Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
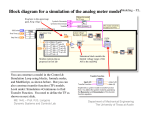
Studying Analog Meter System using LabVIEW-based Vision Raul G. Longoria Updated Summer 2014 ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin The basic analog voltage meter is an electromechanical system. The rotational dynamics are constrained, with deflections over ~90 deg. FRONT PANEL Electrical circuit model Vin Meter movement Rotational system REAR TERMINALS needle Series resistor ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin im The analog voltage meter is designed to position the needle at an angle proportional to the voltage applied at the input terminals. Vin Im For this meter, to deflect the needle 90 degrees (full-scale; red arrow below) requires a current of 1 mA, so to size the series resistor use KVL: Vin − Rseries I m − Rm I m − VG = 0 VG This is voltage drop across meter EM conversion. Rseries Vin − Rm I m − VG 15 ⋅ V − ( 85 ⋅ Ω )1 ⋅ mA − 0 ⋅ V = = = 14915 ⋅ Ω Im 1 ⋅ mA When needle is not moving, the voltage VG = 0 V. Note that this is a static model; no dynamic effects are considered important since the meter is designed to measure DC voltage. The static predictive model is thus: 90 ⋅ deg θ = ⋅Vin 15 ⋅ V ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory See Appendix A for description of lab equipment Department of Mechanical Engineering The University of Texas at Austin Pre-Lab 1. Sizing the series resistor in the analog meter If you wanted the analog meter used in this lab to have full scale response with a 10 volt input, what series resistance would you use? Show and explain your work. Vin VG = 0 Im Vin − Rseries I m − Rm I m − 0 = 0 Rseries ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Vin − Rm I m − VG = Im Department of Mechanical Engineering The University of Texas at Austin As long as there are no physical changes, the needle position will respond in the manner intended by the design. This is an open-loop control system design. Vin 90 ⋅ deg θ = ⋅ Vin ⋅ V 15 θ Analog Meter Think of this as a system that we are trying to control precisely, and that there could be changes or disturbances that were not accounted for in the design. Later we’ll discuss the advantages of using a closed-loop control system and that a benefit of feedback is to make a system insensitive to these effects. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin First, however, we’ll study the input-output relation for this system. A measurement system is needed that provides a measure of θ. The meter as a system under study: Vin θ Analog Meter We want to verify the meter model that relates position to the input voltage – a transfer function. In this lab, all measurement and control is conducted using: (a) LabVIEW-based vision to measure position, θ, and (b) DAQ analog output* (AO) to provide the excitation voltage. *It is an advantage of this small lab system that the DAQ output has sufficient current to drive our actuator – no amplifier is needed. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Lab Objectives st (1 week) • Learn how to use LabVIEW for image analysis and image capture • Run basic image analysis and image capture experiments • Characterize the meter system using a static gain relating angular position to input voltage • Demonstrate open-loop control of angular position ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin We’ll develop a way to measure the angular position using machine vision VIs ( x0 , y0 ) ( xv , yv ) c a θ b ( xv , yv ) It should be clear that measuring the position of the needle is difficult if not impossible using any ‘contact’ sensors, so vision is an excellent option. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Pre-Lab 2. Finding angle from three measured points Given you can measure three different points from the image, as shown below, express an algorithm that will allow you to find needle length, a, the distance, c, and the angle, θ. ( x0 , y0 ) ( x, y ) c a θ b ( xv , yv ) ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin LabVIEW-based Vision • LabVIEW Vision enables you to read/create image files and provides means for managing those files • There are built-in functions (VIs) for analyzing image files (select areas of interest, measure intensity, etc.) • It is necessary to also have LabVIEW IMAQ software which enables you to acquire images from cameras. • In this course, we want to demonstrate how you can use these software tools to develop a simple visionbased measurement system, particularly for object motion. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Overview of LV-Based Vision Tools • Image data type • Analyzing images • Capturing images ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Vision Utilities Image processing Machine vision Department of Mechanical Engineering The University of Texas at Austin Analyzing Images • Vision Utilities – VIs for creating and manipulating images, etc. • Image Processing – provides ‘low level’ VIs for analyzing images. • Machine Vision – groups many practical VIs for performing image analysis. For example, the “Count and Measure Objects” VI is found under this group. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Vision Utilities To create and manipulate images • • • • • Image management (create, dispose, etc.) File handling Image manipulation Pixel editing etc. • Best to learn use through examples. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Reading an Image File This VI block diagram opens an existing image file (e.g., a bitmap), reads the file, and then displays it. On the Front Panel, place an ‘Image Display’ to get this terminal; then wire image data. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Example – looking at an image The simple VI in the previous slide can be used to open an image file. This read-out indicates the size of the image (pixels). When moving the cursor around the image, the readout shows cursor (x,y) coordinates and the ‘intensity’ value at that location. This is the ‘clamp’ example file provided in LabVIEW ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Machine Vision Concepts* • Machine (or computer) vision has six principal areas 1. 2. 3. 4. 5. 6. • • Sensing – which yields a visual image Preprocessing – noise reduction, image enhancement, etc. Segmentation – partitioning an image into objects of interest Description – computation of features for differentiating among types of objects Recognition – identifying objects (e.g., bolt, wrench, etc.) Interpretation – assigning meaning to an ensemble of recognized objects Levels of processing are divided into low (1, 2), medium (3,4,5), and high (6) In this course, we’ll primarily be concerned with low-level vision, and will utilize some functions of medium-level vision. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Machine Vision Concepts* • • • Low-level vision involves processes considered ‘primitive’ (or automatic) and requiring no ‘intelligence’ (1,2). This could be thought of as analogous to how a human eye senses and adapts. Medium-level vision extracts, characterizes, and labels components in an image. High-level vision refers to processes that attempt to emulate perception and cognition. *From Fu, Gonzalez, and Lee, Robotics: Control, Sensing, Vision, and Intelligence, McGraw-Hill, New York, 1987. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin LabVIEW Machine Vision VIs • Select Region of Interest • Light Meter • Count and Measure Objects • You’ll learn how to use some of these in the lab. There are many others you can skim through to get an idea of what is available. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin IMAQ Select Region of Interest You can focus on regions based on: point, line, rectangle, annulus The output from this VI can be sent to other VIs that require that bounding information. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin IMAQ Light Meter If you want to examine pixel intensity in a certain region, you need rectangle information. IMAQ Select Rectangle Use to specify a rectangular area in the image. Rectangle coordinates are output and can be sent to next function. Rectangle Image ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Histogram data (send directly to a waveform graph) Department of Mechanical Engineering The University of Texas at Austin Count and Measure Objects Another VI that needs rectangle information, and which is very useful for basic segmentation is the ‘Count and Measure Objects’ VI. This VI needs several inputs, as shown below. NOTE: This VI requires that you convert the image to grayscale. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin IMAQ Cast Image Example usage shown below: ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Example – Finding Objects and Intensities Image Rectangle Error 3 objects detected The limit on object size prevented the 3 larger objects in the ROI from being identified ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Define ‘Threshold’ Bright objects have ‘high’ intensity values (e.g., 255 for 8-bit) Dark objects have ‘low’ intensity values (e.g., 0 for 8-bit) These objects have an intensity of close to zero. These objects have an intensity of close to 255. For 8-bit image The ‘Threshold’ must often be specified as an input to some machine vision VIs. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Generating Intensity Histogram Light Meter Within the ROI, a histogram is generated of the intensity values. Note that most of the image is made up of pixels with intensity greater than about 180. White is 255. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Capturing Images • • • • • PCI cards (for capturing from streaming source) USB cameras* (web cams, etc.) IMAQdx refers to VIs that can be used with cameras that Firewire cameras interface directly Ethernet/wireless cameras (‘direct show’) USB is the approach targeted for this course: – Low-cost – Relatively easy to use ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin USB Cameras • USB cameras are probably the slowest cameras available, especially the way they are to be used in this course. • Our experience has shown that the maximum bandwidth we can achieve for image acquisition is about 10 frames/sec (within LabVIEW). • Some online sources indicate that ‘hacked’ webcams can achieve 30 frames/sec. • So, it is the software environment (Windows, LV, communications, etc.) that we’ve chosen that is likely placing the restrictions on the performance. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Example: code to acquire USB camera image ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Example: Front Panel Cursor location NxM, 32-bit RGB image ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory RGB levels… Department of Mechanical Engineering The University of Texas at Austin In lab: Use NIMAX to test the camera, fine tune settings 1. 2. 3. 4. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory NI-IMAQ devices Camera name Look at the Acquisition Attributes. Sometimes the default settings are not suitable. For example, this camera is actually a doc cam and the resolution was very high and frame rate too slow for what is needed in this lab. It was set to lower resolution, higher fps. Camera Attributes lets you adjust settings such as focus, contrast, etc. (as long as you have installed the proper camera drivers) Department of Mechanical Engineering The University of Texas at Austin Specify analog out voltage In lab: build a VI to measure the relationship between input voltage and needle position This VI uses vision to measure the meter position and controls the analog out on myDAQ to apply a specified DC voltage. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory ‘bob’ needle length and angle from (0,0) point measured Department of Mechanical Engineering The University of Texas at Austin In lab: Run experiments and measure the static relationship A linear regression is shown, giving a model, θ m = Kθ / v ⋅ v Kθ / v = 15.9 deg/V vOL = Kθ / vθ d For this example, vOL is the input voltage you’d need to ‘dial in’ to position the needle at a desired angular position, θd. We could define the open-loop (dc) gain for this case as, −1 K v /θ = Kθ / v = 0.063 V/deg Relating back to the model, Kθ / v ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory rm = Rm Department of Mechanical Engineering The University of Texas at Austin In lab: Build an open-loop controller A simple open loop control system for positioning the needle ‘bob’ at a given angular location might be formulated as follows: 1. Specify a desired angular position, θd. 2. Use the static model to compute the open loop control voltage, vOL = K v /θ θ d 3. Send this voltage command to an ‘analog output’ VI in LabVIEW 4. Measure the actual position of the needle ‘bob’ center using USB vision measurement. The following data was obtained for a few simple trials: These quick tests show that you can get reasonable results, but it’s hard to judge whether you could position any better. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Open loop control positioning – specify a path A formula node can be used to create a desired trajectory. Below is a graph of the desired trajectory and the measured open loop response. Absolute error is especially large during dynamic response. qd is the ‘desired angle’ T is a period parameter t is the ‘time value’ Note, this uses an open loop control model to specify the voltage command to be generated by the AO device. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Summary • We begin study of an electromechanical analog meter • Vision VIs in LabVIEW provide a way for us to include image acquisition and analysis to our existing set of tools (simulation, DAQ). • The vision VIs alone allow you to use an image as a data type. • Images can be loaded from a file or acquired using IMAQ routines. • Once within LabVIEW, an image can be processed using some very sophisticated built-in programs. • Machine vision VIs enable us to build a simple ‘motion capture’ system for studying the analog meter response and control. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Appendix A: 144L analog meter box and circuit • Both switches in 'up' position (1) places Rs in series with meter (15 V input gives full scale deflection) • Both switches in 'down' position (2) places the potentiometer and 5.1K resistor in series (allows to change properties of the system) ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Appendix B: Image Data Type Menu: NI Measurements->Vision->Vision Utilities->Image Management This VI is used to create an image. It is called prior to, say, capturing an image using a camera. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin Appendix C: Image Type and Bit Depth • We know digital images are formed by an array of pixels, and each pixel is quantized into a number of levels based on the number of bits available. • Depending on whether pixels are black and white, grayscale, or color, pixels have different bit depths. Bit depth refers to the amount of information allocated to each pixel. • When pixels are either black or white, pixels need only two bits of information (black or white), and hence the pixel depth is 2. • For grayscale, the number of levels used can vary but most systems have 256 shades of gray, 0 being black and 255 being white. When there are 256 shades of grey, each pixels has a bit depth of 8 bits (one byte). A 1024 x 1024 grayscale images would occupy 1MB of memory. • In digital color images, the RGB (red green blue, for screen projection) or CMYK (printing color) schemes are used. Each color occupies 8 bits (one byte), ranging in value from 1-256. Hence in RGB each pixel occupies 8x3 =24 (3 bytes) bits, in CMYK 8x4 = 32 bits (4 bytes). • Note, LV uses an ‘alpha’ channel for RGB. The alpha channel stores transparency information--the higher the value, the more opaque that pixel is. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Laboratory Department of Mechanical Engineering The University of Texas at Austin