Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
FINITE ELEMENT MODELLING OF PIEZOELECTRIC ACTIVE STRUCTURES: SOME APPLICATIONS IN VIBROACOUSTICS
V. Piefort
Active Structures Laboratory, Université Libre de Bruxelles, Belgium
ABSTRACT
The use of piezoelectric materials as actuators and
sensors for noise and vibration control and noise reduction has been demonstrated extensively over the
past few years (10).
The frequency response functions between the inputs
and the outputs of a control system involving embedded distributed piezoelectric actuators and sensors in
a shell structure are not easy to determine numerically. The situation where they are nearly collocated
is particularly critical, because the zeros of the frequency response functions are dominated by local
effects which can only be accounted for by finite element analysis (7).
The fundamental equations governing the equivalent
piezoelectric loads and sensor output are derived for
a plate starting from the linear piezoelectric constitutive equations. The reciprocity between piezoactuation and piezosensing is pointed out. A finite element formulation for an electromechanically coupled
piezoelectric problem has been proposed (8). The
frequency response functions between actuators and
sensors are obtained using a state space model of the
control system extracted from the dynamic finite element analysis. The importance of the in-plane component is ilustrated by a cantilever plate with four
nearly collocated piezoceramic patches
One situation where this work is particularly applicable is in the use of structure-borne sensors to measure
sound power radiation. These are preferable to microphones in vibroacoustic control because they do
not introduce time delays in the control loop. It can
be shown that, at low frequency, there is a strong
correlation between the sound power radiated by a
baffled plate and its volume velocity.
Electrode shaping to achieve modal filtering or inherent integration (Quadratically Weighted Strain Integration Sensor) has been proposed (6, 12). This
technique was implemented for active noise control:
the ASAC (Active Structural AcousticControl) panel
exhibits a colocated quadratically shaped piezoelectric actuator/sensor pair (3). This paper stresses the
influence of the in-plane components on the zeros of
the open-loop frequency response functions of such
colocated control systems. An alternative design is
investigated.
A noise radiation sensor consisting of an array of
independent piezoelectric patches connected to an
adaptive linear combiner has been proposed (11);
the piezoelectric patches are located at the nodes of
a rectangular mesh. This strategy can be used for
reconstructing the volume displacement of a baffled
plate with arbitrary boundary conditions.
1
PIEZOLAMINATED PLATE
The constitutive equations of a linear piezoelectric
material read (5).
{T } = [cE ]{S} − [e]T {E}
{D} = [e]{S} + [εS ]{E}
(1)
(2)
T
where {T } = {T11 T22 T33 T23 T13 T12 } is the stress
T
vector, {S}={S11 S22 S33 2S23 2S13 2S12 } the deformation vector, {E} = {E1 E2 E3 } the electric
field, {D} = {D1 D2 D3 } the electric displacement,
[c]the elasticity constants matrix, [ε] the dielectric
constants, [e] the piezoelectric constants. (superscripts E , S and T indicate values at E, S and T
constant respectively)
1.1
Single Layer in Plane Stress
We consider a shell structure with embedded piezoelectric patches covered with electrodes. The piezoelectric patches are parallel to the mid-plane and
orthotropic in their plane. The electric field and
electric displacement are assumed uniform across the
thickness and aligned on the normal to the mid-plane
(direction 3).
With the plane stress hypothesis, the constitutive
equations can be reduced to
T11
E S11 e31
T22
S22
= c
− e32 E
T12
2S12
0
D
= {e31 e31 0} {S} + εS E
(3)
(4)
where cE is the stiffness matrix of the piezoelectric
material in its othotropy axes. In writing Equ.(3),
it has been assumed that the piezoelectric principal axes are parallel to the structural othotropy axes
and that there is no piezoelectric contribution to the
shear strain (e36=0). This is the case for most commonly used piezoelectric materials in laminar designs
(e.g. PZT, PVDF). The analytical form of cE can
be found in any textbook on composite materials.
1.2
Laminate
A laminate is formed from several layers bonded together to act as a single layer material (Fig.1); the
bond between two layers is assumed to be perfect, so
that the displacements remain continuous across the
bond.
The global constitutive equations of the laminate,
which relate the resultant in-plane forces {N } and
bending moments {M }, to the mid-plane strain {S0 }
and curvature {κ} and the potential applied to the
various electrodes can now be derived by integrating
Equ.(6) over the thickness of the laminate
N
A B
S0
=
+
M
B D
κ
e31 φ
Xn Z zk
I3
k
−1
e32
dz (9)
[RT ]k
z
I
k=1 z
h
3
k
k−1
0 k
or
N
A B
S0
=
+
M
B D
κ
e31
Xn I3 −1
e32
[RT ]k
φ
zmk I3
k=1
k
0 k
(10)
where
zmk =
Figure 1: Multilayered material
According to the Kirchhoff hypothesis, a fiber normal
to the mid-plane remains so after deformation. It
follows that:
{S} = {S0 } + z {κ}
{T } =
Dk
e31
−1
e32 Ek
Q k {S} − [RT ]k
0 k
= {e31 e32 0}k [RS ]k {S} + εk Ek
(6)
(7)
−1
where [RT ]k is the transformation matrix relating
the stresses in the local coordinate system (LT) to
the global one (xy). Similarly, [RS ]k is the transformation matrix relating the strains in the global
coordinate system (xy) to the local one (LT). The
stiffness matrix
of layer k in
the
global coordinate
system, Q k , is related to cE k by
−1 Q k = [RT ]k cE k [RS ]k
(8)
As mentioned before, the electric field Ek is assumed
uniform across the thickness hk = zk − zk−1 of layer
k. Thus, we have Ek = −φk /hk , where φk is the
difference of electric potential between the electrodes
covering the surface on each side of the piezoelectric
layer.
(11)
is the distance from the mid-plane of layer k to the
mid-plane of the laminate. The first term in the right
hand side of Equ.(10) is the classical stiffness matrix of a composite laminate, where the extensional
stiffness matrix [A], the bending stiffness matrix [D]
and the extension/bending coupling matrix [B] are
related to the individual layers according to the classical relationships:
(5)
where {S0 } is the mid-plane deformation and {κ},
the mid-plane curvature. The constitutive equations
for layer k in the global axes of coordinates read
zk−1 + zk
2
[A] =
X
Q
k
(zk − zk−1 )
k
[B] =
[D] =
1 X 2
Q k (zk2 − zk−1
)
2
k
1 X 3
Q k (zk3 − zk−1
)
3
(12)
k
The second term in the right hand side of Equ.(10)
expresses the piezoelectric loading.
Similarly, substituting Equ.(5) into Equ.(7), we get
φk
S0
Dk = {e31 e32 0}k [RS ]k [I3 z I3 ]
−εk
(13)
κ
hk
Since we have assumed that the electric displacement
Dk is constant over the thickness of the piezoelectric
layer, this equation can be averaged over the thickness, leading to
εk
S0
Dk = {e31 e32 0}k [RS ]k [I3 zmk I3 ]
− φk (14)
κ
hk
The classical Kirchhoff theory neglects the transverse
shear strains. Alternative theories which accomodate
the transverse shear strains have been developed and
have been found more accurate for thick shells (4).
In the Mindlin formulation, a fiber normal to the
mid-plane remains straight, but no longer orthogonal
to the mid-plane. Assuming that there is no piezoelectric contribution to the transverse shear strain
(e34 = e35 = 0), which is the case for most commonly used piezoelectric materials in laminar designs
(e.g. PZT, PVDF), the global constitutive equations
of the piezoelectric Mindlin shell can be derived in
a straightforward manner from equations (10) and
(14). The Kirchhoff formulation is kept here for clarity reasons.
1.3
Figure 2: Piezoelectric load
Actuation: piezoelectric loads
Equation (10) shows that a voltage φ applied between the electrodes of a piezoelectric patch produces
in-plane loads and moments:
e31
N
I3
−1
e32 φ
=−
[RT ]
(15)
M
zm I3
0
If the piezoelectric properties are isotropic in the
plane (e31 = e32 ), we have
1
1
−1
1 = e31 1
(16)
e31 [RT ]
0
0
It follows that
Nx
1
{N } = Ny
= −e31 φ 1
Nxy
0
Mx
1
{M } = My
= −e31 zm φ 1
Mxy
0
(17)
(18)
(19)
where zm is the distance from the mid-plane of the
piezoelectric patch to the mid-plane of the plate.
1.4
where D is given by Equ.(14). If the piezoelectric
properties are isotropic in the plane (e31 = e32 ), we
have
e31 {1 1 0} [RS ] = e31 {1 1 0}
(21)
and Equ.(20) becomes
We note that the in-plane forces and the bending
moments are both hydrostatic; they are independant
of the orientation of the facet. We therefore conclude that the piezoelectric loads result in a uniform
in-plane load Np and bending moment Mp acting
normally to the contour of the electrode as indicated
on Fig.2:
Np = −e31 φ, Mp = −e31 zm φ
Figure 3: Piezoelectric sensor
Sensing
Consider a piezoelectric patch connected to a charge
amplifier as on Fig.3. The charge amplifier imposes
a zero voltage between the electrodes and the output
voltage is proportional to the electric charge:
Z
1
Q
=−
D dΩ
(20)
φout = −
Cr
Cr Ω
φout
e31
= −
Cr
Z
Sx0 + Sy0 dΩ
Ω
Z
+zm
(κx + κy ) dΩ
(22)
Ω
The first integral represents the contribution of the
average membrane strains over the electrode and the
second, the contribution of the average bending moment. Using the Green integral
Z
Z
∇.a dΩ =
a.n dl
(23)
Ω
C
the foregoing result can be transformed into
Z
Z
e31
∂w
φout = −
u0 .n dl + zm
dl
Cr
C
C ∂n
(24)
where the integrals extend to the contour of the electrode. The first term is the mid-plane displacement
normal to the contour while the second is the slope
of the mid-plane in the plane normal to the contour (Fig.4). The comparison with Equ.(19) shows
a strong duality between actuation and sensing. It
is worth insisting that for both the actuator and the
sensor, it is not the shape of the piezoelectric patch
that matters, but rather the shape of the electrodes.
are the voltages φk across the piezoelectric layers; it
is assumed that the potential is constant over each
element (this implies that the finite element mesh
follows the shape of the electrodes). Introducing the
matrix of the shape functions [N ] (relating the displacement field to the nodal displacements {q}), and
the matrix [B] of their derivatives (relating the strain
field to the nodal displacements), into the Hamilton principle and integrating by part with respect to
time, we get
Figure 4: Contribution to the output of the piezoelectric isotropic sensor (e31 = e32 )
0=
1.5
Finite element formulation
1
{S}T {T } − {E}T {D}
2
(25)
Similarly, the virtual work density reads
T
δW = {δu} {F } − δφ σ
σ
φ
{D}
{E}
m[N ]T [N ]dΩ {q̈}
Z
A B
T
T
+ {δq}
[B]
[B]dΩ {q}
B D
Ω
Z
[B]T
Ω
. . . EkT
. . . EkT zmk
.
..
...
dΩ φk
...
..
.
..
..
.
.
Ek Ek zmk [B]dΩ {q}
+ {... δφk ...}
Ω
..
..
.
.
.
..
Z
.
0
..
dΩ φk
−ε
/h
+ {... δφk ...}
k
k
Ω
..
..
.
.
0
Z
T
− {δq}T
[N ] {PS }dΩ − {δq}T {Pc }
Z
Ω
(26)
where {F } is the external force and σ is the electric charge. From Equ.(25) and (26), the analogy
between electrical and mechanical variables can be
deduced (Table 1).
Mechanical
Force
{F }
Displ. {u}
Stress {T }
Strain {S}
Z
Ω
+ {δq}T
The dynamic equations of a piezoelectric continuum
can be derived from the Hamilton principle, in which
the Lagrangian and the virtual work are properly
adapted to include the electrical contributions as well
as the mechanical ones. The potential energy density of a piezoelectric material includes contributions
from the strain energy and from the electrostatic energy (13).
H=
{δq}T
Electrical
Charge
Voltage
Electric Displ.
Electric Field
Table 1: Electromechanical analogy
The variational principle governing the piezoelectric
materials follows from the substitution of H and δW
into the Hamilton principle (1). For the specific case
of the piezoelectric plate, we can write the potential
energy
Z T T N
1
H=
S0 κ
− E D dΩ
(27)
M
2 Ω
Upon substituting Equ.(10) and (14) into Equ.(27),
one gets the expression of the potential energy for a
piezoelectric plate. The electrical degrees of freedom
+ {. . . δφk . . .} {. . . σk . . .}
T
(28)
where we have introduced
{E}k = {e31 e32 0}k [RS ]k
(29)
and we have used the fact that
−1
T
[RT ]k {e31 e32 0}k = {E}Tk
(30)
[PS ] and [Pc ] are respectively the external distributed forces and concentrated
forces and
P
T
{. . . δφk . . .} {. . . σk . . .} = k δφk σk is the electrical work done by the external charges σk brought
to the electrodes.
Equation (28) must be verified for any {δq} and {δφ}
compatible with the boundary conditions; It follows
that, for any element, we have
[Mqq ]{q̈} + [Kqq ]{q} + [Kqφ ]{φ} = {f }
[Kφq ] {q} + [Kφφ ]{φ} = {g}
(31)
(32)
where the element mass, stiffness, piezoelectric cou-
pling and capacitance matrices are defined as
Z
[Mqq ] =
m[N ]T [N ]dΩ
(33)
Ω
Z
[Kqq ]
[B]T
A
B
B
D
[B]dΩ
Ω
Z
... EkT ...
[Kqφ ] =
[B]T
dΩ
... EkT zmk ...
Ω
..
.
0
−εk /hk
[Kφφ ] = Ω
..
.
0
[Kφq ]
=
T
= [Kqφ ]
(34)
(35)
(36)
(37)
and the external mechanical forces and electric
charge:
Z
T
{f } =
[N ] {PS }dΩ + {Pc }
Ω
Actuation is done by imposing a voltage {Φ} on the
actuators and sensing by imposing {Φ} = {0} and
measuring the electric charges {G} appearing on the
sensors.
Using a truncated modal decomposition (n decoupled modes) {Q} = [Z]{x(t)}, where [Z] represents
the n modal shapes and {x(t)} the n modal amplitudes, Equ.(40) and (41) become
{0} = [M][Z]{ẍ} + [C][Z]{ẋ}
(i)
+[KQQ ][Z]{x} + [KQΦ ]{Φ} (42)
(o)
{G} = [KΦQ ][Z]{x} + [KΦΦ ]{Φ}
(43)
Left-multiplying Equ.(42) by [Z]T , using the orthogonality properties of the mode shapes
T
[Z] [M] [Z] = diag(µk )
T
[Z] [K] [Z] = diag(µk ωk2 )
(44)
(45)
and a classical damping
T
{g} = − {. . . σk . . .}
[Z]T [C][Z] = diag(2ξk µk ωk )
The element coordinates {q} and {φ} are related to
the global coordinates {Q} and {Φ}. The assembly
takes into account the equipotentiality condition of
the electrodes; this reduces the number of electric
variables to the number of electrodes. Upon carrying out the assembly, we get the global system of
equations
[MQQ ]{Q̈} + [KQQ ]{Q} + [KQΦ ]{Φ} = {F }
[KΦQ ] {Q} + [KΦΦ ]{Φ} = {G}
(38)
(39)
where the global matrices can be derived in a
straightforward manner from the element matrices
(33) to (37). As for the element matrices, the global
T
coupling matrices satisfy [KΦQ ] = [KQΦ ] . The
element used for the actual implementation is the
Mindlin shell element from the commercial finite element package Samcef (Samtech s.a.).
1.6
State Space Model
Equ.(38) can be complemented with a damping term
[C]{U̇ } to obtain the full equation of dynamics and
the sensor equation:
{0} = [M]{Q̈} + [C]{Q̇}
+[KQQ ]{Q} + [KQΦ ]{Φ}
{G} = [KΦQ ] {Q} + [KΦΦ ]{Φ}
the dynamic equations of the system in the state
space representation finally read:
ẋ
0
I
x
=
ẍ
−Ω2 −2ξΩ " ẋ
{G} =
h
(o) T
KQΦ Z
where {Q} represents the mechanical dof, {Φ} the
electric potential dof, [M] the inertial matrix, [C]
the damping matrix, [KQQ ] the mechanical stiffness
matrix, [KQΦ ] = [KΦQ ]T the electromechanical coupling matrix and [KΦΦ ] the electric capacitance matrix.
#
0
{Φ} (47)
−
(i)
µ−1 Z T KQΦ
ix
+ [DHF ] {Φ} (48)
0
ẋ
where the modal shapes [Z], the modal frequencies
[Ω] = diag(ωk ), the modal masses [µ] = diag(µk ), the
(o)
modal electric charge on the sensor [KΦQ ][Z], and
(i)
the modal electric charge on the actuators [Z]T [KQΦ ]
, representing the participation factor of the actuators to each mode, are obtained from a dynamic finite
element analysis. [ξ] = diag(ξk ) are the modal classical damping ratios of the considered structure and
[DHF ] is the static contribution of the high frequency
mode; its elements are given by
Dlm = dlm −
(40)
(41)
(46)
Xn
k=1
(o)
(i)
(KΦQ Zk )l (ZkT KQΦ )m
µk ωk2
(49)
where dlm is the charge appearing on the lth sensor
when a unit voltage is applied on the mth actuator
and is obtained from a static finite element analysis.
Such a state space representation is easily implemented in a control oriented software allowing the
designer to extract the various frequency response
functions and use the available control design tools.
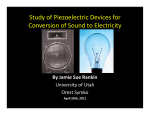
Figure 5: Cantilever plate with piezoceramics
2
2.1
APPLICATIONS:
Influence of the In-plane Component
Consider the cantilever plate represented on Fig.5;
the steel plate is 0.5 mm thick and four piezoceramic strips of 250 µm thickness are bounded symmetrically as indicated in the figure, 15 mm from
the clamp. The size of the piezos is respectively
55 mm ×25 mm for p1 and p3 , and 55 mm ×12.5 mm
for p2 and p4 . p1 is used as actuator while the sensor
is taken successively as p2 , p3 and p4 . The experimental frequency response functions between a voltage applied to p1 and the electric charge appearing
successively on p2 , p3 and p4 when they are connected to a charge amplifier are shown on Fig.6.
Figure 7: Simulation results
2.2
ASAC Panel
The ASAC (Active Structural Acoustical Control)
(3) plate is a volume velocity control device based
on the same principle as the QWSIS (Quadratically
Weighted Strain Integrated Sensor) sensor (12) for
both actuation and sensing. It consists in a clamped
1 mm thick plate of aluminium (420 mm×320 mm)
covered on both side with 0.5 mm thick piezoelectric
PVDF film (400 mm×300 mm). That configuration
exhibits a pair of colocated actuator/sensor. The
electrodes of both layers are milled in a quadratic
shape.
Figure 8: Experimental setup and FE mesh
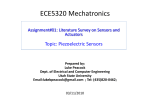
Figure 6: Experimental results
We note that the frequency response functions, particularly the location of the zeros, vary substancially
from one configuration to the other. This is because
the frequency response functions of nearly collocated
control systems are very much dependant on local effects, in particular the membrane strain in the thin
steel plate between the piezo patches. Figure 7 shows
the numerical results, based on the finite element
analysis, corresponding to the three sensor configurations; they agree reasonably well with the experiments.
For the actual laboratory model, the actuation and
sensing layers electrodes present 24 strips. The direction of smaller piezoelectric coupling coefficient
(d32 ) is perpendicular to the strips. The experimental setup and the finite element mesh used are shown
on Fig.8.
Since the performance of the control system is to
a large extend related to the distance between the
poles and the zeros of the open-loop frequency response function, these results were considered as disappointing, contrary to simplified analytical predictions which indicated far better performances (3).
At first, this lack of performance was attributed to
imperfect alignment of top and bottom layers (non
colocated actuator/sensor pair) or to an electrical
coupling due to the wiring.
In fact, the finite element based simulations have
shown that this lack of controllability is actually due
to local membrane effects (9), neglected in the first
analytical models together with the static contribution of the unmodelled high frequency modes (also
called residual mode)
In a first attempt to model the open-loop frequency
response function of the ASAC panel using finite elements, the agreement of results with the experiment
was rather unsatisfactory (Fig.9, FE #1). It appeared soon that the boundary conditions were not
those of a clamped plate: in the actual experiment,
the plate was almost free to move in its plane. The
in-plane movement of the plate results in an even
stronger influence of the membrane components and,
therefore, in a stronger in-plane mechanical coupling
between actuator and sensor. This induces an important feedthrough term in the frequency response
function: a substantial part of the strain induced by
the actuator induces directly membrane strain in the
sensor, without contributing to the transverse displacement which produces the volume velocity (useful control). The frequency response function of
(Fig.9, FE #2) was obtained by freeing the in-plane
movement of the plate in the finite element model; it
shows a very good agreement with the experimental
result.
the worst possible configuration. However, for the
actuator and the sensor taken separately, the direction of the strips has no influence on their characteristics. From this observation, the idea raised that
the feedthrough component could be substantially
reduced by using sensor and actuator strips perpendicular to each other.
Figure 10: FE mesh
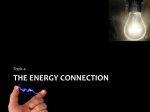
Figure 11: Open-loop frequency response functions
Figure 9: Open loop frequency response
2.3
Alternative Design
Note that, in the current design, the in-plane coupling is particularly strong because the direction of
higher piezoelectric effect (e31 e32 ) for the sensor and the actuator are parallel; the most important strain is induced in a direction parallel to the
direction of the strips and the sensor has the highest sensitivity to the strain in the direction of the
strips. The actuation and sensing strips being layed
in the same direction for the ASAC plate, it is in
By using sensor strips perpendicular to the actuator strips, the control device would then exhibit
a cross-ply actuator/sensor architecture and the inplane feedthrough term would be greatly reduced.
The FE-based tools allow to modelize such architectures quite easily and to extract the corresponding
frequency response functions to verify if this alternative is any better. The mesh used is represented
on Fig.10; the sensor electrode forms a right angle
with the actuator electrode. The comparison of the
frequency response functions between the voltage applied to the actuator layer and the charge measured
on the sensor layer for the parallel and cross-ply architectures for two piezoelectric anisotropy ratios are
represented on Fig.11.
Indeed, the distance between the poles and zeros of
the frequency response function is much larger for
the cross-ply configuration, as compared to the parallel configuration, and the distance increases when
the piezoelectric anisotropy ratio χ of the material
decreases. As a result, improved closed-loop performances may be expected from the cross-ply design.
This test case illustrates the situation of shell structures with embedded piezoelectric actuators and sensors where they are nearly collocated. It stresses the
importance of membrane components on the zeros
of the frequency response function. These local effects can easily be accounted for by the developped
modelling tools based on finite elements.
2.4
Array Sensor
Figure 13: Experimental setup and FE mesh
124 cm, 4 mm thick) covered with an array of 4 by
8 piezoelectric patches (PZT - 13.75 mm × 25 mm,
0.25 mm thick).
A scanner laser interferometer was used to measure
the velocity of an array of points over the window to
deduce the volume velocity. The excitation was provided by two shakers actuating the window directly.
Figure 12: Volume displacement sensor
A noise radiation sensor consisting of an array of
independent piezoelectric patches connected to an
adaptive linear combiner was proposed in (2, 11).
The coefficients of the linear combiner are adapted in
such a way that the mean-square error between the
reconstructed volume displacement (or velocity) and
either numerical or experimental data is minimized.
The electric charges Qi induced on the various
patches by the plate vibration are the independent
inputs of a multiple input adaptive linear combiner.
The coefficients αi of the linear combiner are adapted
in such a way that the mean-square error between
the reconstructed volume displacement (or velocity)
and either numerical or experimental data is minimized. It must be noted that the same array sensor
can also be used as modal filter by suitably adapting
the coefficients αi of the linear combiner.
This strategy can be used for reconstructing the volume displacement of a baffled plate with arbitrary
boundary conditions. If the piezoelectric patches are
connected to current amplifiers instead of charge amplifiers, the output signal becomes the volume velocity instead of the volume displacement.
The laboratory demonstration model (Fig.13) consists of a simply supported glass plate (54 cm ×
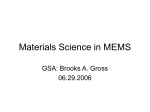
Figure 14: Freq. Response Functions/Shaker #1
The finite element mesh used for the numerical anal-
ysis is represented on Fig.13. The 30 first vibration
modes were taken into account for the dynamic analysis. Figure 14 shows the comparison between the
frequency response functions between the excitation
of Shaker #1 (in the center of the window) and, respectively, sensors 7, 14 and the volume velocity obtained by finite element analysis and experimentally.
6. Lee C.K. and Moon F.C., 1990. “Modal Sensors/Actuators”. Journal of Applied Mechanics,
57:434–441.
3
8. Piefort V., 2001. Finite Element Modelling of
Piezoelectric Active Structures. Ph.D. thesis, Université Libre de Bruxelles, Brussels, Belgium.
CONCLUSIONS
The theory of piezolaminated plates has been developed; the fundamental equations governing the
equivalent piezoelectric loads of a piezoelectric actuator and the output of a piezoelectric sensor have
been derived. A state space model has been obtained
and the importance of the in-plane components in
the open loop frequency response functions has been
stressed. Two applications of the developed tools in
vibroacoustic control have been described and shown
that good performances are achieved. The importance of the in-plane components in the open-loop
frequency response functions has been illustrated.
ACKNOWLEDGEMENTS
This study has been supported by a research grant
from the Région Wallonne, Direction Générale des
Technologies, de la Recherche et de l’Energie; The
support of the IUAP-4/24 on Intelligent Mechatronic
Systems is also aknowledged; The technical assistance of Samtech s.a. is deeply appreciated.
REFERENCES
1. Allik H. and Hughes T.J.R., 1970.
“Finite Element Method for Piezoelectric Vibration”.
International Journal for Numerical Methods in
Engineering, 2:151–157.
2. François A., De Man P. and Preumont A., 2001.
“Piezoelectric Array Sensing of Volume Displacement: A Hardware Demonstration”. Journal of
Sound and Vibration, 244:395–405.
3. Gardonio P., Lee Y., Elliott S. and Debost
S., 1999. “Active Control of Sound Transmission
Through a Panel with a Matched PVDF Sensor and
Actuator Pair”. Active 99, Fort Lauderdale, Florida,
USA.
4. Hughes T.J.R., 1987.
The Finite Element
Method. Prentice-Hall International Editions.
5. 1988.
“IEEE Standard on Piezoelectricity”.
ANSI/IEEE Std 176-1987.
7. Loix N., Piefort V. and Preumont A., 1998.
“Modeling aspects of active structures with collocated piezoelectric actuators and sensors”. Benelux
Quarterly Journal on Automatic Control (Journal
a), 39.
9. Piefort V. and Henrioulle K., 2000. “Modelling of
Smart Structures with Colocated Piezoelectric Actuator/Sensor Pairs: Influence of the in-Plane Components”. 5th International Conference on Computational Structures Technology, Leuven, Belgium.
10. Preumont A., 1997. Vibration Control of Active Structures - An Introduction. Kluwer Academic
Publishers, Dordrecht, The Netherlands.
11. Preumont A., François A. and Dubru S., 1999.
“Piezoelectric Array Sensing for Real-Time, BroadBand Sound Radiation Measurement”. Journal of
Vibration and Acoustics, 121.
12. Rex J. and Elliott S.J., 1992. “The QWSIS
- A New Sensor for Structural Radiation Control”.
MOVIC-1, Yokohama.
13. Tiersten H.F., 1967. “Hamilton’s Principle For
Linear Piezoelectric Media”. In Proceedings of the
IEEE, 1523–1524.