Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Trigonometric functions wikipedia , lookup
Euler angles wikipedia , lookup
History of geometry wikipedia , lookup
Möbius transformation wikipedia , lookup
Noether's theorem wikipedia , lookup
Rational trigonometry wikipedia , lookup
Four color theorem wikipedia , lookup
Brouwer fixed-point theorem wikipedia , lookup
Derivations of the Lorentz transformations wikipedia , lookup
History of trigonometry wikipedia , lookup
Integer triangle wikipedia , lookup
Line (geometry) wikipedia , lookup
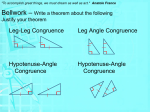
The New Approach to High School Geometry Required by Common Core Tom Sallee University of California, Davis BE SURE TO ASK QUESTIONS This talk is for you—not me. Most basic geometric question • What does it mean to say that two geometric figures or objects are “the same” Most basic geometric question • What does it mean to say that two geometric figures or objects are “the same”? Generally it means that they are “congruent” or at least “similar”. So what does “congruence” mean? • Discuss at your end of the table. • I REALLY don’t want to hear theorems quoted. Changes being required for geometry courses. Biggest one: rigid transformations are how you determine congruence. From CCSS-Math First Geometry Standards on Congruence • Experiment with transformations in the plane • Understand congruence in terms of rigid motions Mathematical Agenda Today • Topic 1 Look at relationships among various congruence and similarity transformations. • Topic 2 Use transformations to prove one or two standard theorems. Because this is not a formal math class • I am not going to be precise about the distinctions between a segment and the measure of its length and ditto with angles. I am trying to convey larger ideas and believe you can translate the occasional imprecision into what you need. Basic Motions • Reflection Across a Line • Dilation With Respect to a Point Reflections and Rigid Motions Will talk about dilations and similarity later. What is true about reflections (across a line)? Work with people to understand: • What they are. • What properties are preserved by reflections? • What properties are not? Postulate 1 • Every reflection preserves linearity, parallel lines, angles intersections and lengths. (and betweenness) Other Basic Motions Each of these is a product of reflections. Translations Rotations about a point We will not be considering glide reflections. Definitions • A rigid motion or rigid transformation (or congruence transformation) is the result of a sequence of reflections, rotations, and translations. • Two geometric figures are congruent if there exists a congruence transformation taking one exactly onto the other. Theorem 1 • Every congruence transformation preserves linearity, angles and lengths. • We are simply saying that since linearity, etc. is preserved at each step, it is preserved from beginning to end. What can we do with reflections? • Key point: If you know what happens to a single triangle in a congruence transformation you know what happens to the entire space. • For this course, we only care about congruence and similarity transformations. Congruence via reflections • If ABC and A’B’C’ are congruent triangles, can you find a single reflection that takes the point A to the point A’? Congruence via reflections • If ABC and A’B’C’ are congruent triangles, can you find a single reflection that takes A to A’? • If ABC and AB’C’ are congruent triangles [note A = A’ here, so the two triangles have a common vertex], can you find a single reflection that keeps A fixed and takes B to B’? Congruence via reflections • If ABC and A’B’C’ are congruent triangles, can you find a single reflection that takes A to A’? • If ABC and AB’C’ are congruent triangles [note A = A’ here, so the two triangles have a common vertex], can you find a single reflection that keeps A fixed and takes B to B’? • If ABC and ABC’ are congruent triangles [note A = A’ and B = B’ here, so the two triangles have a common edge], and C is not equal to C’, can you find a single reflection that keeps A and B fixed and takes C to C’? Theorem 3 Every congruence transformation is the product of at most 3 reflections. From reflections to other rigid motions • . What do reflections do to the plane? • In particular, are any points fixed by a reflection—i.e. don’t move? Points fixed by reflections Are any points fixed by a reflection across a line? • Answer: points are not moved by a reflection if and only if they are on the line. Reflections across intersecting lines • Are any points fixed by two reflections (in sequence) across intersecting lines? Discuss Reflections across intersecting lines • Answer: a point is fixed by a sequence of two reflections if and only if it is at the intersection of the lines. [One way is obvious; other way is also true but less obvious.] Only fixed point is intersection. • Set up coordinate system so that first line of reflection is the x-axis. Reflect first across it preserves x-value. Reflecting then across any other line will change x-value. Thus point will not have been fixed. So we get??? • A point is fixed by a sequence of two reflections if and only if it is at the intersection of the lines. What kinds of rigid motions keep exactly one point fixed? Theorem 5 The product of two reflections across two lines that intersect at C is a rotation about the center C. Reflections across parallel lines • What do you think happens if the lines are parallel? Theorem 6 The result of two reflections across parallel lines is a translation. Theorem 6 (improved) • Every translation is equivalent to two reflections across parallel lines that are perpendicular to the translation segment. The distance between these lines is half the translation distance. • The easiest pair to describe probably is where the first line is the perpendicular bisector of the segment and the second one is through the “proper” end of the segment. Theorem 5 (improved) • Every rotation is the product of two reflections across lines that intersect at the center of rotation. The angle between these lines is half the rotation angle. Essentially the same argument works. Again the easiest pair to describe is probably the one that takes the x-axis to where it will end up after the rotation and then to reflect around that line. New View of Congruence A standard triangle congruence theorem takes three (possibly separate) congruence transforms and replaces them by a single one that implies three other congruences. SAS Congruence • So SAS on the triangles ABC and DEF says that if there is one congruence transform that maps AB to DE, another congruence transform that maps angle B to angle E, and a third congruence transform that maps BC to EF, then there exists a single congruence transform that simultaneously takes A to D, B to E and C to F thereby showing the congruence of all corresponding sides and corresponding angles. Proof of SAS • You would think we had done it earlier in proof of Thm. 3, but we didn’t. There we made the assumption that we had the congruence of the conclusion, but that is what we need to find. Proof sketch of SAS Idea is similar. Take the congruence transformation that takes the rays that describe angle ABC to angle DEF. Call the image A’B’C’. Then B’ = E, and A’ lies along ray ED with B’A’ (that is, EA’) being congruent to BA and BA is given congruent to ED. Hence, EA’ is congruent to ED and thus, A’ = D. Similarly, C’ = F, so the triangle A’B’C’ is the triangle DEF and so ABC and DEF are congruent. What could possibly go wrong? Let’s see. What could possibly go wrong? Let’s see. Take the congruence transformation that takes the rays that describe angle ABC to angle DEF. Call the image A’B’C’. Then B’ = E, and A’ lies along ray ED. • We need to know that A’ is on this ray and not the other one. If A’ is on this ray, we still need to know why C’ is on the other one. What could go wrong-part 2? • Suppose we know that A’ lies along ray ED (and C’ lies on ray EF) with B’A’ (or EA’) congruent to BA and BA is congruent to ED so EA’ is congruent to ED • At some point we need to establish the transitivity of congruence. What could go wrong-part 3? • Then B’ = E, and A’ lies along ray ED with B’A’ (or EA’) congruent to BA and BA is congruent to ED so EA’ is congruent to ED and thus, A’ = D. • We also need to establish that if Z lies on the ray XY and that if XY is congruent to XZ, then Y = Z. So it is not as easy as we want. • It appears that Euclid was correct when he said to King Ptolemy, “There is no royal road to geometry,” and rigid motions is not that road. • The tradeoffs are among understandability, rigor, and destroying belief in the value of proof. [Why should a high schooler see the need to prove that angle ABC is congruent to angle CBA? It is a completely arbitrary exercise at this age.] To be purely rigorous We need to verify a lot of stuff that kids will not care about. Suppose all of these basic issues have been dealt with, then we are in good shape. Finally Back to dilations. Similarity transformations • What is going to be the difference between a congruence transformation and a similarity transformation? Discuss with someone near you. What is true about dilations? Work with people to understand: • What they are. • What properties are preserved by dilations? • What properties are not? Postulate 2 • Every dilation preserves linearity, parallel lines, angles intersections and ratios of lengths. (and betweenness) Definition • A similarity transformation is the result of a sequence of reflections, rotations, translations and dilations. • Two geometric figures are similar if … what?? Theorem 2 • Every similarity transformation preserves linearity, angles, and ratios of lengths. Same idea as before. How many dilations? • If a similarity transform involves two dilations, one that doubles distances and the other than multiplies by 3, is there a single dilation that can be used instead? How many dilations? • If a similarity transform involves two dilations, one that doubles distances and the other than multiplies by 3, is there a single dilation that can be used instead? • So we can always content ourselves with just worrying about a single dilation. (Basic proof—you have a similarity transform, so choose a triangle to transform and then look at its ultimate result.) Exploring similarity transforms. • Suppose triangles DEF and D’E’F’ are similar, what sequence of reflections and dilations could show this? • What would be your basic strategy? State the theorem • Theorem 4: Every similarity transformation is the product of ….. what? Theorem 4 Every similarity transformation is the product of at most 3 reflections and one dilation. AA and Side Ratios in Similar Triangles • By the way we defined similar figures, AA implies corresponding ratios of sides. • What about the converse? If two triangles have equal ratios of corresponding sides, they are similar. • Suppose ABC and A’B’C’ are two triangles such that AB/A’B’ = AC/A’C’ = BC/B’C’. Then AAA is true. If two triangles have equal ratios of corresponding sides, they are similar. • Suppose ABC and A’B’C’ are two triangles such that AB/A’B’ = AC/A’C’ = BC/B’C’. • Note that we can conclude other equalities. If AB/A’B’ = AC/A’C’, then AB/AC = A’B’/A’C’, etc. Sketch of proof Take a similarity transform of ABC centered at A to get A”B”C” so that A”C” is congruent to A’C’. [Probably should argue we know how to do this.] Then since by earlier argument, AC/A”C” = AB/A”B” we know that AC = A”C”, etc. so triangle ABC is congruent to triangle A”B”C” by SSS. Since ABC is similar to A’B’C’ and angles are reserved with both congruence transformations and similarity transformations, we know corresponding angles are equal. Questions? Before I move to a larger issue? Key Question: What proofs are worth doing? And what kinds of proofs? Your thoughts? Discuss. When are proofs worth doing? • My answer would be when they discover or validate something surprising. Examples: • • • • • Exterior Angle Theorem Inscribed Angle Theorem for Circles Law of Sines. Area of Circle = 0.5*r*circumference There are an infinite number of primes The battle over what a proof is • Must it be as rigorous as Euclid? [With the clear understanding that Euclid slipped up a lot on his basic assumptions, but was very good after that.] • What about demonstrations using Geogebra? Are these proofs? • What are we trying to do when we do proofs? My thoughts • We need to help everyone to learn to reason clearly and deductively. Mathematics is arguably the best place to do it—everyone agrees on correctness of answers (if not arguments). • It is also the place to learn that your assumptions decide your conclusions. More thoughts • Intuition is great. Most of science is done by making conjectures and validating. But people need to know that 3 or 10 examples are not enough. But a 1000 are certainly persuasive. • I wish high school math did more with programming—an even better place to learn to reason clearly.