Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
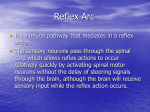
Movement on land Neuroethology Movement on land; reflexes and central pattern generators in the CNS; change of gait and its neural and energetic consequences. Jumping flying swimming. Evolution of neurons and behaviour; from ethology to neuroethology. Fly jump [last lecture] Integration of behaviour Books, CDs, Papers McNeill - Alexander R. Animal mechanics How Animals Move [CD Rom borrow in teaching] Biewener, AA (2003) Animal Locomotion OUP Library check Amazon Dickinson, M.H. et al 2000. How animals move: An integrative view. Science 288, 100-106. Aim Staying still resistance reflex Walking - and running neural control energetics mechanics coordination Muscle spindle main sense organ used maintain constant position Modified muscle cell innervated by g motoneurons and Ia afferents Resistance reflex Ia afferent excitatory loop from muscle spindle Schematic Resistance reflex - 2 inhibitory loop from muscle spindle to antagonistic muscle needs interposed interneuron interneuron Active movement in active movement, if a load is present, resistance reflex adds to motor command to make a stronger movement Primary motor cortex Summary so far resistance reflexes provide for stability feedback loop Central control Central pattern generator (CPG) Block sensory input (deafferentation) Stick insect: innervated denervated CPG Locusts flying, Clione swimming, tadpole swimming crustacean stomach cockroaches & cats walking feeding… Clione swimming Reciprocal inhibition excitation CPG http://neuromajor.ucr.edu/courses/Clione.mov Tadpole swimming in Xenopus tadpoles reciprocal inhibition + excitation Role of sensory input why have sensory input if CPG works anyway? initiate/end rhythm adjust speed of rhythm cycle by cycle feedback adjust pattern (gait) examples from crustacean stomatogastric ganglion ~40 neurons Initiate/end rhythm Simple : rhythm runs while stimulus is maintained Accelerate rhythm More complex : rhythm runs on after stimulus is maintained Cycle by cycle feedback Switch from stance to swing Babinski reflex Healthy adult reflex - curl toes Infant & damaged CNS spread toes Reflex reversal Zap Ia interneuron afferent Record motoneuron Stimulate brain (MLR) to induce locomotion Summary so far resistance reflexes provide for stability feedback loop Central pattern generation Sensory control Generating force =mass x acceleration measured in Newtons force delayed by elastic elements Muscles helped by Levers torque : force x distance 3 types Force / fulcrum / load Class 3 most common Each muscle contraction moves limb further than muscle contracts Hind legs more powerful push back on the ground, lift up tail (balance) some animals avoid using their front legs T rex kangaroos Power rate of working work = force x distance therefore power = force x speed measured in Watts litres O2 / kg /hour at rest, basic metabolic rate Metabolic rate basal metabolic rate determine from food ingested heat produced oxygen consumed 70 W (1 light bulb) Limits to power output <1sec 4500 W muscle output <2 min 1500 W anaerobic energy store kettle <2 hours 350 W oxygen transport All day 150W need to eat/sleep 2 light bulbs Walking and running You use more energy going faster uphill 1 kW 5 miles / hour Going uphill Extra work is force x distance up =10 J/kg if muscle efficiency is 20%, need 50J/kg Going faster... more energy need to go faster for most mammals horse Per meter? it might be the energy needed to move a particular distance Summary so far resistance reflexes provide for stability feedback loop Central pattern generation Levers help & hinder energy use increases with speed and gradient Change of gait Pictures by Muybridge, 1870 walking, trotting, cantering, galloping Why do we run? to keep foot on ground, circular acceleration must be less than gravity speed ^2 < gravity * radius speed < ( gravity * radius ) speed < ( 9.8 * 0.9) = 3m/s When do we run? This gives us the Froude Number F = speed ^2/(gravity * leg length) at 0.5 walk -> run [trot] at 2.5 trot -> gallop Gravity on moon 5 times less Children run sooner as they have shorter legs In running energy changes between potential energy elastic strain energy Achilles tendon stretches by 5% gives back 93% Achilles tendon In galloping second spring flexing the spinal cord with tendon above And Kangaroos hop... elastically Summary resistance reflexes provide for stability feedback loop Central pattern generation Levers help & hinder energy use increases with speed and gradient, but stays fixed per meter take off for running determined by gravity and leg length in running, energy stored in tendons