Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
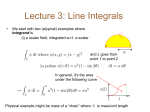
Multiplication of vectors Two different interactions (what’s the difference?) Scalar or dot product : A B | A || B | cos B A the calculation giving the work done by a force during a displacement work and hence energy are scalar quantities which arise from the multiplication of two vectors if A B 0 • The vector A is zero • Or The vector B is zero • Or = 90° A Axiˆ Ay ˆj Az kˆ B Bxiˆ By ˆj Bz kˆ A B Ax Bx Ay By Az Bz A B Vector or cross product : A B | A || B | sin nˆ n is the unit vector along the normal to the plane containing A and B and its positive direction is determined as the right-hand screw rule A B B A the magnitude of the vector product of A and B is equal to the area of the parallelogram formed by A and B if there is a force F acting at a point P with position vector r relative to an origin O, the moment of a force F about O is defined by : L r F If A B 0 • The vector A is zero • Or The vector B is zero • Or = 0° A B Commutative law : A B B A A B B A Distribution law : A (B C) A B A C A (B C) A B A C Associative law : A BC D ( A B)(C D) A BC ( A B)C A B C ( A B) C A ( B C ) ( A B) C Unit vector relationships It is frequently useful to resolve vectors into components along the axial directions in terms of the unit vectors i, j, and k. i× j = j×k = k×i = 0 i×i = j× j = k×k = 1 i×i = j× j = k×k = 0 i× j = k j×k = i k×i = j A Axiˆ Ay ˆj Az kˆ B Bxiˆ By ˆj Bz kˆ A B Ax Bx Ay By Az Bz iˆ A B Ax Bx ˆj Ay By kˆ Az Bz A B C Scalar triple product The magnitude of A B C is the volume of the parallelepiped with edges parallel to A, B, and C. AB C B A A B C A B C B C A B C A C A B [ A, B, C ] A B C Vector triple product The vector A B is perpendicular to the plane of A and B. When the further vector product with C is taken, the resulting vector must be perpendicular to A B and hence in the plane of A and B : ( A B) C mA nB where m and n are scalar constants to be determined. C ( A B) C mC A nC B 0 m C B n C A ( A B) C (C B) A (C A) B Since this equation is valid for any vectors A, B, and C Let A = i, B = C = j: 1 ( A B) C ( A C ) B ( B C ) A A ( B C ) ( A C ) B ( A B)C AB C B A Polar coordinate system: x r cos ; y r sin ; r x2 y 2 ; atan 2(y, x) r rrˆ unit vectors: rˆ cos xˆ sin yˆ ; ˆ sin xˆ cos yˆ; Remember to separate variables for integration calculations: r and should be integrated independently. . Move anything related to r into r’s integration, and move anything related to r into ’s integration… Please carefully observe the length of each small “cube” highlighted above. Vector integration Linear integrals Vector area and surface integrals Volume integrals An arbitrary path of integration can be specified by defining a variable position vector r such that its end point sweeps out the curve between P and Q Q dr r P A vector A can be integrated between two fixed points along the curve r : Q P Q A dr ( Ax dx Ay dy Az dz ) P Scalar product if A·B = 0 The vector A is zero or The vector B is zero or = 90° Work, force and displacement If the vector field is a force field and a particle at a point r experiences a force f, then the work done in moving the particle a distance r from r is defined as the displacement times the component of force opposing the displacement : W F r The total work done in moving the particle from P to Q is the sum of the increments along the path. As the increments tends to zero: Q W F dr P When this work done is independent of the path, the force field is “conservative”. Such a force field can be represented by the gradient of a scalar function : F W A When a scalar point function is used to represent a vector field, it is called a “potential” function : gravitational potential function (potential energy)……………….gravitational force field electric potential function ………………………………………..electrostatic force field magnetic potential function……………………………………….magnetic force field Two-dimensional system E E x i E y j dr dxi dyj Three dimensional system ndS dxdyk Q P Q E dr ( E x dx E y dy Ez dz ) P P Q Considering a surface S having element dS and curve C denotes the curve : We also have : The surface integral of the velocity vector u gives the net volumetric flow across the surface, which is called Flux. E dS E ndS u dS u ndS S Surface : a vector by reference to its boundary area : the maximum projected area of the element direction : normal to this plane of projection (right-hand screw rule) n dS ndS n is the normal direction of the surface. The surface integral is then : A E dS E ndS If E is a force field, the surface integral gives the total force acting on the surface. If E is the velocity vector, the surface integral gives the net volumetric flow across the surface. It is called “Flux”. n Flux: E dS EA E dS EA cos is the angle between the Vector and the normal direction of the surface When the Vector is “coming in”, Angle > 90 Flux <0 When the vector Is “going out”, Angle <90 Flux >0 When the vector is perpendicular to the surface, Angle =0. Flux is maximized. n E En E n = E cos cos cos(180 ) cos E n ds = - E ds cos Carefully go over the solutions of the 1st take home Math Quiz. Question 4-7