Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Valve RF amplifier wikipedia , lookup
Tektronix analog oscilloscopes wikipedia , lookup
Radio direction finder wikipedia , lookup
Radio transmitter design wikipedia , lookup
Television standards conversion wikipedia , lookup
Oscilloscope wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Direction finding wikipedia , lookup
Phase-locked loop wikipedia , lookup
Broadcast television systems wikipedia , lookup
Opto-isolator wikipedia , lookup
Oscilloscope types wikipedia , lookup
Battle of the Beams wikipedia , lookup
Dynamic range compression wikipedia , lookup
Oscilloscope history wikipedia , lookup
Telecommunication wikipedia , lookup
Index of electronics articles wikipedia , lookup
Signal Corps (United States Army) wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Analog television wikipedia , lookup
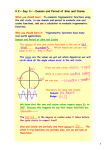
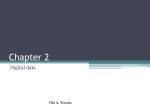
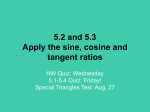
Ultrasound Physics & Instrumentation 4th Edition Volume I Companion Presentation Frank R. Miele Pegasus Lectures, Inc. Pegasus Lectures, Inc. COPYRIGHT 2006 License Agreement •This presentation is the sole property of •Pegasus Lectures, Inc. •No part of this presentation may be copied or used for any purpose other than as part of the partnership program as described in the license agreement. Materials within this presentation may not be used in any part or form outside of the partnership program. Failure to follow the license agreement is a violation of Federal Copyright Law. •All Copyright Laws Apply. Pegasus Lectures, Inc. COPYRIGHT 2006 Volume I Outline Chapter 1: Mathematics – Level 1 – Level 2 Chapter 2: Waves Chapter 3: Attenuation Chapter 4: Pulsed Wave Chapter 5: Transducers Chapter 6: System Operation Pegasus Lectures, Inc. COPYRIGHT 2006 Mathematics: Level 2 Pegasus Lectures, Inc. COPYRIGHT 2006 Chpt 1; Level 2 Material •Level 2 Mathematics delves into concepts of: – Non-linear relationships – Percentage Change – Logarithms – Trigonometry – The Binary System – A/D Conversion – Nyquist Criterion – Constructive and Destructive Interference Pegasus Lectures, Inc. COPYRIGHT 2006 Non-Linear Proportionality Increase by factor y = x2 of 4 A proportional relationship between variables in which if one variable increases by x%, the other variable increases by a different percentage. y 5 4 3 2 1 1 2 3 4 5 x Increase by factor of 2 The contrast between linear and non-linear growth should be stressed. Non-linear relationships express situations where very small changes in one parameter can result in significant changes in the related parameter. Most of the world behaves non-linearly such as growth of plants, spread of disease, perceived brightness with distance, etc… Non-linear Direct Relationships • Fig. 4: y = 3x2 (Pg 43) • Notice the same characteristic parabolic shape of the graph of 3x2 and x2. Notice that the constant term of 3 effects that overall value, but not the rate of growth. This fact can be seen by comparing this graph with the graph of the previous slide (y = x2). Notice that both graphs have the same characteristic shape. In both cases, if x is increased by a factor of 4, y increases by a factor of 16. The constant factor of three affects the absolute value but not the relative value. This is why both equations would lead us to stating that y is proportional to x squared. You should also note that how the data is graphed can lead to misperceptions. Note that in the previous slide, the y axis increases by ones (from zero to five) whereas this graph increases by tens (from zero to 90). As a result, the previous graph artificially “appears” to express a greater rate of change than this graph. Inverse Proportionality •Fig. 5: y = 3/x2 (Pg 44) Notice that in this case small increases in x produce more rapid decreases in y. Pegasus Lectures, Inc. Logarithms Logarithms are a compression scheme which yield a method for dealing with a very large range of data. log 10 100 = x 10x = 100 = 102 x=2 The mathematical approach to solving a logarithm is to go around a circle as shown above. The value of logarithms becomes clear in Chapter 6 when we discuss the need to compress the enormous dynamic range so that real-time imaging can be achieved. Without a means by which to compress the extraordinary range of signals that return from the body, we would need to use some type of technique in which we would have to view multiple images at varying greyscale levels. Also notice that the base used in this example is 10. It is clearly possible to use any base one desires, but since we generally use a counting system based on factors of 10 (decimal), the only logarithm the students are expected to know is base 10. However, the concept is exactly the same for all other bases. Logarithms • Fig. 6: Log Scale (Pg 51) Numbers are compressed more and more moving to the right on the graph. Using the above scale, it is easy to see that the log (base 10) of a power of 10 is simply the exponent. In other words, since 100 can be written as 102, the log of 100 is 2. It is helpful to point out the fact that reciprocals are clearly demonstrated by this graph (since the log of 100 is 2, the log of 1/100 is -2). It is also valuable to point out that as the we move farther up the graph, there is more and more compression (numbers become closer and closer together). In other words, logarithms are a non-linear method of displaying (graphing) data. Linear Scales • Fig. 7: Linear Scale (Pg 52) Numbers are uniformly distributed along the entire graph. In contrast to the log scale, a “distance” on the linear scale always represents an equal value. If one inch of a linear graph equals the value 7, then two inches equals the value of 14. Visualizing Compression by Logarithms • Fig. 8: Log Scale and the Log of 2 (Pg 52) Notice that on a logarithmic graph, the number 2 is farther from 1 than 3 is from 2, and 4 is even closer to 3 than to 2. Notice that the log of 2 must be greater then 0 and less than 1. The log of 2 is 0.3. Pegasus Lectures, Inc. COPYRIGHT 2006 Properties of Logarithms log x y log x log y x log log x log y y log (4) = log (2 2) = log (2) + log (2) = 0.3 + 0.3 = 0.6 log (20) = log (2 10) = log (2) + log (10) = 0.3 + 1.0 = 1.3 log (5) = log (10 2 ) = log (10) - log (2) = 1.0 – 0.3 = 0.7 Logarithms convert the operation of multiplication into addition. Not surprisingly, logarithms also convert division into subtraction (inverse operations). This fact is useful to solve logarithms of numbers that are not powers of 10. Pegasus Lectures, Inc. COPYRIGHT 2006 Properties of Logarithms log (4) = log (2 2) = log (2) + log (2) = 0.3 + 0.3 = 0.6 log (20) = log (2 10) = log (2) + log (10) = 0.3 + 1.0 = 1.3 log (5) = log (10 2 ) = log (10) - log (2) = 1.0 – 0.3 = 0.7 4 2 10-1 100 101 -1 0 1 20 5 102 2 0.6 0.3 Pegasus Lectures, Inc. COPYRIGHT 2006 103 0.7 3 1.3 Trigonometry and the Unit Circle • Fig. 9: Unit Circle (Pg 53) The use of the unit circle for trigonometry is extremely helpful. It is referred to as the unit circle since the length of the radius is 1, or 1 unit. This radius makes life easy since all cosine and sine values are referenced to the value of 1, making it easy to express percentages. Cosine of 0 Degrees • Fig. 12: Unit Circle It is important that the student learns the convention of how angles are measured. The angle is always measured relative to the x-axis. Notice that zero degrees aligns with the x-axis. Cosine(0) = 1 Pegasus Lectures, Inc. COPYRIGHT 2006 Cosine of 60 Degrees • Fig. 10: Unit Circle (Pg 54) Cosine(60) = 0.5 Again notice that the angle is measured relative to the x-axis. (60 degrees is 2/3 of the arc from 0 degrees and 90 degrees). When projecting to the x-axis, notice that the “shadow” produced on the x-axis is only 0.5, or 50%. Pegasus Lectures, Inc. COPYRIGHT 2006 Cosine of 90 Degrees • Fig. 13: Unit Circle (Pg 55) At 90 degrees, the projection of the angle with the circle back to the x-axis has a length of zero on the x-axis, so the cosine of 90 degrees is 0. Cosine(90) = 0 Pegasus Lectures, Inc. COPYRIGHT 2006 90 ° y .2 5 0 .2 5 .2 5 .5 .5 .7 5 . 5 .7 5 0° = 1360° x Angle ( ) Cos ( ) 0o 1 30 o 0.866 45 o 0.707 60 o 0.5 90 o 120 o 0 135 o -0.707 150 o -0.866 180 o -1 210 o -0.866 225 o -0.707 240 o -0.50 270 o 0 -0.50 1 .7 5 180 ° 1 0 .2 5 . 5 .7 5 1 Trigonometry (Cosine) 270 ° This slide is intended to show the students the cosine of the “basic” angles. Knowing the basic angles is useful since it provides a reference for estimating the cosine of “non-basic” angles. Notice that the basic angles are all relatively easily visualized on the unit circle. In this slide, the basic angles between 0 and 90 degrees (inclusively) are shown, but the cosine values are also given in the table for angles greater than 90 degrees. From this table it should be evident that 45 degrees is basically the “same” angle as 135 degrees, 225 degrees, and 315 degrees (not shown), just as 30 degrees is the same basic angle as 150 degrees, 210 degrees, and 330 degrees. Important points to note: 1. The angle is always measured with respect to the x-axis 2. The cosine is the projection of the intersection of the angle with the unit circle toward the x-axis. 3. The cosine decreases as the angle increases from 0 degrees to 90 degrees. 4. The cosine is positive for angles between 0 degrees and 90 degrees and between 270 degrees and 360 degrees 5. The cosine is negative for angles between 90 degrees and 270 degrees. Cosine (Animation) • (Pg 55) Pegasus Lectures, Inc. COPYRIGHT 2006 Sine of 60 Degrees • Fig. 11: Unit Circle (Pg 54) Sine(60) = 0.866 Like the cosine, the sine of an angle can be determined from intersecting the angle with the unit circle but then projecting towards and y-axis. Whereas the cosine is the projection to the x-axis, the sine is the projection to the y-axis. Because of the obvious circular symmetry, the sine of 60 degrees is the same as the cosine of 30 degrees. Angle ( ) Sin ( ) 0o 0 30 o 0.5 45 o 0.707 60 o 0.866 . 5 90 o 1 .2 5 Trigonometry (Sine) 120 o 0.866 135 o 0.707 150 o 0.5 180 o 0 210 o -0.5 225 o -0.707 240 o -0.866 270 o -1 90 ° .5 .25 0 .25 .7 5 .2 5 1 .7 5 .5 180 ° 1 0 .7 5 1 y 270 ° . 5 .7 5 0° = 1360° x As was done for the cosine, the basic angles are included together on one slide as well as within a table. Some important points to notice: 1. Notice that the angles are still specified relative to the x-axis. (Angles are always measured with respect to the x-axis) 2. The sine of 45 degrees is the same as the cosine of 45 degrees (45 degrees is halfway between the x-axis and y-axis – so the projection to the x-axis (cosine) and the projection to the y-axis (sine) must be equal. 3. The sine if positive between 0 degree and 180 degrees. 4. The sine is negative between 180 degrees and 360 degrees. Trigonometry 1 Amplitude 0.8 0.6 cosine 0.4 0.2 0 -0.2 90 180 360 -0.4 sine -0.6 -0.8 -1 Angle in Degrees Angle ( ) 0o 30 o 45 o 60 o 90 o 120 o 135 o 150 o 180 o 210 o 225 o 240 o 270 o Cos ( ) 1 0.866 0.707 0.5 0 -0.50 -0.707 -0.866 -1 -0.866 -0.707 -0.50 0 Sin( ) 0 0.5 0.707 0.866 1 0.866 0.707 0.50 0 -0.50 -0.707 -0.866 -1 Notice also that each time around the circle, the values repeat. Hence, when graphed, the graph shows periodicity (a characteristic of a wave). Graphing the Sine and the Cosine • Fig. 14: Graphical Representation of the Sine and Cosine Versus Angle • (Pg 55) Notice that there is a 90 degree phase shift between the sine and the cosine. This fact should not be surprising since the cosine is the projection to the x-axis and the sine is the projection to the y-axis. Since there are 90 degrees between the xaxis and the y-axis, there is a 90 degree phase shift between the sine and the cosine. Formal Trigonometric Relationships •Fig. 15: Trigonometric Relationship (Pg 56) adjacent cos hypotenuse sin opposite hypotenuse sin opposite tan cos adjacent These slides are added for completeness. Most math classes teach the trigonometric functions such as the sine and the cosine (tangent, secant, cosecant and cotangent) in terms of ratios of the opposite, adjacent, and hypotenuse sides of a right triangle. This slide is therefore intended to give the students a means by which to associate what they might have learned elsewhere with the approach illustrated through use of the unit circle. Defining Angular Quadrants • Fig. 16: Quadrants of a Circle (Pg 57) Often on the boards, the angles are referred to in terms of quadrants. Obviously the term quadrant refers to the fact that a “quadrant” represents a quarter of a circle, or 90 degrees. Since angles are measured counter-clockwise, the quadrants are also numbered counter-clockwise, as depicted in the figure above. Pegasus Lectures, Inc. COPYRIGHT 2006 Positive Cosines •Fig. 17: Cosine is Positive in Quadrant I and Quadrant IV (Pg 57) Understanding for what angles the cosine is positive and for what angles the cosine is negative is very important to be able to correctly identify flow direction (as will be seen in Chapter 7 on Doppler). Since the cosine is the projection towards the x-axis, the cosine is positive when the projection is on the positive portion of the x-axis, which occurs when the angle is between 0 and 90 degrees and when the angle is between 270 and 360 degrees. Negative Cosines • Fig. 18: Cosine is Negative in Quadrant II and Quadrant III (Pg 58) Similar to the last slide, the cosine is negative when the projection onto the xaxis is onto the negative portion of the x-axis which occurs when angles are between 90 degrees and 270 degrees. Analog Signals and Digital Conversion Signals measured coming from the patient are analog signals. For ease in processing and simplification of electronics, these analog signals are converted to digital signals. Analog signal are continuous in time. Digital signals are created by sampling an analog signal at discrete time intervals. The electronic device used for conversion is referred to as an analog to digital (A/D) converter. The rate at which the sampling is performed can affect whether the digital signal accurately represents the original analog signal. Faster signals require faster sampling. Pegasus Lectures, Inc. COPYRIGHT 2006 Low Frequency Analog Signal • Fig. 19: Slowly Varying Analog Signal (Pg 66) Higher Frequency Analog Signal • Fig. 20: Quickly Varying Analog Signal (Pg 66) In comparison to the last slide, notice how much faster the signal is varying with respect to time. This signal constitutes a higher frequency signal Analog to Digital Converter (A/D) • Fig. 23: An 8-bit A/D Converter (Pg 67)) The analog signal is input into the A/D converter. A clock is attached to the clock line which sets the conversion (sampling) rate. Every time the clock “ticks” the signal is sampled and output as a digital signal (in binary format). The smallest division of the A/D converter output is called a bit. The more bits, the higher the output dynamic range. Imagine if a converter only had one bit, there would only be two possible signal level outputs (on or off) or 1 and 0. Having more bits yields more combinations, thereby allowing the ability to specify more signal levels (higher dynamic range). Sampling an Analog Signal •Fig. 21: Graphical Representation of Sampling (Pg 67) Sampling Clock Notice that each time the clock “ticks” there is a “sample” taken of the analog signal. Between the clock ticks, there is no sampling and hence no record of how the signal is changing during these intervals. Analog to Digital Conversion A m p l i t u d e Every time the clock “ticks” the A/D converter samples the signal and outputs a digital value representing the amplitude of the signal. t2 t3 t4 t5 t6 t7 t9 t8 A/D Time Analog Input Signal “Sampling of a Slowly Varying Analog Signal” t1 t2 t3 t4 t5 t6 t7 t8 t9 Time Clock 8 bit Digital Output t1 “The Sampling Clock” This slide combines the pieces of the previous slides into one to show that the dynamic range of the digital signal is limited by the number of bits of the A/D converter. Sampled (Digital) Signal • Fig. 24: Graphical Representation of a Digital Signal (Pg 68) This slide graphically shows the digital signal and the fact that between each sample there is no information retained. In cases like this in which the signal is varying slowly, it is evident that not much information was lost ( as seen on the next slide). Reconstructing from a Digital Signal • Fig. 25: Reconstructed Signal (Pg 68) Ultimately the samples at discrete time intervals are reconnected to create the “reconstructed” signal. In this case, the reconstructed signal looks very similar to the original signal and hence accurately represents the original analog signal. Sampling a Higher Frequency Signal • Fig. 26: Sampling a Quickly Varying Analog Signal (Pg 69) This slide mimics the earlier slide showing how sampling of an analog signal occurs. This time, the analog signal is higher frequency (the signal changes faster with respect to time). Notice that the sampling rate is the same in this slide as it was with the lower frequency analog signal. This point will be important to understand the upcoming slides. Digital Signal Representation • Fig. 27: Graphical Representation of the Digital Signal (Pg 69) This slide mimics the earlier slide showing how sampling of an analog signal occurs. This time, the analog signal is higher frequency (the signal changes faster with respect to time). Notice that the sampling rate is the same in this slide as it was with the lower frequency analog signal. This point will be important to understand the upcoming slides. Reconstructing from the Digital Signal • Fig. 28: Reconstructed Signal (Pg 70) This slide shows the results of when the digital signal is reconstructed. Original versus Reconstructed Signal • Fig. 29: Reconstructed Versus Original Signal (Pg 70) Now we can clearly see the effect of sampling a higher frequency signal too slowly. Notice how the reconstructed signal has the basic trend of the original analog signal, but does not faithfully reproduce the quick variations (higher frequency components) of the signal. Note that the “poor” reproduction occurred even though the sample rate was the same as it was for the slower analog signal. Clearly, higher frequency signals require faster sampling for adequate reconstruction. This fact will lead to a desire to specify how fast a signal needs to be sampled to produce faithful reconstructions of the analog signal after sampling. This criterion is referred to as the Nyquist Criterion as shown on the next slide. Nyquist Criterion The Nyquist Criterion states that to avoid aliasing, the sample frequency must be at least twice as fast as the highest frequency in the signal you want to detect. f sampling (minimum) 2 f signal (maximum) Nyquist is valuable because it expresses the basic fact that what you see is not always reality. It is a good idea to have students answer some basic questions about the sampling rate and highest detectable frequency at this point (making sure to ask the question in both the forward and reciprocal direction) For example: If the sampling frequency is 20 kHz, what is the highest frequency signal that can be detected according to the Nyquist Criterion? (Answer 10 kHz) If the signal has a frequency of 20 kHz, what is the lowest sample rate possible for accurate detection based on the Nyquist Criterion (Answer 40 kHz) Pegasus Lectures, Inc. COPYRIGHT 2006 Determining Nyquist (2 Hz Signal) • Fig. 30: Analog Signal (Pg 72) This image is the first of three consecutive images that need to be considered together. This first image shows a 2 Hz signal (2 cycles per second). Pegasus Lectures, Inc. COPYRIGHT 2006 Sampling at 25 Hz • Fig. 31: Sampled Signal (Pg 72) This second image shows the resulting digital signal from sampling the 2 Hz signal at 25 Hz. Pegasus Lectures, Inc. COPYRIGHT 2006 Reconstruction (No Aliasing) • Fig. 32: Reconstructed Signal (Pg 72) This third slide shows the reconstructed signal by “connecting” the points of the digital signal. Notice that the correct 2 Hz signal is reconstructed. This was anticipated by the fact that the Nyquist criterion was satisfied. (A sampling rate of 25 Hz is clearly greater than 2 times 2 Hz). Pegasus Lectures, Inc. COPYRIGHT 2006 Sampling Too Slowly • Fig. 33: Analog Signal (Pg 73) In this case, the sample rate for the 2 Hz signal is only 2 Hz (which is lower than the 4 Hz dictated by Nyquist). Pegasus Lectures, Inc. COPYRIGHT 2006 Digital Signal From Sampling at 2 Hz • Fig. 34: Sampled Signal (Pg 73) Notice that the there are only two sample points in the digital signal. Pegasus Lectures, Inc. COPYRIGHT 2006 Reconstructed Signal is Aliased • Fig. 35: Reconstructed Signal (Pg 73) In this slide, the reconstructed signal is demonstrated. In marked contrast to the previous example, notice that Nyquist is not satisfied and the reconstructed signal frequency does not match the original analog signal (Aliasing). The reconstructed signal frequency that results is actually 0 Hz (clearly incorrect). Reconstructed Signal Not Aliased • Fig. 37: Sampled Signal (Pg 74) This example shows what happens when the 2 Hz signal is sampled at exactly the Nyquist limit of 4 Hz. Pegasus Lectures, Inc. COPYRIGHT 2006 Sampling at 4 Hz • Fig. 36: Analog Signal (Pg 74) This slide graphically demonstrates the digital signal that results from sampling the 2 Hz signal at 4 Hz. Pegasus Lectures, Inc. COPYRIGHT 2006 Nyquist Limit: Sample Twice as Fast • Fig. 38: Reconstructed Signal (Pg 74) Notice now, that the reconstructed signal frequency does match the original signal frequency of 2 Hz. Pegasus Lectures, Inc. COPYRIGHT 2006 Violation of Nyquist: Aliasing • Fig. 39: Aliasing (Pg 75) The sampling of this 9 Hz signal clearly does not meet the Nyquist criterion. Notice that the resulting reconstructed frequency is 2 Hz, clearly incongruous with the original 9 Hz signal. Pegasus Lectures, Inc. COPYRIGHT 2006 Wave Addition •Fig. 40: Two In Phase Waves (Pg 76) + “ In phase” implies that both waves reach a maxima and a minima at the same time. Notice that if these two waves were overlaid, they would appear as one wave. Constructive Interference • Fig. 41: Constructive Interference (Pg 77) If two or more in phase waves are created in the same physical region, the energy of the waves combines to construct one larger wave. In this case with two waves, the resultant wave has an amplitude twice as big as the original individual waves. Constructive interference is an important concept to understand how phased array transducers behave and are capable of steering and focusing. Destructive Interference • Fig. 42: Destructive Interference (Pg 77) In contrast to the previous case, these two waves are completely out of phase (180 degree phase shift). Two waves are considered purely out of phase when the maxima of one wave aligns with the minima of the other wave. The result is wave cancellation as shown referred to as destructive interference. Destructive interference is also very important in phased array operation. Ideally, to make a narrow beam, there would be pure constructive interference in a very narrow region along the direction of the beam and pure destructive interference everywhere else. Pegasus Lectures, Inc. COPYRIGHT 2006 Partial Constructive Interference • Fig. 43: Partial Constructive Interference (Pg 78) When two waves are not purely in phase or out of phase, partial constructive interference occurs. With partial constructive interference the waves add up only partially building a “bigger” wave, but not completely as the sum of the two waves. Most of the time, waves from elements from phased array transducers add partially constructively. Pegasus Lectures, Inc. COPYRIGHT 2006 Addition of Waves 2 1 1 0.75 -0.5 0.5 0 0.25 0.5 0 Amplitude 1.5 Constructive Interference -1 -1.5 -2 Time (sec) 1 0.5 Sum = 0 1 0.75 -0.25 0.5 0 0.25 0.25 0 Amplitude 0.75 Destructive Interference -0.5 -0.75 -1 Time (sec) 2 1 1 0.75 -0.5 0.5 0 0.25 0.5 0 Amplitude 1.5 Partial Constructive Interference -1 -1.5 -2 Time (sec) This slides recapitulates the previous three slides so that all three cases can be seen simultaneously. Notes