Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
BCTCS 2006
The Theory of Spatial Data Types
and Constructive Volume
Geometry
Constructive Volume Geometry
Is an algebraic framework for the high-level
Specification,
Representation,
Manipulation, and
Rendering
of spatial data types.
We use CVG to build complex scenes using
algebraic operations on fully 3D spatial
objects.
CT planet, Min Chen, 1999
M. Chen and J. V. Tucker, Constructive volume geometry,
Computer Graphics Forum, Vol.19, No.4, 281-293, 2000.
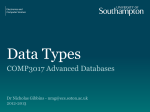
CVG Spatial Objects
A spatial object is a tuple
o = (O, A1, A2, …, Ak)
of scalar fields defined in R3, including an
opacity field O: R3 [0,1]
and possibly other attribute
fields:
A1, A2, …, Ak: R3 R, k ≥ 0.
Visibility of every point in R3 specified by
opacity attribute where 0 is transparent and
1 is opaque.
O: sphere
R: noise
G: constant
B: constant
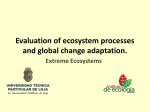
CVG Scene with Several Objects
scene
object
field
object
......
object
O R G B Ge Ka Kd Ks N Dn Rfl Rfr Txt ...
• Constant
• Built-in mathematical scalar field
• Volume Dataset
• Procedural scalar field
• Colour-separated image • plus various mappings
CVG Operations:
4 Colour Channel Model (I)
o1=(O1, R1, G1, B1)
o2=(O2, R2, G2, B2)
(o1, o2)
CVG Operations:
4 Colour Channel Model (II)
(o1, o2)
(o1, o2)
(o1, o2)
(o2, o1)
CVG Operations:
4 Colour Channel Model (III)
operations on
spatial objects
operations on
scalar fields
operations on
scalars
(o1, o2) = ( Max(O1, O2),
Select(O1, R1, O2, R2),
Select(O1, G1, O2, G2),
Select(O1, B1, O2, B2) )
Max(O1,O2)(x) = max(o1(x),o2(x))
Select(S1,T1,S2,T2)(x) = select(s1(x),t1(x),s2(x),t2(x))
max(s1, s2) =
select(s1, t1, s2, t2) =
{
s1
s2
s1 s2
s1 < s2
{
t1
t2
s1 s2
s1 < s2
Algebraic Specification and CVG
Equational axioms on scalars extend to axioms on spatial objects.
Example: Associativity law for the CVG operation:
(o1,
(o2,o3)) =
(
(o1,o2),o3)
defined using Max, Select
Associativity of Max, Select on scalar fields
pointwise-lifting of operations
Associativity of max, select on scalars
Hierarchical Data Representation
composite volume object
(o1, o2)
o1
o2
convex
volume
object
convex
volume
object
1
CVG Tree (I)
–
–
–
–
–
CVG Syntax and Semantics
CVG Term:
Define algebraic terms and CVG term evaluation (= structural
induction) in the usual way.
Expressiveness of CVG
CVG is an algebraic framework for volume graphics.
Question: Do the CVG terms define all the spatial objects one wants?
We can show the answer is: Yes
1.
Any continuous spatial object can be approximated
by a CVG term to arbitrary accuracy.
2.
Given any computable spatial object o and an ε > 0 one
can compute a CVG term toε which approximates o to
within the error margin ε.
In fact we prove this by a general theory of spatial objects…
General Theory of Spatial Data Types: I
Algebra
The Σ-operations on A are pointwise lifted to F(X,A):
FF(X,A)(φ1,…, φn)(x) = fA(φ1(x),…, φn(x))
which preserves the equivalence of term evaluation: [t]F = [t]A
Validity Theorem: For any Σ equation t = t’ the following are equivalent:
1.
t = t’ is valid in A,
2.
t = t’ is valid in F(X,A),
Corollary: If A satisfies a set E of Σ equations then F(X,A) satisfies E.
Examples:
Axioms for commutative rings,
Axioms for CVG.
General Theory of Spatial Data Types: II
Topology
We use topology to define the notion of approximation.
C(X,A) = the set of all continuous total spatial data types from X to A
X is “any” topological space and A is a topological Σ-algebra.
C(X,A) has the compact-open topology: Basic open sets are
U
W(J,U) = {f | f[J]
U}, J compact subset of X and U open in A.
For X compact and A = R, the compact-open topology on C(X,R) is
equivalent to the topology defined by the sup norm:
|| f – g || = sup{z in X}|f(z) – g(z)|
with open sets: B(f, ε) = {g in C(X,R) : || f – g || < ε }
R
We want a “nice” function g such that
║φ–g║<ε
φ+ε
φ
g
φ-ε
K compact
Dense Subsets of C(X,R)
We say that a set D is dense in C(X,R) if for any W(J,U) we have
D
U
W(J,U) ≠ 0.
For K compact, there is a spatial object g in D arbitrarily close to any given
φ in C(K,R):
|| φ – g || < ε.
If D is dense on C(X,R) then spatial objects in D can approximate all
continuous spatial objects.
We use the Stone-Weierstrass Theorem when we deal with approximation
on a compact K, but what about non-compact X?
Completeness of Spatial Data Types
Is it possible to find a collection of spatial operators on C(X,R)
Σ = {F1,…,Fk}
and a subset B of C(X,R) consisting of continuous basic spatial objects
b1,… bn
such that every continuous spatial object in C(X,R) can be approximated by an
object t(b1,… bn) from the subalgebra
<B>Σ
generated by the operations Σ on B?
Basic Spatial Objects and Primitive
Operations
Basic spatial objects in B should have the properties:
1. separate the points of space X
2. contain a non-zero spatial object
Operations we need in Σsw
1. Addition
2. Multiplication
3. Scalar Multiplication
Approximation Theorem for Spatial Objects
Theorem: Let C(X,R) be the set of all continuous total spatial
objects, and B is a subset with Properties 1 and 2.
Using only the operations in Σsw the subalgebra <B>Σsw
generated by the repeated application of operations in Σsw
on B can approximate all spatial objects in C(X,R).
Proof Idea: Localize the problem to a compact space K, find an
approximate, and then show it works on C(X,R)
•Pick any W(K,U) in C(X,R).
•We want a term t in <B>Σsw such that [t]C(X,R)(b1,…bn) is in W(K,U).
Inverse Limit Construction
Theorem: LimI in ZC(I,R) ≈ C(X,R)
Homeomorphism: Φ(f) = (…,fK,…,fJ,…fI,…)
Sequences of restrictions directed
under set inclusion by the family Z
of all compact sets of X.
Shows that the compact-open
topology “behaves the same way”
on both sets.
Each coordinate Φ(f)(K) is the
restriction fK in C(K,R).
Proof Sketch: Restriction Homomorphism
Φ
C(X,R)
LimI in ZC(I,R)
πK
ΦK
C(K,R)
The mapping ΦK = πK ◦ Φ is a homomorphism and restricts C(X,R) to C(K,R)
The set ΦK(B) of basic spatial objects restricted to a compact K
satisfies Properties 1 and 2 on the coordinate space C(K,R).
Proof Sketch: Approximation on C(K,R)
We can approximate on a compact K, so by Stone-Weierstrass
<ΦK(B)>Σsw is dense in C(K,R).
Meaning that there is a term t in <ΦK(B)>Σsw such that
[t]C(K,R)(ΦK(b1),…, ΦK(bn)) is in W(K,U).
Since ΦK is a homomorphism:
[t]C(K,R)(ΦK(b1),…, ΦK(bn)) = ΦK([t]C(X,R)(b1,…,bn))
i.e. the term t in <B>ΣSW evaluates to the same points in C(X,R) and so
[t]C(X,R) is in W(K,U).
Goals
Extensions of the Stone-Weierstrass and spatial object approximating
theorems
Computability and effectivity issues; ‘While’ programs over C(X,A)
Graphics applications:
Discretisation D : C(R3,A) → C(Z3,A)
Rendering R: C(R3,A) → C(Z2,A)