Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
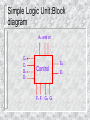
Compiling Communicating Processes into Delay-Insensitive VLSI Circuits Alain J. Martin Department of Computer Science California Institute of Technology Production Rule Production rules: if C then A if condition C is true then Perform action A Example: if A and B then C Production rule: A B C Production Rule • CMOS transistors can be modeled by a set of PRs. Example: inverter: a b a b Pull-up network a b Pull-down network Production Rule General Model • Pull-up network: a PR that makes z=true • Pull-down network: a PR that makes z=false Pull-up network Z Pull-down network Production Rule One-input operators: • Wire a b a b • Fork a b c a b c • inverter a b a b a b a b c a b Production Rule Two-input operators: 1 1 • And a b a b c c a b c 0 1 • OR a b ab c c a b c 0 0 Production Rule • Nand a b c a b c a b c 1 1 0 1 • Nor a b c ab c a b c 0 0 Production Rule • XOR a b c a b c • EQ a b c a b c a • C-element a b c a b c c b Production Rule • Switch a b c a b c a SW c b • SR-latch s q r q r s SR q q’ Production Rule Multi-input operators: • Multiplexer ( s a )( s b ) c ( s a )( s b ) c a b mux s c Arbiter:ME Arbiter *[[x u ;[x];u |y v ;[y]; v ]] 0 x u v y 0 Arbiter:ME • No request: x=0 y=0 ==> u=0 v=0 0 x 0 y 1 u0 v 0 0 1 0 Arbiter:ME • Request on x: x=1 y=0 ==> u=1 v=0 • Similar to request on y. 0 x 1 y 0 u1 v 0 0 1 0 Arbiter:ME • Request on both x and y: x=1 y=1 ==> either u=1 or v=1 • xu and yv will be both zero at some time • Depend on the race one of them will be 1. For example xu=0 propagates fast than yv 0 then yv will be locked at 1 and u=1 and v=0. xu x 1 u --> y v --> 1 yv 0 CHP: Compilation Method • CHP specification • Process decomposition • Handshaking expansion • Reshuffling • Production rule expansion • Circuit Implementation CHP: CHP specification *[ FETCH : i, pc := imem[pc], pc+1 [ off(i) -->offset, pc := imem[pc], pc+1; [] not off(i) -->skip ]; EXEC : [ alu(i) -->(reg[i.z], f) := aluf(reg[i.x], reg[i.y], i.op, f) [] ld(i) -->reg[i.z] := dmem[reg[i.x]+reg[i.y]] [] st(i) -->dmem[reg[i.x] + reg[i.y]] := reg[i.z] [] ldx(i) -->reg[i.z] := dmem[offset + reg[i.y]] [] stx(i) -->dmem[offset + reg[i.y]] := reg[i.z] [] lda(i) -->reg[i.z] := offset + reg[i.y] [] stpc(i) -->reg[i.z] := pc [] jmp(i) -->pc := reg[i.y] [] brch(i) -->[ cond(f, i.cc) -->pc := pc + offset [] not cond(f, i.cc) -->skip ] ] ] CHP: CHP specification • CPU: *[[Fetch; Exec]] • i:instruction being executed. • All instructions contain an op field. • The parameter fields depend on the types of instruct instruction for alu = record op : alu.15..alu.12 x : alu.11..alu.8 y : alu.7..alu.4 z : alu.3..alu.0 end Example. Add, and, …, load and store. CHP: CHP specification • f: flags generated by the execution of an alu instruction • cc: condition code field of branch instructions. • Memory: 1. imem: instruction memory 2. dmem: data memory • offset: two-word instructions • reg[0] always contains the value zero. • (z,f) := aluf(x,y,op,f) evaluate an alu instrution with the opcode op, parameters x,y current flag f. CHP: Process decomposition P P1 X Y P2 Chan(X,Y) P=BS;S;AS P1=BS;X;AS P2=*[[Y-->S;Y]] or (Y/S) call operator • S can be a selection, repetition or assignment command. CHP: Process decomposition P X P1 Y P2 Chan(X,Y) P=BS;S;AS P1=BS;X;AS P2=*[[Y-->S;Y]] or (Y/S) call operator • S is a selection • S [ B1 S 1[] B 2 S 2 ] P 2 *[[ Y B1 S 1;Y []Y B 2 S 2;Y ] CHP: Process decomposition P X P1 Y P2 Chan(X,Y) P=A;S;B P1=A;X;B • S is a repetition • S *[ B1 S 1[] B 2 S2] P 2 *[[ Y B1 S 1 []Y B 2 S2 []Y B1 B 2 Y ]] P2=*[[Y-->S;Y]] or (Y/S) call operator CHP: Process decomposition P X P1 Y P2 Chan(X,Y) P=BS;S;AS P1=BS;X;AS P2=*[[Y-->S;Y]] or (Y/S) call operator • S is an assignment (B is an arbitrary boolean function) • SxB P 2 *[[ Y B x []Y B x ]] CHP: Process decomposition • Process decomposition can reduce a process with an arbitrary control structure to a set of subprocesses of only two different types: • Sequences of communication actions • Repetition of the types shown in the previous 3 slides. CHP: Process decomposition • Example : Simple Logic Unit X Y SLU Z OP * [ OP ? op; [ op ( X ? x || Y ? y ); z : x y ; Z ! z []op ( X ? x || Y ? y ); z : x y ; Z ! z ]] CHP: Process decomposition * [ OP ? op ; [ op ( X ? x || Y ? y ); z : x y ; Z ! z []op ( X ? x || Y ? y ); z : x y ; Z ! z ]] * [ A; B ] || *[[ A OP ? op ; A ]] || *[[ B op ( X ? x || Y ? y ); z : x y ; Z ! z ; B [] B op ( X ? x || Y ? y ); z : x y ; Z ! z ; B ]] CHP: Process decomposition * [[ B op ( X ? x || Y ? y ); z : x y ; Z ! z ; B [] B op ( X ? x || Y ? y ); z : x y ; Z ! z ; B ]] * [[ B op ( C || D ); z : x y ; E ; B [] B op ( C || D ); z : x y ; E ; B ]] || *[[ C X ? x; C ]] || *[[ D Y ? y ; D ]] || *[[ E Z ! z ; E ]] CHP: Process decomposition * [[ B op ( C || D ); z : x y ; E ; B [] B op ( C || D ); z : x y ; E ; B ]] * [[ B op ( C || D ); F ; E ; B [] B op ( C || D ); G ; E ; B ]] || *[ [ F (x y) z ; F [] F ( x y) z ; F [] G (x y) z ; G [] G (x y) z ; G ] ] CHP: Process decomposition * [ A; B ] || *[[ A OP ? op ; A ]] || *[[ B op ( C || D ); F ; E ; B [] B op ( C || D ); G ; E ; B ]] || *[[ C X ? x ; C ]] || *[[ D Y ? y ; D ]] • Decomposed SLU || *[[ E Z ! z ; E ]] || *[ [ F (x y) z ; F [] F ( x y) z ; F [] G (x y) z ; G [] G (x y) z ; G ] ] CHP: Handshaking Expansion • Handshaking Expansion: P1 X Y x0 P2 P1 P2 xi P1 ; X ; yi yo P 2 ;Y ; P1 ; xo ; [ xi ]; P2 ; [ yi ]; yo ; • P1:Active P2: passive CHP: Handshaking Expansion • Handshaking Expansion: 2-phase P1 X Y x0 P2 P1 P2 xi P1 ; X ; yi yo P 2 ;Y ; P1 ; xo xo; [ xi xo ]; P 2 ; [ yi yo ]; yo yo; CHP: Handshaking Expansion • Handshaking Expansion: 4-phase P1 X Y x0 P2 P1 P2 xi P1 ; X ; yi yo P 2 ;Y ; P1 ; xo ; [ xi ]; xo ; [ xi ]; P2 ; [ yi ]; yo ; [ yi ]; yo ; • P1:Active P2: passive CHP: Handshaking Expansion • Handshaking Expansion: ao OP?op SLU * [ A; B ] ai || *[[ A OP ? op ; A ]] * [ ao ; [ ai ] ; ao [ai]; bo ; [bi]; bo [bi] ] || *[[ ao OP ? op ; ai ; [ ao ]; ai ]] CHP: Handshaking Expansion • Handshaking Expansion: bo (C||D);... SLU bi * [[ B op ( C || D ); F ; E ; B [] B op ( C || D ); G ; E ; B ]] * [[ bo op ( C || D ); F ; E ; bi ; [ bo ]; bi []boop ( C || D ); G ; E ; bi ; [ bo ]; bi ]] CHP: Reshuffling • ...; xo ; [ xi ];... ...; [ yi ]; yo ;... are only used to reset to zero they can be inserted anywhere as long as cyclic order is maintained. • WARNING: Reshuffling can introduce deadlock. • ...; xo ; [ xi ]; xo ; [ xi ]; S ;... ...; xo ; [ xi ]; S ; xo ; [ xi ];... does not introduce deadlock when: 1. S contains no communication action, or 2. X is an internal channel created by process decomposition CHP: Lazy-active protocol • Active protocol X: ...; xo ; [ xi ]; xo ; [ xi ];... • Passive protocol Y: ...; [ yi ]; yo ; [ yi ]; yo ;... • Lazy active protocol X: ...[ xi ]; xo ; [ xi ]; xo ;... 1.[ xi ] is postponed to next X command 2. First [ xi ] is vacuous. CHP: Reshulffling • Active protocol: * [ ao ; [ ai ] ; ao [ai]; bo ; [bi]; bo [bi] ] • Reshuffing * [ ao ; [ ai ] ; bo ; [bi] ;( ao || bo );( [ai] [bi] )] • Lazy active * [ [ai] ; ao ; [ ai ] ; [bi] ; bo ; [bi] ;( ao || bo )] Simple Logic Unit Simple Logic Unit:Block diagram OPreg OP A?(and,or) Control F C D X Y Xreg Yreg G E x y And/Or Unit z Zreg Z Simple Logic Unit:Block diagram Ao and or Co Ci Do Di Control Fo Fi Go Gi Eo Ei Simple Logic Unit: Simple Logic Unit: • Extracting the control signals: data transfer Simple Logic Unit: • Extracting the control signals: data operations Simple Logic Unit:Control HSE CHP: Production rule expansion • Production rule expansion: A. a handshaking expansion ==> a set of PRs B. consist of 3 Steps: state assignment, guard strengthening symmetrization CHP: Production rule expansion • state assignment: keep the execution sequence * [[li]; ro ; [ri]; ro ;[ri]; lo ;[li]; lo ] x li ro state ri ro assignment ri x li lo L/R li ro ri lo x ri lo li lo li x x ro x lo * [[li]; ro ; [ri]; x ;[x]; ro ;[ri]; lo ;[li]; x ;[x]; lo ] ro ri CHP: Production rule expansion • Symmetrization: Combinational vs state holding x li ro x li ro ri x li x x ri lo x ri lo li ro lo li x ri li x ri F/F x lo L/R ro ri