Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Discussion of Scaling
10:45 - 2:00
10:45
Introduction
J. Rundle
10:50
Scaling & Computation in Other Problems
W. Klein
11:10
Scalable Fault Systems
J. Rundle
11:50
Virtual California Model
P. Rundle
12:00
Lunch
1:00
Discussion
J. Rundle
1:15
Standard Physical Earth Model
S. Ward
Hierarchy of Physical & Computational Spatial Scales
A “system of
systems” that
scales with
size in a
predictable
way, or
“scalable
fault system”
Scalable Earthquake Fault Systems
Points for Discussion
John Rundle
University of Colorado, Boulder CO
Presented at GEM-ACES Meeting, Maui HI, July 29-Augest 3, 2001
& SCEC2 Retreat, Lake Tahoe CA, July 20-22, 2001
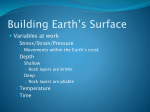
Data-Model-Simulations Flow Diagram
Earthquake Data:
Fault Topology
Plate Kinematics
Stress Data
Paleoseismology
Current Seismicity
Historic Events
Locations
Times
Moment Tensors
EQ Models:
Physics of Friction &
Local Instabilities
Interactions & Stress
Greens Functions
Statistical & Stochastic
Physics
Nonlinear Dynamics
EQ Simulations:
Enabled by IT
Algorithms
Scalable Computing
Grid Computing
Web-based ObjectBroker Systems
Data Base Management
Data Mining
Visualization
New
Physics
New Data
Falsifiable
Tests
Predictions
A Strawman Definition of an
Earthquake Fault System
An earthquake fault system is a grouping of topologically
complex faults or fault segments that have significant mutual
interactions due to elastic or other stress transfer. The
activity on the faults is strongly correlated and displays
emergent space-time patterns that are properties of the
system as a whole and not of the individual faults of which
the system is composed.
Scalable fault systems have physical properties and
characteristic space-time patterns that depend on changes in
spatial and temporal scales of resolution in predictable ways.
Scalable Physics and Computations
1. Earthquakes are a high dimensional complex system having many scales in space and
time. Are all scales important? Or can we negelect some scales?
2. Do we need to use new approaches to the problem based on computational physics &
information technology?
- Earthquakes faults appear to be strongly correlated systems
- Numerical simulations will allow us to understand & integrate the physics of
earthquakes across all scales
3. Do scalable physics require scalable approaches to computations, data mining &
visualization?
- Correlation-Operator analysis
- Hidden Markov Methods
- Wavelets
4. Do we need to think about scalable computing?
-
Beowulf clusters (e.g., MPI, PVM)
Grid computing (e.g., www.gridcomputing.org, seti@home)
P2P architectures
Algorithms (e.g., Fast Multipoles)
High Performance Scalable Web-Based Computing
P2P Modification of Client-Server Infrastructure Defines Framework for
Multiscale Problem Solving Environment
Publish / Subscribe:
An asynchronous
model of
computation
adaptable to webbased computing.
MyXoS
Data
base
Server
MyXoS
Server
MyXoS
MyXoS
MyXoS
Server
Server
Server
Pu blish
……. Sub scribe …..
Peer to Peer P2P “Illusion” among
collaborating clients
MyXoS assumes an
XML-type schema
to describe objects,
and the existence
of an Object
Request Broker
middleware like
CORBA
Serial & Parallel Codes Using MPI
Parallel Code Using MPI
Serial Code
Dimension Statements
Enter some data
Do some computations
Call a subroutine
Print the answer
End Code
Dimension Statements
CALL MPI_INIT(ierrpr)
CALL MPI_COMM_RANK(MPI_COMM_WORLD, myid, ierrpr)
CALL MPI_COMM_SIZE(MPI_COMM_WORLD, nprocs, ierrpr)
if (myid .eq. 0) then
Enter some data
end if
call MPI_BCAST(variable_A,dimensions,
MPI_DOUBLE_PRECISION, 0,MPI_COMM_WORLD,ierrpr)
if (myid .eq. 0) then
do statement over i
call MPI_RECV(variable_B,dimensions,
&
MPI_DOUBLE_PRECISION,
&
MPI_ANY_SOURCE, MPI_ANY_TAG,
&
MPI_COMM_WORLD,status, ierrpr)
end do
else if (myid .ne. 0) then
MPI Send-Receive Block
Do some computations
Call a subroutine
do statement over i
call MPI_SEND(variable_B,dimensions,
&
MPI_DOUBLE_PRECISION,0,
&
i, MPI_COMM_WORLD,ierrpr)
end do
end if
if (myid .eq. 0) then
Print the answer
end if
call MPI_FINALIZE(ierrpr)
End Code
Historic Earthquakes on a Fault System
Earthquakes on major faults occur quasi-periodically
A.D. 1857
1480
1812
1346
1680
1100
From K. Sieh et al., JGR, 94, 603 (1989)
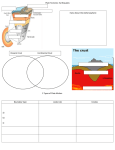
A Model for the Statistical Dynamics of an Earthquake Fault:
The Burridge-Knopoff Slider Block Model
R. Burridge and L. Knopoff, Bull. Seism. Soc. Am, 57, 341 (1967)
The nearest-neighbor BK model was the
first slider block model.
Sticking points on the fault are represented
by blocks having uniform loader spring
constant KL(= kp in figure at right).
Each block is connected to its 2d nearest
neighbors (d = spatial dimension) by springs
having constant KC ( = kc at right).
A friction law prevents the blocks from
sliding until sufficient force (stress) builds
up.
A simulated earthquake begins when the force
on a block due to the plate motion reaches a
stress threshold F.
The avalanche of failing blocks, triggered by
stress transfer from sliding blocks, represents
an earthquake.
Theoretical Friction Curves Can Be Obtained by
Coarse- Graining Microscopic Dynamics in Space and Time
Macroscopic friction curves can be
obtained by a space-time coarse-graining of
the mean field slider block dynamics.
Frictional sliding is a competition between
the rate at which stress is supplied across the
contact layer, K VLoad , and the rate at which
stress is dissipated, f ( ) :
d ()/ dt = K VLoad - f (,V)
Rate of Change of Stress
W. Klein et al., Phys. Rev Lett., 65, 1462, (1998)
K VLoad
f( ,V )
where: V = dS / dt , = - R .
f ( ) has a Van der Waals loop, with two
spinodal points (extrema...red arrows).
Stress,
KL = 1.0, KC = 100.0, = 0.1, v = 0.48
We Have An Apparent Paradox
Here we see a non-equilibrium system that is demonstrating
equilibrium properties...The appearance of spinodal loops, the
spinodal scaling exponents, the form of the correlation function, and
other properties.
How does this physics arise?
K VLoad
f( )
Thermal Phase Transitions
(Equilibrium)
Frictional Sliding
(Non-equilibrium)
Recurrent Events:
The Leaky Threshold Equations
Recall:
d / dt = K VLoad - f ( )
Expand f ( ) Leaky Threshold Equation
(“Hopfield Equation”):
F
R
d / dt = KVLoad - { + i (t - tF,i)}
F
R
Elasticity Equation:
= K (VLoad t - S)
=0
Time
100550
0.70
0.69
100500
0.68
0.67
100450
0.66
0.65
100400
0.64
DISPLACEMENT, MICRONS
Three stick slip cycles
COEFFICIENT OF FRICTION
Notes:
1. The - function parameterizes the sudden slip.
2. - R
3. ( t F) = F
4. { f / }T
5. S = slip
>0
0.63
850000
850100
850200
850300
TIME, SEC
Data from T Tullis, PNAS, 1996
(also see Karner & Marone, 2000)
Stress,
Aside: Rate-State Friction can be Derived
Consider the dynamical mean field equation:
d ()/ dt = K V - f ( )
Figure:
We expand around point C, having stress C and load
velocity V = VM .
F
B
d
f ()
dt
Define:
C
D
A
LM = { C - R } / K = VM / ( C )
Physically, LM is the shear displacement
across the contact zone when = C - R
Stress,
Low stress stable branch AB
Intermediate stress unstable
branch BCD
High stress stable branch DEF
VM is Maxwell equal-area line
We find from Rate-State experimental data:
K .0025 MPa / m
(Contact Layer Stiffness)
VM 1.26 mm/s
(Maxwell Velocity)
L1 10 m
(Shear displacement)
E
K VM
Stress,
K
Experiment
Model of Contact Layer
Dynamics of Earthquakes: Simulations
See for example J.B.R. et al., Phys. Rev. E, 61, 2418 (2000); P.B. Rundle, J.B.R. et
al., Phys. Rev. Lett., submitted (2001)
Historic record of events over
the last 200 years is
assimilated into frictional
properties of the fault network
S - K
Historic Earthquakes: Last 200 Years
Fault Network Model for
Southern California
= CSF Stress: Time vs. Space
Time (Years)
Simulations of earthquake
fault systems can be carried
out using the Virtual
California (GEM) model. At
left is shown the buildup of
CFF stress over time and
space. Lines = Earthquakes
Space (Fault Segments)
San Andreas Fault
At right is shown and
example of one of the large
earthquakes that occur during
a simulation.
With and Without Leaky Threshold:
Dynamical modes are emergent properties of the system as a whole,
rather than of the individual faults.
Time
Leaky Threshold,
Space
i 0
No Leaky Threshold, all
All fault segments concatenated along horizontal axis
i = 0
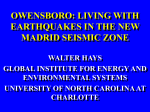
Surface Deformation from Earthquakes
There is a wealth of data characterizing the surface deformation observed
following earthquakes. As an example, we show data from the October 16,
1999 Hector Mine event in the Mojave Desert of California (left), along with
the simulations from the Virtual California simulation (right).
At left is a map of the
surface rupture. Below is
the surface displacement
observed via GPS (left)
and via Synthetic
Aperature Radar
Interferometry, “InSAR”
(right).
GPS (JPL)
InSAR (JPL)
At right is a map of the
simulated event shown
earlier. Below are the
associated GPS-type (left)
and the InSAR-type (right)
surface displacements.
Example of Preliminary Results
Virtual_California 2000
3D View
Color-Coded
Fault Friction
N. San Andreas S. San Andreas
Questions:
Scalable Earthquake Fault Systems
What are the primary, observable, emergent dynamical modes or patterns for
a given real fault system? Are these the same as revealed by simulations,
how do they change with scale, and what information do these modes reveal
about the underlying physics & dynamics?
What is the minimal physics that needs to be included at each scale of
modeling & simulation for a particular problem? How does it depend on the
nature of the data, and the computational resources available?
How do physical processes at each scale of space and time couple to
processes at other scales in the hierarchy?
What are the best (i.e., most realistic) IT approaches to use for computations,
data mining and visualization at each scale?
How does real or simulation data taken at one scale of space and time relate
to data taken at other scales?
Friction Model for VC 2000
Scalable Earthquake Fault Systems
Gutenberg-Richter Frequency- Magnitude Relation
The GR relation (1942) is the most
famous of the earthquake scaling
relations. Using the definitions:
m Magnitude
M Seismic moment ~ Slip x Area
one can find that the frequency F of
earthquakes greater than moment Mo
scales as:
F ~ Mo-2b/3
In terms of earthquake area A, the
corresponding probability density
function for frequency f is:
f ~ A -2
The GR relation is most commonly
stated as:
Log10 { F } = a - b mo
where mo is the magnitude
corresponding to the moment Mo
The Omori law for aftershock
occurrence has been known since the
1896 Nobi, Japan, earthquake. It is a
scaling relation between the rate r
(number / time) of earthquakes as a
function of time t = t – tms since the
mainshock:
r =
C
Log10 { Number}
Omori Scaling Law for Aftershock Decay
[ D + t ] p
where C and D are empirically
determined constants, and p is a
scaling exponent (Omori exponent).
Observations indicate that typically:
p1
It is now thought that an Omori law
may hold for foreshocks with the
same value of p.
Log10 { Time since Mainshock }
The data above are from the 1992 Landers,
California earthquake, that occurred in the
Mojave desert of California.
The Bufe-Varnes (1993) scaling law for
precursory activation is a relation
between the Cumulative Benioff Strain
(t) in the source region of the
impending earthquake and the time
interval t = tms – t prior to the main
shock:
(t) = o - 1 t
Cumulative Benioff Strain
Bufe-Varnes Scaling Law for Precursory Activation
Time: Date
m
where o , 1 are empirical constants,
and m is a scaling exponent whose
value is currently estimated to be:
m .26 0.15
Cumulative Benioff Strain (t) is defined in terms
of the seismic moment of events leading up to the
main shock:
(t)
N(t)
{ Mi }1/2
i=1
where Mi is the seismic moment of the ith
earthquake, and N(t) is the number of events prior
to the mainshock at time t.
Like mean field Ising models, mean field slider
block models demonstrate scaling near a critical
velocity V = VSP.
At upper right, 18 million clusters in a 512 x
512 system produce a number-size relation:
n(s) ~ exp { - |V – VSP| s} / s-1
Log10 n(s)
Scaling in Mean Field Slider Block Models
(1)
Log10 s
where:
Fundamental
clusters,
slope = -1.5
= 1
Careful analysis indicates that the scaling
region is actually is a superposition of 3
separate scaling regimes (Anghel et al., Phys.
Rev. E, in press, 2001), each of which obeys an
equation like (1).
Log10 n(s)
= 2.5
Coalescing
clusters, slope
= -1.5
Log10 s
Arrested
Nucleation
clusters,
slope = - 2.0
Space-Time Process Scales