Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Singular-value decomposition wikipedia , lookup
Four-vector wikipedia , lookup
Perron–Frobenius theorem wikipedia , lookup
Non-negative matrix factorization wikipedia , lookup
Orthogonal matrix wikipedia , lookup
Matrix calculus wikipedia , lookup
Cayley–Hamilton theorem wikipedia , lookup
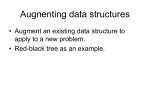
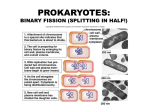
Part 3 Chapter 8 Linear Algebraic Equations and Matrices 1 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Review of Matrix Algebra Concepts • Let’s take a look at a problem that can be formulated using matrices 2 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Suppose there are three jumpers connected by bungee cords, so that each cord is fully extended, but unstretched. After they are released, gravity takes hold and the jumpers will eventually come to equilibrium Suppose you are asked to compute the displacement of each of the jumpers – that is x1, x2, x3. 3 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Free body diagrams Assume that each cord behaves like a linear spring, and follows Hooke’s Law 4 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Force Balance d 2 x1 m1 2 m1 g k2 ( x2 x1 ) k1 x1 0 dt d 2 x2 m2 2 m2 g k3 ( x3 x2 ) k2 x1 x2 0 dt d 2 x3 m3 2 m3 g k3 ( x2 x3 ) 0 dt Since the jumpers are at equilibrium the acceleration is equal to 0 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. 5 Rearrange to give 3 equations and….. 3 unknowns m1 g k2 ( x2 x1 ) k1 x1 0 m2 g k3 ( x3 x2 ) k2 x1 x2 0 m3 g k3 ( x2 x3 ) 0 6 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Which cansystem be solved using matrix Linear of equations algebra k1 k2 x1 k2 x2 m1 g k2 x1 k2 k3 x2 k3 x3 m2 g k3 x2 k3 x3 m3 g 7 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Matrix Algebra Applied Force Chapter 9 in MATLAB for Engineers 20 feet θ = 600 Pivot Point Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. F = 200 lbf In this chapter we’ll learn how to… • perform the basic operations of matrix algebra • solve simultaneous equations using MATLAB matrix operations Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. The difference between an array and a matrix • Most engineers use the two terms interchangeably • The only time you need to be concerned about the difference is when you perform matrix algebra calculations Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Arrays • Technically an array is an orderly grouping of information – Arrays can contain numeric information, but they can also contain character data, symbolic data etc. Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Matrix • The technical definition of a matrix is a twodimensional numeric array used in linear algebra • Not even all numeric arrays can precisely be called matrices - only those upon which you intend to perform linear transformations meet the strict definition of a matrix. Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Matrix Algebra • used extensively in engineering applications • Matrix algebra is different from the array calculations we have performed thus far Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Array Operators • A.* B multiplies each element in array A times the corresponding element in array B • A./B divides each element in array A by the corresponding element in array B • A.^B raises each element in array A to the power in the corresponding element of array B Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Operators used in Matrix Mathematics • • • • • Transpose Multiplication Division Exponentiation Left Division Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Some Matrix Algebra functions • • • • Dot products Cross products Inverse Determinants Covered in Applied Numerical Methods Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Transpose • In mathematics texts you will often see the transpose indicated with superscript T – AT • The MATLAB syntax for the transpose is – A' Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. The transpose switches the rows and columns 1 2 3 4 5 6 A 7 8 9 10 11 12 1 4 7 10 AT 2 5 8 11 3 6 9 12 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Using the transpose with complex numbers When used with complex numbers, the transpose operator returns the complex conjugate Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Dot Products • The dot product is sometimes called the scalar product • the sum of the results when you multiply two vectors together, element by element. Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. * * * || || || + + Equivalent statements Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Example 9.1 MATLAB for Engineers Calculating the Center of Gravity (Center of Mass) • Finding the center of gravity of a structure is important in a number of engineering applications • The location of the center of gravity can be calculated by dividing the system up into small components. Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. xW x1W1 x2W2 x3W3 etc... yW y1W1 y2W2 y3W3 etc... zW z1W1 z2W2 z3W3 etc... • In a rectangular coordinate system – x , y , and z are the coordinates of the center of gravity – W is the total mass of the system – x1, x2, and x3 etc are the x coordinates of each system component – y1, y2, and y3 etc are the y coordinates of each system component – z1, z2, and z3 etc are the z coordinates of each system component and – W1, W2, and W3 etc are the masses of each system component Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. In this example… • We’ll find the center of gravity of a small collection of the components used in a complex space vehicle Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Vehicle Component Locations and Mass Item x, meters y, meters z meters Mass Bolt 0.1 2 3 3.50 gram screw 1 1 1 1.50 gram nut 1.5 0.2 0.5 0.79 gram bracket 2 2 4 1.75 gram Formulate the problem using a dot product Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Input and Output • Input – Location of each component in an x-y-z coordinate system – in meters – Mass of each component, in grams • Output – Location of the center of gravity Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Hand Example Find the x coordinate of the center of gravity Item Bolt screw nut bracket sum x, meters 0.1 1 1.5 2 Mass, gram x 3.50 x 1.50 x * m, gram meters = 0.35 = 1.50 x 0.79 x 1.75 7.54 = 1.1850 = 3.5 6.535 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. We know that… • The x coordinate is equal to 3 x xm i 1 i mTotal i 3 xm i 1 3 i i m i 1 i1 • So… • x =6.535/7.54 = 0.8667 meters Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. This is a dot product Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. We could use a plot to evaluate our results Center of Gravity 4 z-axis 3 This plot was created using the interactive plotting tools Center of Gravity 2 1 0 2 2 1 y-axis 1 0 0 x-axis Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Matrix Multiplication • Similar to a dot product Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. • Matrix multiplication results in an array where each element is a dot product. • In general, the results are found by taking the dot product of each row in matrix A with each column in Matrix B Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. N Ci , j Ai ,k Bk , j k 1 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. • Because matrix multiplication is a series of dot products – the number of columns in matrix A must equal the number of rows in matrix B – For an mxn matrix multiplied by an nxp matrix These dimensions must match mxn nxp The resulting matrix will have these dimensions Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. We could use matrix multiplication to solve the problem in Example 9.1, in a single step Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Matrix Powers • Raising a matrix to a power is equivalent to multiplying it times itself the requisite number of times – A2 is the same as A*A – A3 is the same as A*A*A • Raising a matrix to a power requires it to have the name number of rows and columns Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Matrix Inverse • MATLAB offers two approaches – The matrix inverse function • inv(A) – Raising a matrix to the -1 power • A-1 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Equivalent approaches to finding the inverse of a matrix A matrix times its inverse is the identity matrix Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Not all matrices have an inverse • Called – Singular – Ill-conditioned matrices • Attempting to take the inverse of a singular matrix results in an error statement Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Determinants • Related to the matrix inverse • If the determinant is equal to 0, the matrix does not have an inverse • The MATLAB function to find a determinant is – det(A) Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. We’ll talk about determinants more in the next chapter of Applied Numerical Methods Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Cross Products • sometimes called vector products • the result of a cross product is a vector • always at right angles (normal) to the plane defined by the two input vectors – orthogonality Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Consider two vectors A Ax i Ay j Az k B Bx i B y j Bz k The cross product is equal to… A B ( Ay * Bz Az * B y )i ( Az * Bx Ax * Bz ) j ( Ax B y Ay Bx )k Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. i Ax Bx j Ay By k Az Bz j Ay By k Az Bz i Ax Bx k Az Bz i Ax Bx j Ay By A B ( Ay * Bz Az * B y )i ( Az * Bx Ax * Bz ) j ( Ax B y Ay Bx )k 45 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Cross Products are Widely Used • Cross products find wide use in statics, dynamics, fluid mechanics and electrical engineering problems Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Solutions to Systems of Linear Equations 3x 2 y x x z 10 3y 2 z 5 y z 1 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Using Matrix Nomenclature 3 2 1 x A 1 3 2 X y z 1 1 1 10 B 5 1 and AX=B Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Symbolically a11 a12 A a21 a22 a31 a32 a13 x1 b1 a23 X x2 B b2 b3 x3 a33 and AX=B Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. We can solve this problem using the matrix inverse approach This approach is easy to understand, but its not the most efficient computationally Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Matrix left division uses Gaussian elimination, which is much more efficient, and less prone to round-off error Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Example 8.2 Applied Numerical Methods Bungee Jumpers 53 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Linear System of 3 Equations k1 k2 x1 k2 x2 m1 g k2 x1 k2 k3 x2 k3 x3 m2 g k3 x2 k3 x3 m3 g Jumper Mass (kg) Spring Constant Unstretched Cord (N/m) Length (m) Top (1) 60 50 20 Middle (2) 70 100 20 Bottom (3) 80 50 20 54 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. 150 100 0 x1 588.6 100 150 50 x 686.7 2 0 50 50 x3 784.8 55 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. 56 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Solution using the matrix inverse strategy Solution using left division 57 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Linear Algebraic Equations find wide use in Engineering 58 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display.