Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE)
e-ISSN: 2278-1684, p-ISSN: 2320-334X
PP 36-40
www.iosrjournals.org
Experimental study on hybrid power combining solar energy and
animal energy for home lighting system
Sharad Kumar Chandrakar1, DK Yadav2, T Raghuwanshi3, R Sahu4
1,2,3,4
Mechanical, SSGI Bhilai, CSVTU Bhilai, India
ABSTRACT: In this paper a hybrid power system combining solar energy and animal energy is
experimentally studied to supply continuous power to home lighting applications. The solar system is used as
main energy source while the animal system is used as secondary or back-up energy source. This invention
provides animal powered mechanical device for prime mover to electric generator. Animal energy in form of
high-torque low-speed can be converted into low-torque high-speed through speed increaser to energize the
electric generator. A simple and cost effective charge control with dc–dc converters is used for maximum power
point tracking and hence maximum power extracting from the solar system. The results show that even when the
sun is not available; the system is reliable and available and it can supply high-quality power to the home
lighting applications by the animal powered system.
Keywords: Animal power, electric generation, hybrid system, solar power, speed increaser.
I. INTRODUCTION
Over 1.5 billion people rely on kerosene for light. Lack of suitable home lighting is directly linked to
illiteracy, poverty and health problems. The current widespread burning of kerosene also results in
environmental pollution. It is very difficult and very costly to available grid power everywhere specially at
remote isolated communities in developing countries but it is necessary of continuing energy supply. To achieve
this goal consists of using renewable energy sources, not only for large-scale energy production, but also for
stand-alone systems [1-3]. Solar energy is the most abundant, inexhaustible and clean of all the renewable
energy resources till date. The current–voltage (I-V) characteristic of a solar photovoltaic is given by Eq.(1).
The output characteristics of a solar PV are non-linear and are crucially influenced by the solar radiation,
temperature and load condition therefore it must be ensured that it operates at all time to provide maximum
power output. In this paper the voltage-based MPPT (dc–dc converter) technique have been used to track the
maximum power point of the PV array used [4 – 7].
𝐈𝐏𝐕 = 𝐧𝐩 𝐈𝐒𝐂 − 𝐧𝐩 𝐈𝐎 {𝐞𝐱𝐩[
𝐪 𝐕𝐏𝐕 +𝐑 𝐒 𝐈𝐏𝐕 .
].
𝐀𝐤𝐓𝐧𝐒
− 𝟏} − 𝐧𝐩
(𝐕𝐏𝐕 + 𝐑 𝐒 𝐈𝐏𝐕 )
𝐧𝐬 𝐑 𝐬𝐡
(1)
where VPV and IPV represent the output voltage and current of the solar cell, respectively; R s and Rsh are the
series and shunt resistance of the cell; q is the electron charge (1.6e -19 C); ISC is the light-generated current; IO is
the reverse saturation current; A is a dimensionless junction material factor; k is the Boltzmann constant (1.38e23
J/K); T is the temperature (K); np and ns are the number of cells connected in parallel and in series,
respectively.
In this paper authors introducing the animal power and human power as other forms of hybrid energy
system. The force exerted by a working animal is approximately equal to 10-12% of its live weight, and this
means for example, that a buffalo has a power output of about 300 W, or 5.4 MJ/d, if it is assumed that the
animal works for 5 h per day[8-10]. The methodology of animal power system is very simple. The device called
belan pulled by animal comprises of a mechanical link means provided with an extended pipe to transmit animal
power in form of high-torque low-speed to a speed increaser; a speed increaser provided with an input shaft
mounted with 68 teeth gear and an output shaft mounted with 15 teeth gear for converting human power
received from a mechanical link in the form of a high-torque low-speed to low-torque high-speed in four stages;
a belt and pulley system which is connected to the output shaft of the speed increaser for transmitting
mechanical energy in form of low -torque high- speed received from the speed increaser to generator; generator
to convert mechanical energy into electrical energy; and a storage system.
II. EXPERIMENT DETAILS
2.1 Solar Power system: The solar power of size 1000 Watt which has four solar panels of 250 Watt in series
was used in experiment which has been using by author for last two years. Solar panel is manufactured by Sova
Power Ltd. It has efficiency of more than 85%. Rated voltage is 34.85 V, Rated current is 7.19A, Open circuit
voltage (Voc) is 42.91V, Short circuit current (Isc) is 7.85A.
International Conference on Advances in Engineering & Technology – 2014 (ICAET-2014) 36 | Page
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE)
e-ISSN: 2278-1684, p-ISSN: 2320-334X
PP 36-40
www.iosrjournals.org
2.2 Battery system: Inverter Tubular Battery of 12V 180 AH is used. The maximum charging current should
not exceed 40 Amps. The system cut off voltage shall be at 14.4V and discharge cut off voltage10.8V.
2.3 Inverter: MRO-TEK‟s DSP based Sine wave Solar PCU with state of the art technology is used:
Inverter Model
Output voltage (VAC)
Output power (VA/Watt)
Output frequency (Hz)
Output current (Amps)
Efficiency (%)
Battery voltage (V)
NS 1024S+
230±10%
1000/1000
49-51
15A
85%
24
MPPT Model
Battery charging current
Max solar input power
Peak charge efficiency
Max solar open circuit volt
NS 1024S+
40 A
1000 Watt
95%
85
2.4 Draught animal: The authors‟ main object is to use the animal power for generating electricity for domestic
and agriculture use. For this experimental study authors used the pair of bullocks. The weights of bullocks are
456 kg and 478 kg. The mechanical link is fitted with a device pulled by pair of bullocks called bellan which is
made of wood and has the weight of 105 kg.
2.5 Speed increaser: Speed increaser is a four set of spur gears housed in a frame of mild steel angles having
690 mm × 690 mm at the top and 780 mm × 780 mm at bottom. It is having 4 numbers of stages with gear ratio
of 1:4.5. Input shaft of the speed increaser having 50 mm diameter and 600 mm length of mild steel material is
in vertical position whereas output shaft having 50 mm diameter and 450 mm length of mild steel material of the
same is also in vertical position. The shafts are supported with taper roller bearings at top and bottom. Bearings
are fastened on tie-bars which are welded on frame. Speed increaser is specially used for transmitting and
converting low-speed high torque to high-speed low–torque.
2.6 Belt and Pulley transmission unit: The final speed increasing is done by using belt and pulley system. One
pulley of 228.6mm (9 inch) was mounted on the output shaft of the speed riser and counter pulley was mounted
on car alternator having 76.2mm(3 inch) thereby stepping up the speed in the ratio 1: 3 when connected with
toothed belt. According to Indian Standard Code (IS: 2494-1974), the A type of belt is selected which has power
ranges 0.7kW – 3.5 KW.
2.7 Generator: In this experimental study authors select the car alternator to generate electricity. Lucas-TVS
car alternator of 12V 95AH and 12V 75AH were used.
2.8 Home lighting system: This inventions main object is to produce power for home lighting at rural and
isolated remote areas where population rely on kerosene for lighting. This system consisting following home
appliance with power required.
Home Appliance
load per unit
Quantity
Min Time
Max Time Min Total Max Total
Load
Load
CFL Bulb
25×4=100W
4
4 hr
8 hr
400W
800W
Ceiling fan
75W
1
4 hr
8 hr
300W
600W
Plasma TV
125W
1
2 hr
4 hr
250W
500W
Computer
150W
1
2 hr
4 hr
300W
600W
Mobile Charger
40W
1
5 hr
10 hr
200W
400W
Radio
50W
1
1hr
2hr
50W
100W
Total Power
540W
1500W
3000W
2.9 Gears: Four sets of spur gears transmits the power among parallel shafts. The spur gears are made of cast
iron having module 5 mm. the spur gears has 68 teeth while the spur pinions has 15 teeth. The pressure angle is
20 degree and outside diameters are 350mm and 85mm respectively. The speed ratio of 1:4.5 is obtained in
single stage. The geometric detailed and strength calculation for cast iron spur gear.
Geometric details of desired spur gear [11]
Strength calculation for spur gear [11]
• Module (m) = 5 mm,
Addendum = 1 module,
Dedendum = 1.157*module
Pressure angle (α) = 20 degrees
Tooth thickness (t) =1.571 * module
= 1.571*5 = 7.855mm
Using Lewis equation [11]
Tangential load F = σb*y*Pc*b
Where „σb‟ is the allowable stress,
„y‟ is the Lewis form factor y=0.1034,
„Pc‟ (Circular pitch) = π * module,
b‟ is the face width of the gears,
International Conference on Advances in Engineering & Technology – 2014 (ICAET-2014) 37 | Page
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE)
e-ISSN: 2278-1684, p-ISSN: 2320-334X
PP 36-40
www.iosrjournals.org
Whole depth = 2.25 * module
• Face width (b) = 5.4 * module =
b = 5.4*5 = 27mm.
• Fillet radius = 3.9 * module
• No of teeth (z) = 68 and 15
Pitch circle diameter (pcd) = z*m
= 68*5 = 340mm and 15*5 = 75mm
Outside diameter = (z+2)*m
= 350mm and 85mm
„d‟is the pitch circle diameter of the gear.
F = 2*500 = 1000N
putting in Lewis equation
1000 = σb*0.1034*(π*5)*27
σb = 22.81N/mm2
σall of Cast iron (high grade) = σut/3
= 320/3 = 106.67 N/mm2 > 22.8 N/mm2
According to [8-10] an animal (bullock) can applied the tangential force of 500N (F=2*500=1000N). and
ultimate strength of cast iron is 320 N/mm2[11].
III. FABRICATION AND PROCEDURE
The fabrication of speed increaser was done very carefully because there are five vertical shafts which
are supported by taper roller bearing. The bearing covers were fitted with the help of nut and bolt on the mild
steel ties, which are welded on the frame at top and bottom. Collars are provided at bottoms of shaft to support
the load on bearings. Gears are fitted by means of nuts by driling two holes on the shafts and on gear houges.
There are four step gear transmission system. The first gear of 68 teeth was mounted on first shaft at 20mm from
the color which meshes with the second gear having 15 teeth mounted on second shaft at 20mm above from the
collar. The third having 68 teeth was mounted on second shaft 50mm above the second gear and meshes with
the fourth gear having 15 teeth which was mounted on third shaft at the same height. The fifth gear having 68
teeth was monthed on third shaft 50mm above the fourth gear and meshes with the sixth gear having 15 teeth
which was mounted on the fourth shaft at the same height. The seventh gear having 68 teeth was mounted on
fourth shaft 50mm above the sixth gear and meshes with the eighth gear having 15 teeth which was mounted on
fifth shaft at same height. The pulley of 228.6mm was mounted on fifth shaft at 200mm from the bottom which
drive the another pulley of 76.2mm mounted on alternator and alternator was fabricated on the frame with the
help of mechanical linkage.
If bullock rotates at radial distance (r) of 2.5 m from the main shaft (first gear) then the distance at one
revolution is 15.7 m (2× π × 2.5). And the distance cover in one minute by bullock is 1 × 60 = 60 m. Hence the
initial rpm is 3.82(60/15.7). Due to compactibility and resources available author select the gears used in
sugarcane juice machine of speed ratio 4.5. Four stage gear system is used. Output rpm is increased by using
pulley and belt which has speed ratio 3. So that the rpm of output gear according to S S Ratan[12].
𝑁8
𝑁1
=
𝑍1
𝑍2
𝑍
𝑍
𝑍
× 𝑍3 × 𝑍5 × 𝑍7
4
6
8
(2)
(Nf)g = 3.82*4.5*4.5*4.5*4.5*4.5 ≈ 1567 rpm.
The mechanical link GI pipe was fitted with the first shaft of speed increaser by means of elbo and nutbolt at one end and another end was coupled on belan with the help of GI wire such that the center of belan
coincide at 2500mm of mechanical link. The speed increaser was fixed in the pit of 780mm×780mm×300mm.
The bullock pair was harnessed with traditional means. The shephered applied the force the bullocks started
moving into the circular path and also the belan along with mechanical link rotate the first shaft of the speed
increaser. At the starting the rpm was very low hence the alternator was not responding but as well as speed
was increasing the alternator start to generating power. Bullocks were need to applied force time to time to
maintain average speed. The rpm and generated volt & current were taken after every four minutes.The batteries
were 50% charged and it took approximate 2 hours to charge fully(multimeter indicate 12.6V). In first two
experiments the automotive battery of 12V 150AH was charged with animal power system and connected in
series to the 1000VA inverter and 540W load subjecjected to inverter. Next two experiment the tubular battery
of 12V 180AH was charged with animal power system and connected in series to the inverter. Same time the
solar system charged the tubular battery using MPPT technology (also dc-dc convertor) and 540W load
connected with this tubular batteries through inverter.
International Conference on Advances in Engineering & Technology – 2014 (ICAET-2014) 38 | Page
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE)
e-ISSN: 2278-1684, p-ISSN: 2320-334X
PP 36-40
www.iosrjournals.org
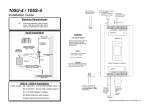
Fig 3: Bullocks powered mechanical device
for generating electric power.
Fig 4: Parallel combination of animal
power and solar power of 250W.
IV. RESULTS AND DISCUSSION
The animals‟ effort and speed depend on the load subjected and force applied by shepherd. Animal
speed is change very quickly and abruptly. It is very difficult to taking speed reading continuously because
animals got puzzled. The readings were taken after every four minutes within one hour. Speed vs. Current
shows that at low rpm at starting of animal motion it is not generating current by both alternator, but as well as
rpm is increasing and reaches to ideal working rang alternators producing high value of currents. Alternator
generates constant voltage of 12V as specified after reaching ideal speed. Fully charged battery shows 12.6V.
The time taken by solar system to charge the battery is depend on atmosphere temperature. Since MPPT
technology is used to charge controlle battery get the constant valtage. Normaly 12V 180Amps tubular battery
is charged in 7–10 hours because temperatue is vary from morning to evening. But when tubular battery was
charged using animal powered alternator of TVS-Lucas 12V 75AH which generate 36Amps it took 2 hour to
fully charge from 50% state of charge. Tubular battery can not be charged using alternator of 12V 95Amps
because of high charging current but 12V 150Amps automotive battery took 2 hours to charge.
When 540W load subjected with automotive battery through inverter it delivers power very efficiently and
worked for 4 hours 30 minutes. Same time tubular battery worked for 5 hour 25 minutes. Finally charged
tubular batteries by solar power and animal power were connected in series individually after then connected
parallel to the inverter and delivered power to 540W load for 9 hours 36 minutes(average). Authors also done
combine experiment during charging batteries by animal power and solar power of 250W and found that fan of
1 hp is running efficiently. Hence solar power and animal power are good combination for home lighting
system.
WORKING HOUR
10.5
10
9.5
WORKING HOUR
9
0
1
2
3
4
5
6
7
8
Fig 5: Working hours when 540W load subjected to hybrid power system.
V. CONCLUSION
The present work provides a system and method for producing electricity for home lighting system
using the biological energy of the muscles of animals like bullock by means of a mechanical device. The project
goal was to combining the solar power and animal power for home lighting which can work when even sun is
not available. This goal had to be met within the constraints of a low production cost and high safety. The
project has to offer a durable product with relatively good efficiency and emission free system.This is also
concluded that animals are the great energy source for generating power even having low speed.
International Conference on Advances in Engineering & Technology – 2014 (ICAET-2014) 39 | Page
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE)
e-ISSN: 2278-1684, p-ISSN: 2320-334X
PP 36-40
www.iosrjournals.org
REFERENCES
Zhou W, Lou C, Li Z, Lu L, Yang H. “Current status of research on optimum sizing of stand-alone hybrid solar-wind power generation
systems” Applied Energy, 87(2), 2010, 380–389.
Strupczewskim A. “Accident risks in nuclear-power plants.” Applied Energy, 75(1–2), 2003, 79–86.
Skoglund A, Leijon M, Rehn A, Lindahl M, Waters R. “On the physics of power, energy and economics of renewable electric energy
sources-Part II” Renewable Energy, 35(8), 2010, 1735–40.
Piegari L, Rizzo. “Adaptive perturb and observe algorithm for photovoltaic maximum power point tracking” IET Renewable Power
Generation,4, 2010, 317 - 28.
Nguyen DD, Lehman B. “Modeling and simulation of solar PV arrays under changing illumination conditions” In: Proc. IEEE compel
workshop. Trou, NY, USA: Rensselaer Polytechnic Institute; July 2006, 295 - 9.
Jewell WT, Unruh TD. “Limits on cloud-induced fluctuation in photovoltaic generation” IEEE Transactions on Energy Conversion ,5,
1990, 8 - 14.
Salameh Z, Dagher F, Lynch WA. “Step - down maximum power point tracker for photovoltaic system” Solar Energy,46, 1991, 278 82.
Fuller R. J., Aye LU,2012, “Human and animal power – The forgotten renewables” Renewable Energy 48, 2012, 326-332.
Draught animals. From (http://www2.sjsu.edu/faculty/watkins/animalpower.htm) Metric conversion by Tim Lovett.
Tiwari PS, Gite LP, Pandey MM, Shrivastava AK. Pedal power for occupational activities: effect of power output and pedaling rate on
physiological responses. International Journal of industrial Ergonimics ,41(3), 2011, 261 – 7.
Bhandari, V. B. “Design of Machine Elements” (Tata McGraw-Hill).
Ratan S S. “Theory of Machines” (Tata McGraw-Hill).
International Conference on Advances in Engineering & Technology – 2014 (ICAET-2014) 40 | Page