Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
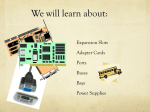
ECE200 – Computer Organization Chapter 8 – Interfacing Processors and Peripherals Chapter 7 versus Chapter 8 views Chapter 7 covered the high-level interface between memory and I/O Chapter 8 covers the nitty-gritty details of getting data in and out of I/O devices You are only responsible for the subset of Chapter 8 that we cover in class The big picture Memory-I/O bus handles data and communication between the CPU, memory, and I/O Bus basics A bus consists of A set of wires over which data and bus commands are transferred Communication protocols for determining bus ownership, (which device can currently use the bus), bus commands, and responses to commands To use the bus, a device (cache, memory, or I/O) must first arbitrate for the usage of the bus in order to get exclusive usage for the required time period A bus operation may consist of sending Bus commands (e.g., read, write) Addresses (e.g., of the memory location to read or write) Data (e.g., to be returned in response to a read command) Split transaction bus The bus is free for other uses after a command that requires a response is sent over the bus Example L2 cache miss occurs L2 cache gains control of the bus, and then sends a request to MM for the block MM receives the request and starts the access, during which the bus is free for other uses When the MM has completed the access, it arbitrates for the bus, and then sends the requested data to the L2 cache Implementation of a split transaction bus is very complicated! Most memory-I/O buses in laptop/desktop/server systems are split transaction and 64-256 bits wide (for data) The OS and I/O User programs request I/O services through system call exceptions to the OS The OS provides the low-level software routines (drivers) that send commands to the I/O device and read status back Multiple programs need to share I/O services and need them to be protected from each other Communicating with an I/O device The CPU sends commands to the I/O device over the memory-I/O bus and reads status back Approach 1: memory-mapped I/O A portion of the memory address space is reserved for sending commands (as store instructions) and reading status (as load instructions) The reserved pages are designated as non-cacheable so that they bypass the caches The memory addresses are ignored by the main memory Particular addresses are reserved for particular devices User programs cannot use these instructions, only the OS Used by MIPS and many others Approach 2: special privileged I/O instructions are defined in the ISA Used by X86 Checking device status The OS needs to know when an I/O action (e.g., mouse movement, printer done) has occurred With polling, the OS periodically reads the device status registers to check if particular status bits have been set by the device In interrupt-driven I/O, the device raises an interrupt (exception) when it has taken some action The OS determines the device through the exception information and takes action Useful for devices with high data rates (e.g., disks) for which the overhead of polling would be prohibitive Data transfer between I/O and memory Simplest approach is for the CPU to perform the data transfer through load and store operations (assuming memory-mapped I/O) CPU determines either through polling or interrupts that the transfer is done and another can occur load store Data transfer between I/O and memory A common higher performance alternative is direct memory access (DMA) in which the device directly transfers data to/from memory without CPU intervention DMA operation Processor provides to the DMA device the number of bytes to transfer, the memory address, and the operation to be performed DMA operation The device performs the transfer over the memory-I/O bus to or from memory DMA operation The device interrupts the processor DMA operation The processor reads the status registers to determine if the operation completed without errors M68HC11 embedded microprocessor 8-bit microprocessor Read-Only Memory (ROM) Holds code (program) Program once, not easily writable thereafter Contents are maintained when system is powered off Electrically Erasable Programmable ROM (EEPROM) Can be written, but slowly Holds configuration information, etc. Contents are maintained when system is powered off SRAM Used to hold variables, etc. M68HC11 embedded microprocessor Serial and parallel I/O interfaces Analog to digital (A/D) converter Converts analog input signals (voltage level) to a binary representation that can be processed within the CPU Timer Can be used to periodically interrupt the CPU to perform some function, e.g., read incoming data on a parallel port M68HC11 block diagram M68HC11 parallel I/O interfaces Five ports (PORT A-PORT E) 8 bits wide except for D (6 bits) PORT B is output only PORT E is input only Can be used as input for an A/D converter PORT C and PORT D are bidirectional Individual pins can be configured as inputs or outputs Configuring parallel I/O ports Parallel I/O ports C and D can be configured Whether each pin is used as an input or output Type of handshaking used to interface with peripherals Whether interrupts are generated on external events Parallel I/O registers lie between the CPU and the I/O ports To read or write port data and for configuration Parallel I/O registers address register name bit 7 6 5 4 3 2 1 0 $1000 PORTA bit 7 6 5 4 3 2 1 0 $1002 PIOC STAF STAI CWOM HNDS OIN PLS EGA INVB $1003 PORTC bit 7 6 5 4 3 2 1 0 $1004 PORTB bit 7 6 5 4 3 2 1 0 $1005 PORTCL bit 7 6 5 4 3 2 1 0 $1007 DDRC bit 7 6 5 4 3 2 1 0 $1008 PORTD 0 0 5 4 3 2 1 0 $1009 DDRD 0 0 5 4 3 2 1 0 $100A PORTE bit 7 6 5 4 3 2 1 0 $1026 PACTL DDRA7 PAEN PAMOD PEDGE 0 0 RTR1 RTR0 $1028 SPCR SPIE CPHA SPR1 SPR0 SPE DWOM MSTR CPOL Addresses for PORT A through PORT E can be referenced for reading or writing port data Data direction registers Ports C and D each have an 8-bit data direction register (DDRC and DDRD) The direction (input or output) of each pin is configured by writing a value to the DDR bit 0 configures as input, 1 as output Handshaking modes Handshaking refers to the manner in which two Three handshake modes available for Port C interfacing units coordinate data transfer Simple strobe mode Full-input handshake Full-output handshake Two signals (STRA and STRB) used for status or latching of data PIOC register is used to configure handshaking Written by software to set up the desired mode, polarity of signals, etc. Simple strobe handshaking – output Enabled when HNDS=0 in the PIOC register STRB is pulsed in conjunction with a write to the PORT B register PORT B new PORT B data STRB INVB control bit in PIOC specifies the STRB polarity Timing signals transition in relation to the HC11 clock Simple strobe handshaking – input Transition on STRA is used to latch incoming data into the PORT C register PORT C new PORT C data STRA STAF Polarity determined by EGA bit in PIOC STAF bit in PIOC gets set after STRA latches data, and reset when data is read out by the CPU STAF 01 creates an interrupt if STAI=1 in PIOC STRA is asynchronous in relation to HC11 clock STAF transition occurs in relation to HC11 clock Full-input handshaking Enabled when HNDS=1 and OIN=0 in PIOC PORT C used as an input Transition on STRA used to latch incoming data STRB used as a “ready” signal that indicates that the HC11 can accept new data on PORT C Latching data into PORT C negates STRB Reading data out of PORT C asserts STRB PORT C STRA STAF STRB Read of PORT C new PORT C data Full-output handshaking Enabled when HNDS=1 and OIN=1 in PIOC PORT C used as an output STRB is asserted when data is written to PORT C STRA is driven by the external peripheral to indicate that it has received the data STRB gets deasserted STAF is set indicating that new data can be written to PORT C Write of PORT C PORT C STRB STRA STAF new PORT C data MC68HC11 Timer The timer can be used to measure the time of events and to generate periodic interrupts The timer consists of A A 16-bit free-running counter Sets an overflow bit when it wraps around to 0 prescalar that sets the number of clock cycles between which the counter is incremented 1, 4, 8, or 16 Comparators for measuring elapsed time A real-time interrupt function The timer can generate periodic interrupts Useful for forcing the CPU to perform some function on a regular basis to meet some deadline, e.g., monitoring temperature and controlling coolant flow Interrupt handler calls the functions to be periodically performed A/D converter Each PORT E input serves as an input channel for the A/D converter All 8 inputs can be connected and sampled at different times A/D converter Converter creates a binary representation in one of the four A/D result registers (ADR1-ADR4) that is proportional to the voltage on the input channel ADR1, ADR2, ADR3, ADR4 are at addresses $1031, $1032, $1033, and $1034, respectively Other registers allow you to configure the converter Questions?