Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Electrification wikipedia , lookup
Current source wikipedia , lookup
Transformer wikipedia , lookup
Buck converter wikipedia , lookup
Skin effect wikipedia , lookup
Commutator (electric) wikipedia , lookup
Electric motor wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Galvanometer wikipedia , lookup
Alternating current wikipedia , lookup
Stepper motor wikipedia , lookup
Distribution management system wikipedia , lookup
Rectiverter wikipedia , lookup
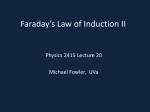
Flux – Motor Design Tool A key success factor for our MACCON customised motor designs 15.10.2014 1 Agenda First section of the presentation: -Showing 3 challenging projects which were helped to success by the unique features which Flux offers Second section of the presentation: - Calculation of magnetic losses for an axially segmented magnet arrangements, using a 2D model - Setting up a 3D model for a segmented magnetic arrangement - Discussion of the results of the 3D modelling with different segmentation lengths - Derivation/evaluation of an substitute 2D model using an substitute conductivity General remark: The pictures used in this presentation were taken from science projects and are not assigned for publications. 23.10.2014 2 First example: An optimization problem Problem description: An optical system for a space application should be protected by a screen against sunlight. The customer requests control electronics being as simple as possible. He intends to control each a transistor for the movement towards and a transistor in the reverse direction. For redundancy reasons a second pair of transistors and a redundant coil system should be used. In addition, the customer does not want to use a closed control with position feedback for this system. Since the folding arm has a large inertia together with the flap, the motion must absolutely run without jolting to avoid disturbances on the satellite. 23.10.2014 3 Example for an optimization problem Replacement design for the overview of the mechanical design of the flap unit: Design of the drive motor and winding: 30mm 60mm 15.10.2014 4 Example for an optimization problem Solution of the problem by means of Flux and GOT-It as well as Matlab-Simulink-coupling: GOT-It Matlab- Simulink Flux-Skewed Coil Main Final result of design: The different current profiles have the same characteristic; they are only differing in the amplitude Coil Redundant Damping Coil 15.10.2014 5 Second example: An acoustic noise optimization Problem description: In this project a special traction motor has to be designed for a driving application in the sea water. In addition to the specified driving loads, the acoustic noise excitation has to be minimized to assure that disturbance of marine life is reduced as much as possible. Therefore, the acoustic noise radiation of the surrounding mechanics which is transmitted from the electromagnetic tooth forces has to be minimized. This can be realized by having as much as possible difference between the frequencies of the electromagnetic induced forces on the stator tooth and the mechanical Eigen frequencies of the surrounding mechanics. To achieve this optimization, the forces on the stator tooth have to be analyzed by a Discrete Fourier transformation gained from the gap flux distribution. These results have to be compared to the mechanic modal analysis. 15.10.2014 6 Second example: An acoustic noise optimization On the one hand the frequencies spectrum of the excitation forces can be determined by Discrete Fourier transformation gained from the gap flux distribution. On the other hand, with the help of the mechanical mode analysis, it can be analyzed which of the wave forms are interacting with mechanics. By influencing the mechanical structure with regard to the excitation wave forms it can be obtained that the excitation level can be significantly decreased. Mechanical structure Result of air gap flux densities analysis which is used for the Discrete Fourier transformation along an air gap path: 23.10.2014 7 Second example: An acoustic noise optimization DFT calculation of magnetic air gap flux density: Circumferential nodes Frequency Calculation of magnetic force density: Mode B [T] 11 660 1.1939 33 1980 0.1624 13 661 0.1439 35 654 0.0908 37 664 11 77 Circumferential nodes Frequency 210788.19 44 2640 77156.96 24 1321 68367.49 0.0679 46 1314 43120.39 4905 0.0573 48 1324 32240.10 4621 0.0512 22 5565 27199.68 59 659 0.0440 3961 26991.00 99 5941 0.0400 66 1319 20912.25 61 665 0.0362 70 1325 17214.66 83 654 0.0304 72 1314 85 665 0.0291 94 14436.02 672 0.0278 1325 13828.27 7 96 654 0.0270 1332 13226.13 107 18 671 0.0244 16 1322 11224.69 109 662 0.0235 44 2638 9309.24 5 131 652 0.0217 46 2641 9301.43 55 3298 0.0196 20 1319 9301.43 121 7262 0.0195 66 3958 9217.97 133 670 0.0183 28 1327 7804.56 17 667 0.0164 20 2687 7521.58 155 658 0.0163 88 5281 7310.66 9 2027 0.0158 42 1320 7232.74 31 660 0.0152 30 1304 7032.02 22 σ~B^2/µ0 1 Frequency [Hz] 561.1 2 3 4 1357.1 1359.7 1546.2 5 1746.5 6 1753.2 7 8 9 2173.6 2175.8 2226.5 10 2228.5 11 2345.2 12 2369.1 13 2551.2 14 2770.5 σ [N/m²] 1320 19 644 0.0148 52 1338 5991.21 157 676 0.0131 68 2634 5866.43 41 678 0.0126 66 3960 5248.62 179 649 0.0112 48 1315 5198.15 29 656 0.0110 40 1316 4906.64 181 675 0.0089 4 1316 4386.28 70 2644 4386.28 15.10.2014 Results of the mechanical modal analysis: Description Axial vibration of rotor and bearing shield Vertical vibration of rotor Horizontal vibration of rotor Axial vibration of stator and housing Vertical 2 node vibration of stator and housing Horizontal 2 node vibration of stator and housing Yawing vibration of rotor Tilt vibration of rotor Tilting plus 2 node vibration of stator and housing Yawing plus 2 node vibration of stator and housing Circumferential 4 node vibration of stator and housing (1) Circumferential 4 node vibration of stator and housing (2) Torsional vibration of stator and housing on connectors side Vibration of connectors 8 Second example: An acoustic noise optimization Only at a frequency of approx. 1.3 kHz, one radial force with 4 nodes at the circumference is computed. This magnetic force calculation point has a frequency distance of more than 1 kHz to the corresponding natural modes of vibration and - in addition to this - a relatively small force amplitude of nearly 2% compared to the fundamental radial force density wave at f = 1320 Hz with 22 nodes at the circumference. Mode 12 Mode 11 Circumferential nodes 4 Frequency 1316 23.10.201415.10.2014 σ [N/m²] 4386.28 9 Second example: An acoustic noise optimization Example for 4 node oscillation: 15.10.2014 10 Second example: Multiphysics coupling between Flux and vibro-acoustic codes Multiphysics First target: Coupling between Flux and vibro-acoustic codes: LMS Virtual Lab, NASTRAN, … Currently working in the framework of a collaborative project >> With Renault, UTC, Vibratech, Adetel Command Electromagnetic forces Stator vibrations Noise Future Developments – V. Leconte 2012 Flux Conference - Rome, Italy, October 17-18, 2012 23.10.2014 11 Third example: System simulation with help of Flux / Portunus Problem description: In this project a special traction motor has to be designed for operating in a relatively high speed range (~3500 rpm) by a relatively low driving voltage (~300 VDC). Due to constructive restrictions it was not possible to choose a rotor design with embedded magnets. Consequently, the inductances of the motor could only be designed in a certain range. In addition to that, the power factor has to be designed in a certain range in order to assure that the supply battery is only in a certain load range. Due to this requirements it is very important to realize the possibility to set up a very good system simulation. Furthermore the thermal of the power electronics has to analyzed. 23.10.2014 12 Third example: System simulation with help of Flux / Portunus Structure of the system simulation: Park-TransFormation-block with controlling the id and iq-current Inverter-model with batterysupply Motor-model with motor parameters evaluated with Flux Id and Iq-current / voltage reference values for different filed weakening situations 23.10.2014 13 Third example: System simulation with help of Flux / Portunus Results of the simulation: Current ripples in the motor phase and current in the battery Result balance active power, apparent power and reactive power current-balance 23.10.2014 14 BREAK End of first section second section will follow in the afternoon 23.10.2014 15 Modelling with Flux in 3D for transient application / Derivation of a replacement method in 2D Working with Flux in 3D: - Some considerations about eddy currents - Setting up a 3D model for a SPM-motor in order to compute magnet losses for different axial segmentation lengths - Comparison of the 3D model with a 2D computation model - Derivation of a 3D model compared to computation of magnetic losses for different magnet segmentation length with only 2D computation by the help of a conductivity replacement factor 15.10.2014 16 Reasons for eddy current inductions Generation of eddy current losses in the magnets: Slotting of the stator Pulsation of the magnetic flux when current is supplied an electric machine with distributed winding (single tooth windings are muc more critical) Varying air gap length Reduction of the air gap induction under slot openings Harmonics of the stator field in the air gap Spatially fixed inductive dips (pulsation of the air gap field) upon rotation of the rotor Do not move synchronously with the rotor Eddy currents and consequently eddy current losses in the magnets Torque variations Current supply of the stator by an inverter By optimizing the inverter influence of harmonics can minimize optimized to sinusoidal current supply 15.10.2014 17 Modelling with Flux for a 2D of transient application Modelling of the magnet losses in 2D for a magnet segmentation in radial direction: High-value resistors to assure that the total current in each magnet segment is equal to zero Mesh structure for the surface magnet with an optimized FEM mesh 23.10.2014 18 Eddy current distribution Flux in 3D of transient application Result of the eddy-current computation in the magnet or a 2D model: Slotting induced eddy-current distribution for current supply Slotting induced eddy-current distribution without current supply High eddy current densities below the slots 23.10.2014 19 Modelling with Flux for a 2D of transient application Results of the modelling of the magnet losses in 2D for a magnet segmentation in radial direction and compared to an segmentation in axial direction: Increasing up the maximum speed up to 12000 rpm Exponentially increase of the eddy current losses l / n 25mm / 13,15mm 1,9 9 magnet segments in radial direction Very effective possibility of reducing Decreasing the losses by 44% 8 magnet segments in radial direction Stator outer diameter: 235 mm Active motor length: 30 mm Number of slots = 36 Poles = 4 23.10.2014 Additional loss reduction of 33% Overall loss reduction by axial and radial segmentation 63% 20 Analytic model for the rough estimation of the influence of the magnet segmentation Skin-effect causes elliptically eddy current paths with high eddy current densities in the edge areas Eddy-currents in the monolithic magnet Total losses will be changed in the ratio: SPEED's Electric Machines, Page 2.208 For the case that L is approximately pole-pitch τ: 23.10.2014 equal to the Radial segmentation is more effective 21 Modelling with Flux in 3D for a transient application Modelling in 3D of the magnet losses for different lengths of magnet segmentation: Mesh for the Magnets are transformed in z- direction by block mesh elements 23.10.2014 22 Modelling with Flux in 3D for a transient application Movie to show the preparation and results for the 3D model: 15.10.2014 23 Modelling with Flux in 3D of transient application Eddy current density distribution under load for different segmentation length: 3 times higher eddy current loss density 5 mm length of the magnet segments 15 mm length of the magnet segments 15.10.2014 24 Modelling with Flux in 3D of transient application Eddy current density distribution for no load case compared to the case under load: Eddy current densities for load case are doubled Eddy current density for the no load case 23.10.2014 Eddy current density for the load case 25 Modelling with Flux in 3D of transient application Eddy current penetration density for no load case compared to the case under load: No load case Load case - Depth of penetration (decreasing to 1/e-times) - Depth of penetration (decreasing to 1/e-times) is around 2.5 mm is around 4 mm - At 2.5 mm: Eddy current densities of 0.75*106 A/m2 - At 2.5 mm: Eddy current densities of 0.4*106 A/m2 - More volume of eddy currents is penetrated 15.10.2014 26 Modelling with Flux in 3D of transient application Comparison of the case with load and without load: Eddy currents penetrate by very complex paths the magnetic volume High tangential components of the eddy currents Corner regions are not penetrated by the elliptical eddy current paths Maximum eddy current densities are double for the load case compared to case without load For the load case the penetration depth of the eddy currents is ~40% more 15.10.2014 27 Modelling with Flux in 3D of transient application Derivation of an substitute 2D model using an substitute conductivity: N.Boules, W.-R.Canders und H.Weh. Analytische Bestimmung des Nutungseinflusses auf die Feldverteilung und Wirbelstromverluste in dauermagneterregten Synchronmaschinen. Archiv für Elektrotechnik 62 283-293. Springer-Verlag 1980. Braunschweig. Definition of the replacement conductivity: With : Factor for the finite extension of the magnets in the axial direction With : Finite extent in the azimuthal direction (~0,9) And with : conductivity of NdFeB-magnet material Kb-factor as function of magnet length divided by pole pitch 15.10.2014 Due to the segmentation of the magnets an increase of the conductivity of the magnets is occurring The increase of the conductivity can be derived by a correction factor * kb k i r j i * ( r 1) 2 i2 kb ki r i 1 jr tanh(ˆl / 2) 1 jr ( ˆl / 2) ˆ 1 jr n Example for this special motor design kb 0,64 l / n 25mm / 13,15mm 1,9 Reduction of the conductivity of 36% 28 Modelling with Flux in 3D of transient application Comparison of the 3D computation of the eddy current losses compared to 2D computation with the help of the evaluated kb-factor: 29 Below a magnet segmentation length of 20 mm the values of the 2D models are higher. But the deviation of the two approaches is in the maximum range of 10%. 23.10.2014 29 Modelling with Flux in 3D of transient application Comparison of the 3D computation of the eddy current losses compared to 2D computation with the help of the evaluated kb-factor: 2D- model 3D- model 30 The deviation of the two approaches is not significantly depending on the rotor speed. 23.10.2014 30 Thank you for your attention 23.10.201415.10.2014 31