Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Resilient control systems wikipedia , lookup
Control system wikipedia , lookup
History of electric power transmission wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Switched-mode power supply wikipedia , lookup
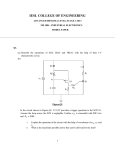
Power engineering wikipedia , lookup
Mains electricity wikipedia , lookup
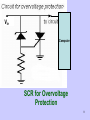
Power inverter wikipedia , lookup
Electrification wikipedia , lookup
Commutator (electric) wikipedia , lookup
Voltage optimisation wikipedia , lookup
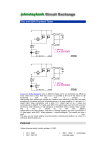
Rectiverter wikipedia , lookup
Three-phase electric power wikipedia , lookup
Alternating current wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Electric motor wikipedia , lookup
Electric machine wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Variable-frequency drive wikipedia , lookup
• Introduction Final Control • Thyristors –SCR –TRIAC –DIAC • Stepping Motors • Summary 1 A thyristor is a four-layer semiconductor device, consisting of alternating P type and N type materials (PNPN). A thyristor usually has three electrodes: an anode, a cathode, and a gate (control electrode). The most common type of thyristor is the silicon-controlled rectifier (SCR). Thyristors are used in motor speed controls, light dimmers, pressure-control systems, and liquid-level regulators. •Thyristor SCR-Silicon Controlled Rectifier Triac Diac etc SCR Symbol Hockey Puck SCR http://www.larkinpower.com/Thyristors.htm 2 A commercially practical solid state rectifier has been operated by engineers at General Electric's Clyde, New York Rectifier Engineering Laboratory. This silicon-controlled rectifier operates in the same manner as a thyratron, and is capable of switching 1000 watts. A power rating of this magnitude is sufficient for most military and commercial applications. The device is expected to be first used in missiles. The size of the silicon controlled rectifier is approximately twice that of a signal type transistor and 1/100 the size of a thyratron. The predicted life of the device is over 300,000 hours as compared to the 1000 hour life of a thyratron. (Electronic Design, Jan. 8, 1958, p. 7) The first SCRs were compared to thyratrons because that's what vacuum-tube era engineers understood. For today's engineer, we'd probably have to reverse Technical Papers the analogy--a thyratron, a gas-filled grid-controlled rectifier, was like an SCR.--Steve Scrupski Thyratron Power Supply at Fermilab SCR Origins 3 Operation of an SCR http://www.tpub.com/neets/book7/26c.htm 4 Igate (turn-on) 0.8-25 mA Gate Controlled (Main) turn-on time Imax .8-7 Amps <2 usec http://www.nteinc.com/Web_pgs/SCR.html SCR Characteristics 5 VAK= 1-1.5 volts I Very High V Very High Reverse voltage to break it down http://www.tpub.com/neets/book7/26d.htm SCR V-I curve 6 Characteristics of 2N1595 Peak Reverse Blocking Voltage = 50 volts RMS Forward Current (max) = 1.6 amps Typical Gate Trigger Current= 2 mA Typical Gate Trigger Voltage= .7 volts Turn-on time = .8 usec Turn-off time=10 usec SCR Circuit 7 SCR Output 8 Vin Computer SCR for Overvoltage Protection 9 Characteristics of 2N1595 Phase Control with an SCR http://www.fairchildsemi.com/pf/1N/1N4148.html 10 SCR Phase Control 11 Diac Triac Diacs and Triacs • The Diac and Triac are bilateral thyristors, meaning that they conduct current in both directions • The Diac is designed to conduct when breakdown occurs in both directions The triac is like two parallel SCR’s, with one in each direction. • Triac’s have less current carrying ability than SCR’s 12 Τau = RC = .12 msec A Triac Full-Wave Circuit 13 Τau = RC = 3.8 msec 14 A Triac Full-Wave Circuit Power Control with Thyristors and Triacs Diac-Triac Phase Control 15 http://www.geocities.com/tjacodesign/dimmer/dimmer.html Diac-Triac Light Dimmer 16 A stepper motor system is an electro-mechanical rotary actuator that converts electrical pulses into unique shaft rotations. This rotation is directly related to the number of pulses. The speed is synchronous to the rate of pulsing. Stepper motors feature bi-directional control, built-in braking, variable torque, power control, precision accuracy, high resolution, open-loop control, and direct interface to digital systems. Stepper Motors - General Description A step motor converts electrical energy into discrete motions or steps. The motor consists of multiple electrical windings wrapped in pairs (phases) around the outer stationary portion of the motor (stator). The inner portion (rotor) consists of iron or magnetic disks mounted on a shaft and suspended on bearings. The rotor has projecting teeth which align with the magnetic fields of the windings. When the coils are energized in sequence by direct current, the teeth follow the sequence and rotate a discrete distance necessary to re-align with the magnetic field. The number of coil combinations (phases) and the number of teeth determine the number of steps (resolution) of the motor. For example, a 200 step per rev (spr) motor has 50 rotor teeth times 4 coil combinations to equal 200 spr. There are no brushes between the rotor and stator assembly; a stepper motor is a multipole (polyphase) brushless DC motor. These multiple coil pairs can be connected either positive or negative resulting in four unique full steps. When the coils are sequenced correctly, the motor rotates for- ward. When the sequence is reversed, the motor rotates in reverse. http://www.cs.uiowa.edu/~jones/step/#introduction http://www.doc.ic.ac.uk/~ih/doc/stepper/ 17 Stepper Motors In the KP4M4-001 stepper motor, the permanent magnet lies North - South along the shaft. It is encased in two "stacks" each with 25 teeth round the rim. The teeth on the South stack are out of phase with the teeth on the North stack by half the gap between teeth as can be seen in the photo of the shaft shown above. http://www.doc.ic.ac.uk/~ih/doc/stepper/kp4m4/ A Stepper Motor 18 Permanent Magnet or can also be switched Simple Stepper Operation http://www.st.com/stonline/books/ascii/docs/1679.htm 19 Summary • Introduction • Thyristors – SCR – TRIAC – DIAC • Stepping Motors • Summary 20