Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Eisenstein's criterion wikipedia , lookup
Cubic function wikipedia , lookup
Quadratic equation wikipedia , lookup
Factorization wikipedia , lookup
Quartic function wikipedia , lookup
Elementary algebra wikipedia , lookup
History of algebra wikipedia , lookup
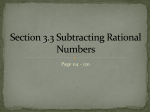
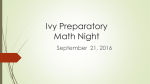
Chapter 8 Integration Techniques 8.1 Integration by Parts Slide 8 - 3 . Integrate by parts: Practice! http://www.math.ucdavis.edu/~kouba/CalcTwoDIRECTORY/intbypartsdirectory/IntByParts.html Slide 8 - 4 Slide 8 - 5 Slide 8 - 6 Slide 8 - 7 8.2 Trigonometric Integrals Slide 8 - 9 Slide 8 - 10 Slide 8 - 11 Slide 8 - 12 8.3 Trigonometric Substitutions Slide 8 - 14 Trigonometric Substitution In finding the area of a circle or an ellipse, an integral of the form dx arises, where a > 0. If it were the substitution u = a2 – x2 would be effective but, as it stands, dx is more difficult. Slide 8 - 15 Trigonometric Substitution If we change the variable from x to by the substitution x = a sin , then the identity 1 – sin2 = cos2 allows us to get rid of the root sign because Slide 8 - 16 Example 1 Evaluate Solution: Let x = 3 sin , where – /2 /2. Then dx = 3 cos d and (Note that cos 0 because – /2 /2.) Slide 8 - 17 Example 1 – Solution cont’ By Inverse Substitution we get: Slide 8 - 18 Example 1 – Solution Since this is an indefinite integral, we must return to thecont’ original variable x. This can be done either by using trigonometric identities to express cot in terms of sin = x/3 or by drawing a diagram, as in Figure 1, where is interpreted as an angle of a right triangle. sin = Figure 1 Slide 8 - 19 Example 1 – Solution cont’ Since sin = x/3, we label the opposite side and the hypotenuse as having lengths x and 3. Then the Pythagorean Theorem gives the length of the adjacent side as so we can simply read the value of cot from the figure: Slide 8 - 20 Example 1 – Solution cont’ Since sin = x/3, we have = sin–1(x/3) and so Slide 8 - 21 Slide 8 - 22 Slide 8 - 23 Example 2 Find Solution: Let x = 2 tan , – /2 < < /2. Then dx = 2 sec2 d and = = 2| sec | = 2 sec Slide 8 - 24 Example 2 – Solution cont’ Thus we have To evaluate this trigonometric integral we put everything in terms of sin and cos : Slide 8 - 25 Example 2 – Solution cont’ = Therefore, making the substitution u = sin , we have Slide 8 - 26 Example 2 – Solution cont’ Slide 8 - 27 Example 2 – Solution cont’ We use the figure below to determine that csc = so and Figure 3 Slide 8 - 28 Example 3 Find Solution: First we note that (4x2 + 9)3/2 = is appropriate. so trigonometric substitution Although is not quite one of the expressions in the table of trigonometric substitutions, it becomes one of them if we make the preliminary substitution u = 2x. Slide 8 - 29 Example 3 – Solution cont’ When we combine this with the tangent substitution, we have x = which gives and When x = 0, tan = 0, so = 0; when x = tan = so = /3. Slide 8 - 30 Example 3 – Solution cont’ Now we substitute u = cos so that du = –sin d. When = 0, u = 1; when = /3, u = Slide 8 - 31 Example 3 – Solution cont’ Therefore Slide 8 - 32 8.4 Partial Fractions Slide 8 - 34 Integration of Rational Functions by Partial Fractions To see how the method of partial fractions works in general, let’s consider a rational function where P and Q are polynomials. It’s possible to express f as a sum of simpler fractions provided that the degree of P is less than the degree of Q. Such a rational function is called proper. Slide 8 - 35 Integration of Rational Functions by Partial Fractions If f is improper, that is, deg(P) deg(Q), then we must take the preliminary step of dividing Q into P (by long division) until a remainder R (x) is obtained such that deg(R) < deg(Q). where S and R are also polynomials. Slide 8 - 36 Example 1 Find Solution: Since the degree of the numerator is greater than the degree of the denominator, we first perform the long division. This enables us to write: Slide 8 - 37 Integration of Rational Functions by Partial Fractions If f(x) = R (x)/Q (x) is a proper rational function: factor the denominator Q (x) as far as possible. Ex: if Q (x) = x4 – 16, we could factor it as Q (x) = (x2 – 4)(x2 + 4) = (x – 2)(x + 2)(x2 + 4) Slide 8 - 38 Integration of Rational Functions by Partial Fractions Next: express the proper rational function as a sum of partial fractions of the form or A theorem in algebra guarantees that it is always possible to do this. Four cases can occur. Slide 8 - 39 Integration of Rational Functions by Partial Fractions Case I The denominator Q (x) is a product of distinct linear factors. This means that we can write Q (x) = (a1x + b1)(a2x + b2) . . . (akx + bk) where no factor is repeated (and no factor is a constant multiple of another). Slide 8 - 40 Integration of Rational Functions by Partial Fractions In this case the partial fraction theorem states that there exist constants A1, A2, . . . , Ak such that These constants can be determined as in the next example. Slide 8 - 41 Example 2 Evaluate Solution: Since the degree of the numerator is less than the degree of the denominator, we don’t need to divide. We factor the denominator as 2x3 + 3x2 – 2x = x(2x2 + 3x – 2) = x(2x – 1)(x + 2) Slide 8 - 42 Example 2 – Solution Since the denominator has three distinct linear factors, the partial fraction decomposition of the integrand has the form To determine the values of A, B, and C, we multiply both sides of this equation by the product of the denominators, x(2x – 1)(x + 2), obtaining x2 + 2x – 1 = A(2x – 1)(x + 2) + Bx(x + 2) + Cx(2x – 1) Slide 8 - 43 Example 2 – Solution cont’ Expanding the right side and writing it in the standard form for polynomials, we get x2 + 2x – 1 = (2A + B + 2C)x2 + (3A + 2B – C)x – 2A These polynomials are identical, so their coefficients must be equal. The coefficient of x2 on the right side, 2A + B + 2C, must equal the coefficient of x2 on the left side— namely, 1. Likewise, the coefficients of x are equal and the constant terms are equal. Slide 8 - 44 Example 2 – Solution cont’ This gives the following system of equations for A, B, and C: 2A + B + 2C = 1 3A + 2B – C = 2 –2A = –1 Solving, we get, A = B= and C = and so Slide 8 - 45 Example 2 – Solution cont’ In integrating the middle term we have made the mental substitution u = 2x – 1, which gives du = 2 dx and dx = du. Slide 8 - 46 Note: We can use an alternative method to find the coefficients A, B and C. We can choose values of x that simplify the equation: x2 + 2x – 1 = A(2x – 1)(x + 2) + Bx(x + 2) + Cx(2x – 1) If we put x = 0, then the second and third terms on the right side vanish and the equation then becomes –2A = –1, or A = . Likewise, x = gives 5B/4 = so B = and C = and x = –2 gives 10C = –1, Slide 8 - 47 Integration of Rational Functions by Partial Fractions Case II: Q (x) is a product of linear factors, some of which are repeated. Suppose the first linear factor (a1x + b1) is repeated r times; that is, (a1x + b1)r occurs in the factorization of Q (x). Then instead of the single term A1/(a1x + b1) in the equation: we use Slide 8 - 48 Integration of Rational Functions by Partial Fractions Example, we could write Slide 8 - 49 Example 3 Find Solution: The first step is to divide. The result of long division is Slide 8 - 50 Example 3 – Solution cont’ The second step is to factor the denominator Q (x) = x3 – x2 – x + 1. Since Q (1) = 0, we know that x – 1 is a factor and we obtain x3 – x2 – x + 1 = (x – 1)(x2 – 1) = (x – 1)(x – 1)(x + 1) = (x – 1)2(x + 1) Slide 8 - 51 Example 3 – Solution cont’ Since the linear factor x – 1 occurs twice, the partial fraction decomposition is Multiplying by the least common denominator, (x – 1)2(x + 1), we get 4x = A (x – 1)(x + 1) + B (x + 1) + C (x – 1)2 Slide 8 - 52 Example 3 – Solution cont’ = (A + C)x2 + (B – 2C)x + (–A + B + C) Now we equate coefficients: A+C=0 B – 2C = 4 –A + B + C = 0 Slide 8 - 53 Example 3 – Solution cont’ Solving, we obtain A = 1, B = 2, and C = –1, so Slide 8 - 54 Integration of Rational Functions by Partial Fractions Case III: Q (x) contains irreducible quadratic factors, none of which is repeated. If Q (x) has the factor ax2 + bx + c, where b2 – 4ac < 0, then, in addition to the partial fractions, the expression for R (x)/Q (x) will have a term of the form where A and B are constants to be determined. Slide 8 - 55 Integration of Rational Functions by Partial Fractions Example: f (x) = x/[(x – 2)(x2 + 1)(x2 + 4)] has the partial fraction decomposition: Any term of the form: can be integrated by completing the square (if necessary) and using the formula Slide 8 - 56 Example 4 Evaluate Solution: Since the degree of the numerator is not less than the degree of the denominator, we first divide and obtain Slide 8 - 57 Example 4 – Solution cont’ Notice that the quadratic 4x2 – 4x + 3 is irreducible because its discriminant is b2 – 4ac = –32 < 0. This means it can’t be factored, so we don’t need to use the partial fraction technique. To integrate the given function we complete the square in the denominator: 4x2 – 4x + 3 = (2x – 1)2 + 2 This suggests that we make the substitution u = 2x – 1. Slide 8 - 58 Example 4 – Solution cont’ Then du = 2 dx and x = (u + 1), so Slide 8 - 59 Example 4 – Solution cont’ Slide 8 - 60 Note: Example 6 illustrates the general procedure for integrating a partial fraction of the form where b2 – 4ac < 0 We complete the square in the denominator and then make a substitution that brings the integral into the form Then the first integral is a logarithm and the second is expressed in terms of Slide 8 - 61 Integration of Rational Functions by Partial Fractions Case IV: Q (x) contains a repeated irreducible quadratic factor. If Q (x) has the factor (ax2 + bx + c)r, where b2 – 4ac < 0, then instead of the single partial fraction , the sum: occurs in the partial fraction decomposition of R (x)/Q (x). Each of the terms can be integrated by using a substitution or by first completing the square if necessary. Slide 8 - 62 Example 5 Evaluate Solution: The form of the partial fraction decomposition is Multiplying by x(x2 + 1)2, we have –x3 + 2x2 – x + 1 = A(x2 +1)2 + (Bx + C)x(x2 + 1) + (Dx + E)x Slide 8 - 63 Example 5 – Solution cont’ = A(x4 + 2x2 +1) + B(x4 + x2) + C(x3 + x) + Dx2 + Ex = (A + B)x4 + Cx3 + (2A + B + D)x2 + (C + E)x + A If we equate coefficients, we get the system A+B=0 C = –1 2A + B + D = 2 C + E = –1 A=1 which has the solution A = 1, B = –1, C = –1, D = 1 and E = 0. Slide 8 - 64 Example 5 – Solution cont’ Thus Slide 8 - 65 Slide 8 - 66 8.7 Improper Integrals Type 1: Infinite Intervals Slide 8 - 68 Slide 8 - 69 Examples: Slide 8 - 70 Practice Example: Determine whether the integral is convergent or divergent. Solution: According to part (a) of Definition 1, we have The limit does not exist as a finite number and so the Improper integral is divergent. Slide 8 - 71 Slide 8 - 72 Slide 8 - 73 Examples: Slide 8 - 74 Type 2: Discontinuous Integrands Suppose that f is a positive continuous function defined on a finite interval [a, b) but has a vertical asymptote at b. Let S be the unbounded region under the graph of f and above the x-axis between a and b. (For Type 1 integrals, the regions extended indefinitely in a horizontal direction. Here the region is infinite in a vertical direction.) The area of the part of S between a and t is Figure 7 Slide 8 - 75 Type 2: Discontinuous Integrands Slide 8 - 76 Practice Example: Find Solution: We note first that the given integral is improper because has the vertical asymptote x = 2. Since the infinite discontinuity occurs at the left endpoint of [2, 5], we use part (b) of Definition 3: Slide 8 - 77 Example – Solution cont’d Thus the given improper integral is convergent and, since the integrand is positive, we can interpret the value of the integral as the area of the shaded region. Figure 10 Slide 8 - 78 Gabriel’s Horn: Slide 8 - 79 8.8 Introduction to Differential Equations Ordinary Differential Equations Definition A differential equation is an equation containing an unknown function and its derivatives. Examples:.1. dy 2x 3 dx 2 d y dy 2. 3 ay 0 2 dx dx 4 3 3. d y dy 6y 3 3 dx dx y is the dependent variable and x is independent variable. Slide 8 - 81 Partial Differential Equation Examples: 1. 2u 2u 2 0 2 x y u is the dependent variable and x and y are independent variables. 2. 4u 4u 4 0 4 x t 3. 2 u 2 u u 2 2 t x t u is dependent variable and x and t are independent variables Slide 8 - 82 Order of a Differential Equation The order of the differential equation is the order of the highest derivative in the differential equation. Differential Equation ORDER dy 2x 3 dx 1 d2y dy 3 9y 0 2 dx dx 2 4 d y dy 6y 3 3 dx dx 3 3 Slide 8 - 83 Degree of Differential Equation The degree of a differential equation is the power of the highest order derivative term in the differential equation. Differential Equation d2y dy 3 ay 0 2 dx dx Degree 1 4 d 3 y dy 6y 3 3 dx dx 3 d 2 y dy 2 3 0 dx dx 1 5 3 Slide 8 - 84 Linear Differential Equation A differential equation is linear, if: 1. The dependent variable and its derivatives are of degree one, 2. The coefficient of any term does not contain the dependent variable, y. d2y dy 3 9 y 0. 2 dx dx Examples: d2y dy 3 9 y 0. dx dx 2 is linear. is non-linear because 3rd term contains y 4 d 3 y dy 6y 3 dx 3 dx is non-linear because the 2nd term is not of degree one. Slide 8 - 85 3. d2y dy 3 x y x dx dx 2 2 is non-linear because in the 2nd term the coefficient contains y. 4. dy sin y dx is non–linear because the coefficient on the left hand side contains y Slide 8 - 86 Solving Differential Equations 87 Slide 8 - 87 First Order Differential Equations The most general first order differential equation can be written as: There is no general formula for the solution. We will look at two types of these and how to solve them: Linear Equations Separable Equations Slide 8 - 88 Linear Differential Equations: Integrating Factor Method If not already in the following form, re-express the equation in the form: (1) where both p(t) and g(t) are continuous functions Assume there is a function, , called an integrating factor. Multiply each term in (1) by . This will give: Slide 8 - 89 NOW: assume that whatever is, it will satisfy the following : Do not worry about how we can find a is continuous we will find it! that will satisfy the above. As long as p(t) The equation becomes: We recognize that the left side is nothing more than the following product rule: Slide 8 - 90 The equation becomes: integrate both sides : Finally, the solution y(t) is: Slide 8 - 91 What is for any given equation ? We started with assuming: So: Finally: Slide 8 - 92 Practice Example: Solve with y(0) = 1. Step1: Compare the equation with the standard form: We identify: and . Step2: Find the integrating factor Step3: Multiplying through by the integrating factor, we get Step4: Rewrite as the derivative . . Step5: Integrate both sides with respect to x and get Step6: Use the initial condition to find c. So the solution to the problem is , gives: and finally: . Slide 8 - 93 Linear Differential Equations: Separable Equations A separable differential equation is any differential equation that we can write in the following form Now rewrite the differential equation as: Integrate both sides. Use the initial condition to find the constant of integration. Slide 8 - 94 Practice Example: Solve with y(0) = 1. Step1: Divide through by y. We get: Step2: Integrate both sides: Step3: Solving for y gives: where Step4: Use the initial condition: to get: A = 1 So the solution to the problem is: Slide 8 - 95 Examples from textbook: Slide 8 - 96 Example 2 (textbook) : Initial Value Problem Drug Dosing Slide 8 - 97 Example 3 (textbook) : Separable Equation Slide 8 - 98 Example 4 (textbook) : Separable Equation Logistic Population Growth Slide 8 - 99 Directional Fields: Reading assignment (for your general Math knowledge). Slide 8 - 100