus increases the ventricular rate inappropriately to match the atrial rate. Fig. 12(b) shows the
pacemaker trace of the same SVT case with DDD pacemaker. Although half of the fast atrial events are filtered by the PVARP period ([AR]s), the DDD pacemaker still drives the closed-loop system into 2:1 A-V
conduction with faster ventricular rate, which is inappropriate. This problem can be resolved by switching the
pacemaker from the dual chamber mode, which couples
the atrial and ventricular rates, into a single chamber
mode to maintain appropriate ventricular rate independent of the atrial rate.
H3 kP1 kP LRI test |= ϕLRI
H3 kP1 kP U RI test |= ϕU RI
7.2 Existence of PMT during SVT
Then we check the existence of ELT and we have:
H3 kP1 kP ELT detkP vv 6|= ϕELT
which indicates the algorithm successfully eliminated all
ELT executions.
7 Verification of the Mode-Switch Algorithm
7.1 Supraventricular tachycardia (SVT)
SVT is an arrhythmia which features an abnormally fast
atrial rate. Typically, in the open loop case, the AV node,
which has a long refractory period, can filter most of the
fast atrial activations during SVT thus the ventricular
rate remains relatively normal. Fig. 12(a) demonstrates
The monitor Pv v is designed to show existence of PMT
during SVT. It goes to the error state if the ventricular
rate drops below the Upper Rate Limit (Fig. 15).
We specify
ϕM S = E[](notP v v.err)
which verifies the existence of PMT. To identify the
PMT scenario, we first set H3 .N 1 .T rest min < 100 so
that the atrial rate can be high and H3 .N 2 .T rest min >
T U RI so that the intrinsic heart rate is less than TURI.
The property is first verified on pacemaker without the
mode-switch algorithm. We have
H3 kP kP v v |= ϕM S
The property is satisfied and the evidence trace shows
the behavior of the system.
N 1 .t≥N 1 .T rest min
REkIDkRE −−−−−−−−−−−−−→
Act path 1!→AS!
16
Zhihao Jiang et al.: Pacemaker Verification
AS?
AR?
AP?
Fast?
Slow?
du_end?
Fast!
Interval
Slow!
1
DDD!
Counter
VDI!
du_beg!
VS?
VP? Duration
du_beg?
du_end!
2
3
Fig. 13. (a) Component INT An atrial event (AS,AR) arrive before thresh after the previous atrial event is regarded as fast
event. Atrial event arrive after thresh and AP are regarded as slow event; (b) Component CNT After 8 fast event the algorithm
will start a duration by sending du beg and will switch to VDI mode when the duration ends (du end); (c) Component DUR
The duration length is 8 ventricular events (VS,VP)
P.t≥P.T cond min
REkAN kRE −−−−−−−−−−−−−−−−−−−−→
Act node 2!→Act path 1!→V S!
N 1 .t≥N 1 .T rest min
REkIDkRE −−−−−−−−−−−−−→
Act path 1!→AS!
P.t≥P.T cond min
REkAN kRE −−−−−−−−−−−−−−−−−−−−→
Act node 2!→Act path 1!→V S!
REkIDkRE
The time between two VS! events are less than TURI
so the property holds. But that is not exactly the PMT
case we are looking for.
7.3 Trace Validation and Heart Model Refinement
dead-end state where the trace cannot proceed in the refined model and ERkAN kREkAN kRE is the bad state
which is in the same abstract state as the dead-end state
and enables the trace to proceed in the abstract model.
The heart model needs to be refined so that the bad state
and the dead-end state are separated and the spurious
counter-example is eliminated. So we refine the heart
model from H3 to H2 with H3 t H2 . Our second verification effort shows that:
H3 kP kP v v |= ϕM S
The property is satisfied and the evidence trace shows
the behavior of the system.
N 1 .t≥N 1 .T rest min
REkIDkREkIDkRE −−−−−−−−−−−−−→
When a path P3 receives a Act path 1! event, there are
Act path 1!
two non-deterministic transitions. ID −−−−−−−→ ID
Act path 1!
and ID −−−−−−−→ AN . From the trace above we can
see that every atrial event triggers the path conduction.
When the trace is validated against
H2 = N21 kP21 kN22 kP22 kN23
we have:
N 1 .t≥N 1 .T rest min
REkIDkREkIDkRE −−−−−−−−−−−−−→
Act path 1!→AS!
P 1 .t≥P 1 .T cond min
ERkAN kREkIDkRE −−−−−−−−−−−−−−−−→
Act node 2!→Act path 2!
N 1 .t≥N 1 .T erp min
Act path 1!→AS!
P 1 .t≥P 1 .T cond min
ERkAN kREkIDkRE −−−−−−−−−−−−−−−−→
Act node 2!→Act path 2!
N 1 .t≥N 1 .T erp min
ERkIDkERkAN kRE −−−−−−−−−−−−−→
N 1 .t≥N 1 .T rest min
REkIDkERkAN kRE −−−−−−−−−−−−−→
Act path 1!→AS!
AV I.t≥T AV I∧U RI.t≥T U RI
ERkAN kERkAN kRE −−−−−−−−−−−−−−−−−−−→
Act node 3!→V P !
ERkAN kERkDOkER
In the trace, the pacemaker delivers VP for every atrial
event, increasing the ventricular rate, which is exactly
the PMT case.
ERkIDkERkAN kRE −−−−−−−−−−−−−→
N 1 .t≥N 1 .T rest min
REkIDkERkAN kRE −−−−−−−−−−−−−→
Act path 1!→AS!
7.4 Mode-Switch Algorithm
P 1 .t≥P 1 .T cond min
ERkAN kERkAN kRE −−−−−−−−−−−−−→
Act node 2!
ERkIDkERkAN kRE
The second Act node 2! is blocked by N32 so it won’t
conduct to N33 and trigger VS!. So it turns out to be a
spurious counter-example. ERkAN kERkAN kRE is the
We now analyze the approach use in pacemakers to prevent prolonged ventricular pacing under SVT. Intuitively,
the mode-switch algorithm first detects SVT. After confirmed detection, it switches the pacemaker from a dualchamber mode to a single-chamber mode. During the
Zhihao Jiang et al.: Pacemaker Verification
AS?
VS?
VP?
DDD?
VDI?
17
AS?
VS?
LRIMS
AP!
AP?
DDD?
AVIMS
VP!
VDI?
Fig. 14. (a) After switching to VDI mode, the new LRI component LRI’ maintains a minimum V-V interval; (b) After switching
to VDI mode, the new AVI component AVI’ keeps track of the time after each atrial events.
single-chamber mode, the A-V synchrony function of the
pacemaker is deactivated thus the ventricular rate is decoupled from the fast atrial rate. After the algorithm
determines the end of SVT, it will switch the pacemaker
back to the dual chamber mode.
The mode-switch algorithm specification we use is
similar to the one described in the Boston Scientific pacemakers manual [13]. The algorithm first measures the interval between atrial events outside the blanking period
(AS, AR). The interval is considered as fast if it is above
a threshold (Trigger Rate) and slow otherwise. In our
UPPAAL model we model it as IN T (see Fig. 13 (1)). A
counter CN T increments for fast events and decrements
for slow events (see Fig. 13 (2)). After the counter value
reaches the Entry Count, the algorithm will start a Duration (DU R) which is a time interval used to confirm
the detection of SVT (see Fig. 13 (3)). In the Duration,
the counter keeps counting. If the counter value is still
positive after the Duration, the pacemaker will switch to
the VDI mode (Fallback mode). In the VDI mode, the
pacemaker only senses and paces the ventricle. At any
time if the counter reaches zero, the Duration will terminate and the pacemaker is switched back to DDD mode.
In our UPPAAL model of the mode-switch algorithm,
we use nominal parameter values from the clinical setting. We define trigger rate at 170bpm (350ms), entry
count at 8, duration for 8 ventricular events and fallback
mode as VDI.
In order to model both DDD and VDI modes and the
switching between them, we made modifications to the
AVI and LRI components. In each component two copies
for both modes are modeled, and switch between each
other when switching events (DDD, VDI) are received.
During VDI mode, VP is delivered by the LRI component instead of the AVI component. The clock values are
shared between both copies in order to preserve essential
intervals even after switching. The modified AVI (AV I 0 )
and LRI (LRI 0 )components are shown in Fig. 14. So the
new pacemaker model is:
P2 =LRI’kAVI’kURIkPVARPkVRPkINTkCNTkDUR
7.5 Verification against fundamental safety properties
We verify the same fundamental safety properties on the
pacemaker model with mode-switch algorithm. We have:
H2 kP2 kP U RI test |= ϕU RI
H2 kP2 kP LRI test 6|= ϕLRI
The Upper Rate Limit property still holds but the Lower
Rate Limit property is violated. The counterexample
is proved to be valid after checking the trace of more
refined heart models. By analyzing the trace we found
that when the pacemaker is switching from VDI mode
to DDD mode, the responsibility to deliver VP switched
from LRI component to AVI component. Since the clock
reference is different (Ventricular events in LRI component and Atrial events in AVI component), the clock
value for delivering the next VP is not preserved. As a
result, if an atrial event which triggered the mode-switch
from VDI to DDD happens within [TLRI-TAVI, TLRI)
after the last ventricular event, the next ventricular pacing will be delayed by at most TAVI time, which violates
the Lower Rate Limit property (Fig. 16(a)).
7.6 Verification Result
After implementing the Mode-switch algorithm, we verified the model against the same existence property. We
expect the violation of this property, since during VDI
18
Zhihao Jiang et al.: Pacemaker Verification
Fig. 15. Monitor Pv v for SVT: There exists an endless se-
quence in which interval between ventricular events is at most
TURI
VDI
MS
AS
AS
DDD
Slow
AS
Aget
Fast
TAVI
TLRI
VS (VP)
AS
Fast
PVAB
VP
VS
(a)
(b)
Fig. 16. (a) Safety Violation: VP is delayed due to the reset of
timer during mode-switch, (b) Correctness Violation: The blocking
period may block some atrial events, turning two Fast events to
one Slow event [12]
mode the ventricular rate of the heart model is less than
the Upper Rate Limit and will not trigger ventricular
pacing. However, this property is still satisfied, indicating the mode-switch algorithm failed to eliminate the
PMT scenario. The evidence trace returned by UPPAAL
shows that a subset of atrial events fall into the blanking period after a ventricular event (see Fig. 16(b)). As
a result, two fast events are reduced to one slow event
and mode switch may never happen. This scenario does
exist in all our refined heart models, we conclude that
the trace is physiologically feasible. The mode-switch algorithm in our pacemaker model can not terminate all
PMT behaviors as specified.
7.7 Trace Validation on Real Pacemaker and
Pacemaker Refinement
In the previous subsections, we have found two potential
safety violations in our pacemaker model. However, this
does not mean the actual pacemaker has the same violation. Jiang et al. have implemented the VHM model onto
a programmable integrated circuit (FPGA) platform and
had it interact with a real pacemaker at run-time [24].
The closed-loop behavior can be checked in closed-loop
with a real pacemaker. If the trace is not feasible in the
closed-loop system, the pacemaker model needs to be refined to eliminate the execution. However, refining the
pacemaker model requires more detailed representation
of the pacemaker software, which was not available to us
at that time.
8 Related Work
Chen et. al [25] extended our verification work [12]. They
developed a hybrid heart model which is able to simulate action potential at tissue level. The model is a more
refined model than our Virtual Heart Model [20], with
linear dynamics on each state of the heart tissue. They
also developed a probability model to simulate natural pacemaker function. They then used the combined
heart model for quantitative verification of the pacemaker. However, since the pacemaker only sense the timing of the heart tissue activation, their hybrid extension
for action potential does not bring much benefit but increased model complexity dramatically. As a result, they
have to use bounded model checking thus sacrificed accuracy.
Jee et. al present a safety assured development approach of real-time software using pacemaker as their
case study in [26]. They formally model and verify a single chamber VVI pacemaker using UPPAAL and then
implement it and check the preservation of properties
transferred from model to implementation code.
Tuan et. al propose an RTS formal model for pacemaker and its environment and verified it against number of safety properties and timed constraints using the
PAT model checker [27]. They have modeled the pacemaker for all 18 operating modes as described in Boston
scientific, but their work lacks specification and analysis
of complex behaviors of the pacemaker, such as modeswitch.
Wiggelinkhuizen uses mCRL2 and UPPAAL to formally model the pacemaker from the firmware design of
Vitatron’s DA+ pacemaker [28]. Two main approaches
have been used to investigate the feasibility of applying
formal model checking to the design of device firmware.
The main approach consists of verifying the firmware
model in context of a formal heart model and a formal
model of a hardware module which fails for high heart
rates because of the state explosion. Another approach
is to verify a part of firmware design which was feasible
and was able to detect a known deadlock rather soon.
Macedo et. al have developed a concurrent and distributed real-time model for a cardiac pacemaker through
a pragmatic incremental approach [29]. The models are
expressed using the VDM and are validated primarily
by scenario-based test, where test scenarios are defined
to model interesting situations such as the absence of
input pulses. The models cover 8 modes of pacemaker
operation.
Gomes et. al present a formal specification of pacemaker system using the Z notation in [30]. They have
also tried to validate that the formal specification satisfies the informal requirements of Boston Scientific by using a theorem prover, ProofPower-Z. They have partially
checked the consistency of their specification through
reasoning. No validation experiment regarding safety conditions were performed yet.
Mery et. al in [31], formally model all operational
modes of a single electrode pacemaker system using eventB and prove them. They use an incremental proof-based
approach to refine the basic abstract model of the system
and add more functional and timing properties. They use
Zhihao Jiang et al.: Pacemaker Verification
the ProB tool to validate their models in different situations such as absence of input pulses.
9 Conclusion and Future Work
In this paper, we first extend our TACAS’12 paper [12]
by formalizing the heart model abstraction process. By
establishing the timed simulation relation between abstraction levels the safety properties specified in ATCTL*
are preserved during refinement. Based on the heart model
formulation we proposed a Counter-Example-Guided Abstraction and Refinement (CEGAR) framework to balance model complexity and fidelity for pacemaker verification. We demonstrated how to identify two unsafe
Pacemaker Mediated Tachycardia (PMT) executions using model checking and heart model refinement for more
specific heart conditions. We also verified the safety and
effectiveness of the corresponding Anti-PMT algorithms.
The work in this paper demonstrated the application
of formal methods and model checking techniques for
evaluating safety and efficacy of Cyber-Physical Systems
like medical devices. This is a step toward certification of
verified models and automated synthesis to verified code
for medical device regulatory efforts. As future work,
there are several directions worth exploration:
1. The CEGAR framework enables us to explore more
complex pacemaker algorithms for more specific heart
conditions.
2. In the CEGAR framework, model abstraction, model
refinement and trace validity check are performed
manually using physiological reasoning. The domain
knowledge can be potentially formalized into rules
and the abstraction and refinement process can be
automated.
3. In this paper we only evaluated binary safety properties. We are interested in quantitative properties such
as power consumption and physiological efficacy. Our
current efforts are on extending this framework to incorporate tools and techniques for quantitative verification of closed-loop medical devices.
4. In this work we only investigate the interaction between the heart and the pacemaker so that only simple rate-based properties can be specified. Investigating the interaction between the heart and the oxygen
demands from the rest of the body will give us better
metric for the efficacy of the devices.
Acknowledgements. The authors would like to thank Ashutosh
Trivedi, from the University of Pennsylvania and the Indian
Institute of Technology, Mumbai, for fruitful discussions during the preparation of this paper.
References
1. List of Device Recalls, U.S. Food and Drug Admin., (last
visited Jul. 19, 2010).
19
2. K. Sandler, L. Ohrstrom, L. Moy, and R. McVay. Killed
by Code: Software Transparency in Implantable Medical
Devices. Software Freedom Law Center, 2010.
3. AUTOSAR website: http://www.autosar.org/.
4. AVSI website: http://www.avsi.aero.
5. R. Alur and D. L. Dill. A Theory of Timed Automata.
Theoretical Computer Science, 126:183–235, 1994.
6. K.G. Larsen, Paul Pettersson, and Wang Yi. UPPAAL
in a Nutshell. International Journal on Software Tools
for Technology Transfer (STTT), pages 134–152, 1997.
7. M.E. Josephson. Clinical Cardiac Electrophysiology. Lippincot Williams and Wilkins, 2008.
8. S. Barold, R. Stroobandt, and A. Sinnaeve. Cardiac
Pacemakers Step by Step. Blackwell Futura, 2004.
9. E. M. Clarke, O. Grumberg, and D. E. Long. Model
Checking and Abstraction. ACM Trans. Program. Lang.
Syst., 16(5):1512–1542, 1994.
10. Edmund M. Clarke, Orna Grumberg, and Doron A.
Peled. Model Checking. 2000.
11. Edmund Clarke, Orna Grumberg, Somesh Jha, Yuan Lu,
and Helmut Veith. Counter Example-Guided Abstraction Refinement for Symbolic Model Checking. J. ACM,
50(5):752–794, 2003.
12. Zhihao Jiang, Miroslav Pajic, Salar Moarref, Rajeev
Alur, and Rahul Mangharam. Modeling and Verification of a Dual Chamber Implantable Pacemaker. Tools
and Algorithms for the Construction and Analysis of Systems, 7214:188–203, 2012.
13. The Compass - Technical Guide to Boston Scientific Cardiac Rhythm Management Products. 2007.
14. Zhihao Jiang, Miroslav Pajic, Rajeev Alur, and Rahul
Mangharam. Pacemaker UPPAAL model download:
http://mlab.seas.upenn.edu.
15. Miroslav Pajic, Zhihao Jiang, Insup Lee, Oleg Sokolsky,
and Rahul Mangharam. From Verification to Implementation: A Model Translation Tool and a Pacemaker Case
Study. In Proceedings of the 2012 IEEE 18th Real Time
and Embedded Technology and Applications Symposium,
RTAS ’12, pages 173–184, 2012.
16. R.N. Fogoros. EP Testing. Blackwell Science, 1999.
17. Satoshi Yamane. Timed Weak Simulation Verification
and its Application to Stepwise Refinement of Real Time
Software. International Journal of Computer Science
and Network Security, 6, 2006.
18. Gerd Behrmann, Alexandre David, and Kim G. Larsen.
A Tutorial on UPPAAL. Formal Methods for the Design of Real-Time Systems, Lecture Notes in Computer
Science, pages 200–236, 2004.
19. Edmund M. Clarke and E. Allen Emerson. Design and
Synthesis of Synchronization Skeletons Using BranchingTime Temporal Logic. In Logic of Programs, Workshop,
pages 52–71, 1982.
20. Zhihao Jiang, Miroslav Pajic, and Rahul Mangharam.
Cyber-Physical Modeling of Implantable Cardiac Medical Devices. Proceedings of the IEEE, 100(1):122 –137,
Jan. 2012.
21. Zhihao Jiang and Rahul Mangharam. Modeling Cardiac Pacemaker Malfunctions with the Virtual Heart
Model. In Engineering in Medicine and Biology Society,EMBC, 2011 Annual International Conference of the
IEEE, pages 263 –266, Sept 2011.
20
Zhihao Jiang et al.: Pacemaker Verification
22. Z. Jiang, M. Pajic, and R. Mangharam. Model-based
Closed-loop Testing of Implantable Pacemakers. In ICCPS’11: ACM/IEEE 2nd Intl. Conf. on Cyber-Physical
Systems, 2011.
23. PACEMAKER System Specification. Boston Scientific.
2007.
24. Zhihao Jiang, Sriram Radhakrishnan, Varun Sampath,
Shilpa Sarode, Miroslav Pajic, and Rahul Mangharam.
Heart-on-a-Chip: A Closed-loop Testing Platform for Implantable Pacemakers. In Third Workshop on Design,
Modeling and Evaluation of Cyber Physical Systems (CyPhy), CPS Week, 2013.
25. T. Chen, M. Diciolla, M. Kwiatkowska, and A. Mereacre.
Quantitative Verification of Implantable Cardiac Pacemakers. In Hybrid Systems: Computation and Control
(HSCC 2013), 2013.
26. E. Jee, S. Wang, J. K. Kim, J. Lee, O. Sokolsky, and
I. Lee. A Safety-Assured Development Approach for
Real-Time Software. The Proceedings of 16th IEEE
International Conference on Embedded and Real-Time
Computing Systems and Applications, pages 133–142,
2010.
27. L. A. Tuan, M. C. Zheng, and Q. T. Tho. Modeling and
Verification of Safety Critical Systems: A Case Study on
Pacemaker. Fourth International Conference on Secure
Software Integration and Reliability Improvement, pages
23–32, 2010.
28. J. E. Wiggelinkhuizen. Feasibility of Formal Model
Checking in the Vitatron Environment. Master thesis,
Eindhoven University of Technology, 2007.
29. Macedo H. D., Larsen P. G., and Fitzgerald J. Incremental Development of a Distributed Real-Time Model of a
Cardiac Pacing System using VDM. Formal Methods,
pages 28–30, 2008.
30. A. O. Gomes and M. V. Oliveira. Formal Specification of a Cardiac Pacing System. In Proceedings of the
2nd World Congress on Formal Methods (FM ’09), pages
692–707, 2009.
31. D. Mery and N. K. Singh. Pacemaker’s Functional Behaviors in Event-B. Research report, INRIA, 2009.
A Appendix
Proof for N12 kP2 kN22 t N13 kP3 kN23
In this subsection we manually prove the timed simulation relation N21 kP2 kN22 t N31 kP3 kN32 . The other relations can be proved accordingly.
A.1 Timed Simulation Relation sim
For two timed automata T 1 and T 2 , we write timed
simulation relation sim is defined on Ω1 × Ω2 where
(s, v) ∈ Ω1 and v is the valuation of all clocks t1 ∈ X1 .
((s, v), (s0 , v 0 )) is in sim if and only if v 0 = v(λ + δ), for
δ ∈ D, such that sim(s, v) = (s0 , v(λ + D))
Let T 1 = N21 kP2 kN22 and T 2 = N31 kP3 kN32 . X1 =
1
{tn2 , tp2 , tn22 } and X2 = {tn13 , tp3 , tn23 }, the state mapping for the timed simulation relation is shown below:
sim(REkIDkRE, v) = (REkIDkRE, v(tn13 + D1 , tn23 +
D2 )) where D1 = [N21 .T erp min, N21 .T erp max],
D2 = [N22 .T erp min, N22 .T erp max]
A special condition for this mapping is the initial state:
sim(REkIDkRE, v(tn13 := 0, tp3 := 0, tn23 := 0)) =
(REkIDkRE, v(tn13 + D1 , tn23 + D2 ))
sim(ERkAN kRE, v) = (REkAN kRE, v)
sim(REkRT kER, v) = (REkRT kRE, v)
sim(ERkIDkER, v) = (REkIDkRE, v)
sim(ERkIDkRE, v) = (REkIDkRE, v(tn23 + D))
where D = [N22 .T erp min, N22 .T erp max]
sim(REkIDkER, v) = (REkIDkRE, v(tn13 + D))
where D = [N21 .T erp min, N21 .T erp max]
The location mapping is shown in Fig. 5.
A.2 Timed Transitions
Here we want to ensure every timed transition for T 1
has a corresponding timed transition in T 2 . We denote
S = (s, v) and Sδ = (s, v + δ). For each location in T 1 we
δ
have S −
→ Sδ for ∀δ ∈ R under condition v + δ |= inv(s).
In T 2 we use S 0 = (s0 , v 0 ) and Sδ0 = (s0 , v 0 + δ). For
(S, S 0 ) ∈sim we show that there exists Sδ0 such that
δ
s0 −
→ s0δ and (sδ , s0δ ) ∈sim. For every location we list
all the corresponding components and provide proof.
For location REkIDkRE in T 1 we have:
S = (REkIDkRE, v)
Sδ = (REkIDkRE, v + δ)
inv(s) = tn12 + δ ≤ N21 .T rest max &&
Zhihao Jiang et al.: Pacemaker Verification
tn22 + δ ≤ N22 .T rest max)
D1 = [N21 .T erp min, N21 .T erp max],
D2 = [N22 .T erp min, N22 .T erp max].
S 0 = (REkIDkRE, v(tn13 + D1 , tn23 + D2 ))
Sδ0 = (REkIDkRE, v(tn13 + D1 , tn23 + D2 ) + δ)
inv(s0 ) = tn13 + D1 + δ ≤ N31 .T rest max and tn23 + D2 +
δ ≤ N32 .T rest max
Since
N3 .T rest max = N2 .T rest max + N2 .T erp max
we have inv(s) ≡ inv(s0 ) so the correspondence holds.
For location ERkAN kRE in T 1 we have:
S = (ERkAN kRE, v)
Sδ = (ERkAN kRE, v + δ)
inv(s) = tp2 + δ ≤ P2 .T cond max
S 0 = (REkAN kRE, v)
Sδ0 = (REkAN kRE, v + δ)
inv(s0 ) = tp3 + δ ≤ P3 .T cond max
Since P2 .T cond max == P3 .T cond max, we have
inv(s) ≡ inv(s0 ) so the correspondence holds.
For location REkRT kER in T 1 we have:
S = (REkRT kER, v)
Sδ = (REkRT kER, v + δ)
inv(s) = tp2 + δ ≤ P2 .T cond max
S 0 = (REkRT kRE, v)
Sδ0 = (REkRT kRE, v + δ)
inv(s0 ) = tp3 + δ ≤ P3 .T cond max
Since P2 .T cond max == P3 .T cond max, we have
inv(s) ≡ inv(s0 ) so the correspondence holds.
21
Since
N3 .T rest max = N2 .T rest max + N2 .T erp max
We have inv(s) ⊆ inv(s0 ) so the correspondence holds.
For location REkIDkER in T 1 we have:
S = (REkIDkER, v)
Sδ = (REkIDkER, v + δ)
inv(s) = tn12 + δ ≤ N21 .T rest max&&
tn22 + δ ≤ N22 .T erp max
D = [N21 .T erp min, N21 .T erp max]
S 0 = (REkIDkRE, v(tn13 + D)
Sδ0 = (REkIDkRE, v(tn13 + D) + δ)
inv(s0 ) = tn13 + D + δ ≤ N31 .T rest max&&
tn23 + δ ≤ N32 .T rest max
Since
N3 .T rest max = N2 .T rest max + N2 .T erp max
We have inv(s) ⊆ inv(s0 ) so the correspondence holds.
A.3 Discrete Transitions
During a discrete transition, a state S = (s, v) proceed
to Sλ = (s0 , v(λ := 0)). Here we prove that for every
σ
discrete transition S −
→ Sλ in T 1 , there exists S1 =
σ
(s1 , v) such that (S, S1 ) ∈sim, S1 −
→ Sλ,1 for Sλ,1 =
0
0
(s1 , v(λ := 0)) and (Sλ , Sλ,1 ) ∈sim.
Self-activation for N21 triggers antegrade conduction,
we have N3 .T rest = N2 .T erp + N2 .T rest
tn1 >N 1 .T rest minkAct node 1?
2
2
−−−
−−−−−−−−−−−−−−−→
(REkIDkRE,v) −−−
For location ERkIDkER in T 1 we have:
S = (ERkIDkER, v)
Sδ = (ERkIDkER, v + δ)
inv(s) = tn12 + δ ≤ N21 .T erp max&&
tn22 + δ ≤ N22 .T erp max
S 0 = (REkIDkRE, v)
Sδ0 = (REkIDkRE, v + δ)
inv(s0 ) = tn13 + δ ≤ N31 .T rest max&&
tn23 + δ ≤ N32 .T rest max
Since
N3 .T rest max = N2 .T rest max + N2 .T erp max
We have inv(s) ⊆ inv(s0 ) so the correspondence holds.
Act path 1!
(ERkAN kRE,v(tn12 := 0, tp2 := 0))
⇓
tn1 >N 1 .T rest minkAct node 1?
3
3
(REkIDkRE,v) −−−
−−−
−−−−−−−−−−−−−−−→
Act path 1!
(REkAN kRE,v(tn13 := 0, tp3 := 0))
Self-activation for N22 triggers retrograde conduction,
we have N3 .T rest = N2 .T erp + N2 .T rest.
tn2 >N 2 .T rest minkAct node 2?
2
2
−−−
−−−−−−−−−−−−−−−→
(REkIDkRE,v) −−−
Act path 2!
(REkRT kER,v(tp2 := 0, tn22 := 0))
⇓
tn2 >N 2 .T rest min)kAct node 2?
(REkIDkRE,v) −−3−−−3−−−−−−−−−−−−−−−−→
Act path 2!
1
For location ERkIDkRE in T we have:
S = (ERkIDkRE, v)
Sδ = (ERkIDkRE, v + δ)
inv(s) = tn12 + δ ≤ N21 .T erp max&&
tn22 + δ ≤ N22 .T rest max
D = [N22 .T erp min, N22 .T erp max]
S 0 = (REkIDkRE, v(tn23 + D)
Sδ0 = (REkIDkRE, v(tn23 + D) + δ)
inv(s0 ) = tn13 + δ ≤ N31 .T rest max&&
tn23 + D + δ ≤ N32 .T rest max
(REkRT kRE,v(tp3 := 0, tn23 := 0))
N22 activated after antegrade conduction
tp2 >T cond min
(ERkAN kRE,v) −−−−−−−−−−→
Act node 2!
(ERkIDkER,v(tn22 := 0))
⇓
tp3 >T cond min
(REkAN kRE,v) −−−−−−−−−−→
Act node 2!
(REkIDkRE,v(tn23 := 0))
22
Zhihao Jiang et al.: Pacemaker Verification
N21 activated after retrograde conduction
(REkIDkRE,v(tn13 := 0))
tp2 >T cond min)
(REkRT kER,v) −−−−−−−−−−−→
Act node 1!
(ERkIDkER,v(tn12 := 0))
⇓
tp3 >T cond min)
(REkRT kRE,v) −−−−−−−−−−−→
Act node 1!
(REkIDkRE,v(tn13 := 0))
ERP of
N21
Blocking during ERP is simulated by a non-deterministic
transition in the path
Act node 1?
(ERkIDkER,v) −−−−−−−−→ (ERkIDkER,v)
⇓
Act node 1? Act path 1?
(REkIDkRE,v) −−−−−−−−→ −−−−−−−→
Act path 1!
finishes first
tn1 >N 1 .T erp min
2
2
(ERkIDkER,v) −−−
−−−
−−−−−−→
1
(REkIDkER,v(tn2 := 0))
⇓
tn1 >N 1 .T erp min
3
3
(REkIDkRE,v) −−−
−−−
−−−−−−→
(REkIDkRE,v)
(REkIDkRE,v)
Act node 2?
(ERkIDkER,v) −−−−−−−−→ (ERkIDkER,v)
⇓
Act node 2? Act path 2?
(REkIDkRE,v) −−−−−−−−→ −−−−−−−→
Act path 2!
(REkIDkRE,v)
Act node 1?
ERP of
N22
finishes first
tn2 >N 2 .T erp min
2
2
−−−
−−−−−−→
(ERkIDkER,v) −−−
(ERkIDkRE,v(tn22 := 0))
⇓
tn23 >N32 .T erp min
(REkIDkRE,v) −−−−−−−−−−−−→
(REkIDkRE,v)
ERP of N22 finishes after N21
tn2 >N 2 .T erp min
2
2
(REkIDkER,v) −−−
−−−
−−−−−−→
2
(REkIDkRE,v(tn2 := 0))
⇓
D = [N21 .T erp min, N21 .T erp max]
tn2 >N 2 .T erp min
3
3
(REkIDkRE,v(tn13 + D)) −−−
−−−
−−−−−−→
(REkIDkRE,v(tn13 + D))
ERP of N21 finishes after N22
tn1 >N 1 .T erp min
2
2
(ERkIDkRE,v) −−−
−−−
−−−−−−→
1
(REkIDkRE,v(tn2 := 0))
⇓
D = [N31 .T erp min, N31 .T erp max]
tn1 >N 1 .T erp min
3
3
(REkIDkRE,v(tn23 + D)) −−−
−−−
−−−−−−→
(REkIDkRE,v(tn23 + D))
N22 is activated when N21 is in ERP
Act node 2?
(ERkIDkRE,v) −−−−−−−−→
Act path 2!
(ERkIDkER,v(tn22 := 0))
(⇓
Act node 2?
(REkIDkRE,v) −−−−−−−−→
Act path 2!
(REkIDkRE,v(tn23 := 0))
N22 is activated when N21 is in ERP
Act node 1?
(REkIDkER,v) −−−−−−−−→
Act path 1!
(ERkIDkER,v(tn12 := 0))
⇓
Act node 1?
(REkIDkRE,v) −−−−−−−−→
Act path 1!
(ERkIDkRE,v) −−−−−−−−→ (ERkIDkRE,v)
⇓
D = [N22 .T erp min, N22 .T erp max]
Act node 1?
Act path 1?
(REkIDkRE,v(tn23 + D)) −−−−−−−−→ −−−−−−−→
Act path 1!
(REkIDkRE,v(tn23 + D))
Act node 2?
(REkIDkER,v) −−−−−−−−→ (REkIDkER,v)
⇓
D = [N21 .T erp min, N21 .T erp max]
Act node 2?
Act path 2?
(REkIDkRE,v(tn13 + D)) −−−−−−−−→ −−−−−−−→
Act path 2!
(REkIDkRE,v(tn13 + D))