Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
1
Early Pest Detection in Greenhouses
Vincent Martin, Sabine Moisan
INRIA Sophia Antipolis Méditerranée, Pulsar project-team, France
2
Motivation: reduce pesticide use
• Agricultural issues:
•
•
•
•
Temperature and hygrometric conditions inside a greenhouse favor
frequent and rapid attacks of bioagressors (insects, spider mites,
fungi).
Difficult to know starting time and location of such attacks.
Reduce time overhead of workers in charge of greenhouse
biological monitoring
Understand better pest population behaviors
• Computer vision issues:
•
•
2/12
Automatically identify and count populations to allow rapid decisions
Improve and cumulate knowledge of greenhouse attack history
3
DIViNe1: A Decision Support System
1Detection
of Insects by a Video Network
Identification and counting of pests
3/12
Manual method
DIViNe system
Result delivery
Up to 2 days
Near real-time
Advantages
Discrimination capacity
Autonomous system,
temporal sampling, cost
Disadvantages
Need of a specialized operator
(taxonomist); precision vs. time
Predefined insect types;
video camera installation
4
Proposed Approach
Automatic vision system for in situ,
non invasive, and early detection
• Based on a video sensor
network
• Lined up with cognitive vision
research (machine learning,
a priori knowledge…)
Intelligent
Acquisition
Image sequences with
moving objects
Detection
Regions of interest
Classification
Pest identification
Current work
4/12
Future work
Pest counting results
Tracking
Pest trajectories
Behaviour
Recognition
Scenarios (laying,
predation…)
5
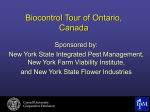
First DIViNe Prototype
400€
• Network of 5 wireless video
cameras (protected against water
projection and direct sun).
• In a 130 m2 greenhouse at
CREAT planted with 3 varieties of
roses.
• Observing sticky traps
continuously during daylight.
• High image resolution
(1600x1200 pixels) at up to 10
frames per second.
5/12
6
Intelligent Acquisition Module
• Scheduled image
sequence acquisition:
•
•
at specific time
intervals,
on motion detection
• Distant tuning of each
sensor settings
(resolution, frame rate)
• Storage and retrieval
of relevant video data
6/12
7
Detection Module
• Handle illumination changes
•
due to sun rotation, shadows, reflection…
• Adapt algorithms to deal with different image contexts
video clip
Cloudy context with reflections
and low contrast
7/12
Sunny context with shadows and
high contrast
8
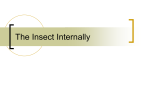
Detection Module: Preliminary Results
• Weakly supervised learning to acquire context knowledge from global
image characteristics
• Context identification for background model selection
video clip
Acquisition: sticky trap
8/12
Detection without context
adaptation
with context adaptation
9
Classification Module: Preliminary Results
Regions labeled according to insect types based on
a visual concept ontology:
Domain Class WhiteFly SuperClass Bioagressor {
ShapeConcept Descriptors:
circularity
[0.20 0.50 0.60 ]
excentricity [ 0.10 0.20 0.40 0.50 ]
rectangularity [ 0.50 0.6 0.8 0.85 ]
elongation
[ 0.30 0.35 0.70 0.80 ]
convexity
[ 0.70 0.75 1.0 1.1 ]
compacity
[ 0.10 0.25 0.9 1.0 ]
ColorConcept Descriptors:
saturation
[ 0.0 0.0 0.2 0.3 ]
lightness
[ 120 130 240 260 ]
hue
[ 80 90 170 180 ]
SizeConcept Descriptors:
area
[ 0.5 0.6 1.2 1.3 ]
length
[ 0.6 0.8 2.5 3.5 ]
width
[ 0.2 0.3 1.0 1.3 ]
}
9/12
10
Conclusion and Future Work
• A greenhouse equipped with a video camera network
• A software prototype:
•
•
Intelligent image acquisition
Pest detection (few species)
• Future:
•
•
•
•
Detect more species
Observe directly on plant organs (e.g. spider mites)
Behaviour recognition
Integrated biological sensor
See http://www-sop.inria.fr/pulsar/projects/bioserre/
10/12
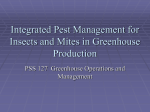
Behavior Recognition Module
11
Laying scenario example
Behavior description based on a generic
declarative language relying on a video event
ontology
state: insideZone( Insect, Zone )
event: exitZone( Insect, Zone )
state: rotating( Insect )
scenario: WhiteflyPivoting( Insect whitefly, Zone z ) {
A: insideZone( whitefly, z ) // B: rotating( whitefly );
Scenario models based on the concepts of states and
events related to interesting objects.
constraints: duration( A ) > duration( B );
}
• state = spatiotemporal property valid at a given
instant and stable on a time interval.
• event = meaningful change of state.
scenario: EggAppearing( Insect whitefly, Insect egg, Zone z ) {
insideZone( whitefly, z ) then insideZone( egg, z );
}
main scenario: Laying( Insect whitefly, Insect egg, Zone z ) {
• scenario = combination of primitive states and
events by using logical, spatial or temporal
constraints between objects, events, and states.
WhiteflyPivoting( whitefly, z ) //
loop EggAppearing( egg, z ) until
exitZone( whitefly, z );
then send(”Whitefly is laying in ” + z.name);
}
11/12
12
Plant Organs Monitoring
• Issues:
•
•
•
12/12
Plant motion estimation ( + need of auto focus sensors)
Non planar field of view
choice of the sensor positions