Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
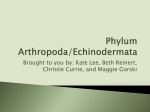
Exp Fluids DOI 10.1007/s00348-009-0631-8 RESEARCH ARTICLE Smoke visualization of free-flying bumblebees indicates independent leading-edge vortices on each wing pair Richard James Bomphrey Æ Graham K. Taylor Æ Adrian L. R. Thomas Received: 2 June 2008 / Revised: 16 January 2009 / Accepted: 5 February 2009 Ó Springer-Verlag 2009 Abstract It has been known for a century that quasisteady attached flows are insufficient to explain aerodynamic force production in bumblebees and many other insects. Most recent studies of the unsteady, separated-flow aerodynamics of insect flight have used physical, analytical or numerical modeling based upon simplified kinematic data treating the wing as a flat plate. However, despite the importance of validating such models against living subjects, few good data are available on what real insects actually do aerodynamically in free flight. Here we apply classical smoke line visualization techniques to analyze the aerodynamic mechanisms of free-flying bumblebees hovering, maneuvering and flying slowly along a windtunnel (advance ratio: -0.2 to 0.2). We find that bumblebees, in common with most other insects, exploit a leading-edge vortex. However, in contrast to most other insects studied to date, bumblebees shed both tip and root vortices, with no evidence for any flow structures linking left and right wings or their near-wakes. These flow topologies will be less efficient than those in which left and right wings are aerodynamically linked and shed only tip vortices. While these topologies might simply result from biological constraint, it is also possible that they might have been Electronic supplementary material The online version of this article (doi:10.1007/s00348-009-0631-8) contains supplementary material, which is available to authorized users. R. J. Bomphrey G. K. Taylor A. L. R. Thomas (&) Department of Zoology, Oxford University, South Parks Road, Oxford OX1 3PS, UK e-mail: [email protected] R. J. Bomphrey e-mail: [email protected] specifically evolved to enhance control by allowing left and right wings to operate substantially independently. 1 Introduction The urban myth that aerodynamicists have proven that bumblebees cannot fly can be traced back to at least 1919, when an engineer, Hoff (1919), used data from an entomologist, Demoll (1918), to suggest that animals flew using the same attached flow aerodynamics as fixed-wing aircraft. Demoll (1919) responded, using Hoff’s equations (Hoff 1919), to show that this could not be true because a bee would require a lift coefficient over twice that of any aircraft, once the speed of the beating wings was taken into account. Studies with real and model insects have since shown that they use unsteady separated flows to enhance aerodynamic force production, so in its most general sense, the ‘‘bumblebee paradox’’ may now be said to be solved (Bomphrey et al. 2005; Dickinson et al. 1999; Ellington et al. 1996; Maxworthy 1979; Srygley and Thomas 2002; Thomas et al. 2004) (for reviews, see Bomphrey 2006; Lehmann 2004; Sane 2003). Nevertheless, fundamental details of these aerodynamic mechanisms remain unresolved, and it is those which we address here. The separated flows used by insects usually involve the formation of a coherent vortical structure over the suction surface of the wing. This vortex is typically generated through separation at the leading edge, and for this reason is commonly known as a leading-edge vortex (LEV). One fundamental question for aerodynamicists is whether and how LEV topology varies with wing morphology, advance ratio, and stage of stroke. This is significant, because the topology of the LEV potentially governs such key issues as 123 Exp Fluids aerodynamic efficiency, vortex stability and control authority (Bomphrey 2006; Thomas et al. 2004). Considering only the primary vortex, the three most basic types of flow topology are as follows, each differing fundamentally in the flow at the wing root and midline of the animal: (1) a single continuous LEV spanning from left wingtip to right wingtip, with a free-slip focus over the thorax and a tip vortex trailing from each wing (Fig. 1a); (2) separate LEVs on the left and right wings, each arising from a focus at the wing root with a tip vortex trailing from each wing (Fig. 1b); (3) separate LEVs on the left and right wings, each leading into their own root and tip vortex system (Fig. 1c). Whereas the first category is likely to come closest to developing an even downwash distribution, thereby maximizing aerodynamic efficiency, the second and third categories may offer greater potential for independent operation of the left and right wings, and hence greater control authority. Stability of the LEV in each case will depend upon the rate of transport of vorticity along the vortex core, which might be promoted by the second category of LEV flow topology, resembling as it does the stable LEV of a swept-wing aircraft. Much attention has been paid to this transport of vorticity in real insects (e.g. Bomphrey et al. 2005; Bomphrey et al. 2006a, b; Ellington et al. 1996), scale models (e.g. Birch and Dickinson 2001; Ellington et al. 1996) and computational simulations (Shyy and Liu 2007), although with varying conclusions as to its importance. The first category of LEV flow topology (Fig. 1a) has been observed in a number of real insects, including freeflying butterflies (Srygley and Thomas 2002) and dragonflies (Thomas et al. 2004). The second category of LEV flow topology (Fig. 1b) has been observed in studies with mechanical models (Birch and Dickinson 2001; Ellington et al. 1996), and is likely also to occur in real insects— especially in the early stages of LEV formation (Bomphrey et al. 2005). The third category of LEV flow topology (Fig. 1c) is suggested by flow visualizations on mechanical models (Ramasamy and Leishman 2006). It is important to emphasize that while these topologies are strict alternatives at any given instant, there is no reason why insects should not transition between these topologies when moving between hovering and forward flight, or even at different stages of the wing stroke. Indeed, we have observed the LEV topology of free-flying insects to change from one to stroke to the next (butterflies: Srygley and Thomas 2002) and even within a stroke (dragonflies: Thomas et al. 2004). This ability to rapidly change kinematics, and thereby to control flow topology, may well be important in flight control. In this paper, we describe the flow topologies observed around bumblebees at different stages of the stroke and in a range of different free-flight conditions. No single image shows the entire wake topology at any stage 123 A B C Fig. 1 Three hypotheses for separated flows over insect wings. a Continuous bound LEV spanning from wing tip to wing tip with free slip focus over the body. Wing tip vortices present but no root vortices. b A conical spiral LEV structure on each wing with a focus on each wing surface close to the root. Wing tip vortices present but no root vortices, and attached flow over the body. c A separate LEV on each wing with no foci on the surfaces of the wings: instead, the LEV structures inflect into the wing tip and wing root vortices of the stroke. Rather, multiple examples are presented for each of the flow elements we describe and each are grouped according to the stage of the wing stroke cycle in which they are observed. With this technique, we can conclude for different times throughout the cycle which is the most likely gross topological structure from a number of simple hypotheses using what are in fact quite coarse features of the flow. We choose to work with real bumblebees, rather than models, because we are interested in understanding the aerodynamics of real insects, and existing models are not yet able to approach the complexity revealed in studies of insect wingbeat kinematics (Walker et al. 2008, 2009). Although modelling approaches have many advantages, the paucity of high-resolution data on insect wing kinematics has meant that modelling studies to date have necessarily used highly simplified wing kinematics. In most cases, the Exp Fluids wing is treated as a rigid flat plate, which necessarily neglects the effects of varying camber and twist. In contrast, our high-speed digital video of real bumblebees shows that their wings not only twist but also fold through up to 90° along the hinge-like row of hooks joining the leading edge of the hindwings to the trailing edge of the forewings. In consequence, rigid flat plate models cannot necessarily be assumed to replicate the flows generated by real insects. Simplified models of insect aerodynamics ought ideally to be tested against data from real insects. In recent years, we have successfully applied the quantitative flow visualization technique of Digital Particle Image Velocimetry (DPIV) to real insects (Bomphrey 2006; Bomphrey et al. 2005, 2006a, b). Nevertheless, we choose to use the qualitative technique of smoke visualization for this study, because it is better suited to describing the flow topologies of real, free-flying insects than DPIV or any available quantitative visualization technique. In particular, smoke visualization overcomes the practical difficulty of encouraging an insect to fly freely under the conditions of dim ambient lighting, bright laser illumination and volume seeding of the flow which DPIV requires. Moreover, although DPIV can yield precise measurements of the flow field, the difficulty of deriving forces from time-varying velocity vector fields has meant that the technique has rarely been used to its full quantitative potential in studying animal locomotion (Dabiri 2005; Noca et al. 1999). In consequence, we find that the classical technique of smoke visualization is well suited to our purpose of describing the flow topologies of insects. It is also worth noting in this context that all of the fundamental fluid dynamics work on the topology of 3D unsteady separated flows is based upon qualitative visualization techniques (Délery 2001; Perry and Chong 1987). 2 Experimental details A colony of approximately 100 bumblebees Bombus terrestris was trained to forage from a nest in the laboratory to a pollen and nectar source in the working section of a lowspeed wind tunnel operating at 1.2 ms-1. This pollen and nectar source was removed during experiments to avoid interfering with the flow. We used a high-resolution smokewire technique (Thomas et al. 2004) to generate a vertical plane of smoke lines with approximately 1 mm spacing (one tenth of the wing length). The primary evidence provided in this paper is smoke visualizations, and while we base our conclusions on the most comprehensive set of flow visualizations of any animal to date, it must be borne in mind that smoke visualization is an inherently qualitative technique, with restricted spatial resolution. Quantitative confirmation of the results presented here are required, for example through 3D PIV with free-flying insects. A limitation with smoke-in-air visualization is that the residence time of the smoke particles can be longer than the persistence of vorticity in the wake. This effect is known to be problematic in the far wake, where smoke streaks appear to be delineating vortices long after the vorticity has diffused (Cimbala et al. 1988). Here, however, we refer only to wake structures younger than one wing beat period (1/180 s) at a Reynolds number of Re = 2,500 (based on mean wing tip speed). Image sequences were recorded using high-speed digital video cameras aligned normal to the smoke plane acquiring data at either 1,000 fps (Hi-DCamII: NAC Image Technology, CA, USA; 1,280 9 512 px; field of view width = 85 mm; 1 px = 0.066 mm; exposure time = 1/1,000 s) or 2,100 fps (Phantom v7: Vision Research Inc, NJ, USA; 1,024 9 512 px; field of view width = 90 mm; 1 px = 0.088 mm; exposure time = 1/2,100 s). In total, we were able to visualize 511 aerodynamically informative wingbeats from 32 separate flight sequences, in which the bees performed a variety of maneuvers. In 413 of these wingbeats, the bees were travelling approximately parallel to the long-axis of the tunnel, facing either into or away from the flow. Of the remaining 98 wingbeats we observed, 78 involved quartering flight in which the bee moved diagonal to the freestream, and a further 20 in which the bee translated sideways with respect to the freestream, at airspeeds as high as 1.4 ms-1. We were able to determine the bees’ airspeed (V) while they were flying in the plane of the smoke by reference to the convection of smoke structures in the freestream of 1.2 ms-1. The bees flew at a range of airspeeds from -1.5 ms-1 (slow backwards flight) to 1.8 ms-1 (slow forwards flight). Although we did not measure stroke amplitude (U) directly, bumblebees typically operate with a stroke amplitude of approximately 2 rad (Dudley and Ellington 1990). The mean wingbeat frequency (f) across flight sequences was 180 Hz (s.d. = 13.6 Hz, n = 32 flight sequences), so the range of airspeeds we observed corresponds approximately to advance ratios in the range -0.2 \ J \ 0.2, where J = V/2UfR (Ellington 1984) and wing length (R) is approximately 10 mm. Flight with an advance ratio |J| \ 0.1 is conventionally classed as hovering, so the range of flight conditions we observed brackets hovering flight (Ellington 1984). These advance ratios are easily interpretable for forwards and backwards flight, but are of little use for the many other orientations our free-flying bumblebees adopted. For example, how should J be calculated when the bumblebee is holding station in the wind tunnel, but oriented roughly perpendicular to the incident flow? In this case, forwards– backwards velocity in the bee’s frame of reference is 123 Exp Fluids Fig. 2 Bumblebee stroke sequence in forwards flight, with arrowed c smokelines visualizing points of attachment (yellow) and reattachment (red). The smokeline which reattaches delineates the extent of a LEV formed at supination. We begin the cycle with pronation occurring immediately prior to (a): pronation occurs again in (f). Overall image brightness and contrast have been increased to best visualize the smokelines—this inevitably incurs a loss of detail on the wing surface when it is angled such that the illumination reflects back into the camera lens. Frames separated by 1 ms 0 ms-1, but the oncoming flow (from the side) is 1.2 ms-1 so a value of J = 0 would be misleading since it does not tell the full story about the flow physics. 3 Results The flow topology we observed changed through the wingbeat, but did so in a rather stereotyped manner, despite the range of flight conditions. Figure 2 presents a typical wingbeat. We found no evidence of flow separation during the first part of the downstroke (Fig. 2a) in any of our recorded sequences (further evidence in Fig. 3). However, by the time of supination at the end of the downstroke, the flow over the wings had separated to form a LEV, and that LEV persisted well into the upstroke. During supination (Fig. 2c), a point along the forward line of attachment can clearly be seen on the underside of the wing, where a smokeline impacts the wing approximately halfway along its length (yellow arrow). The smokeline directly above this one bifurcates: one branch flows into the wake behind the bumblebee; the other branch flows upstream and reattaches on the wing upper surface (red arrow), delineating a LEV over half a chord in diameter. At the beginning of the upstroke (Fig. 2d), the lines of attachment (yellow arrow) and reattachment (red arrow) remain on the underside and upperside of the wings, respectively, indicating that the circulation continues to be of the same sense following stroke reversal. However, by mid-upstroke (Fig. 2e), the LEV has been shed. The timing of LEV formation is presented for a further 10 wingbeats in Fig. 3. The first frame capturing supination is highlighted in yellow and this is always concurrent with the first unambiguous appearance of the LEV (white arrows), which indicates that the LEV is formed in the latter part of the downstroke. As we now show, the topology of the LEV matches that hypothesized in Fig. 1c at this stage in the stroke cycle. During a typical downstroke, trailing vortices are shed from both the wing tips and the wing roots. This demonstrates that the LEV is not of the form hypothesized in Fig. 1a or b. Figure 4 presents an example of quartering flight, in which the attitude of the bee makes it possible to 123 Exp Fluids Fig. 3 Three bumblebees in quartering (green background), sideways (red background) and slow forwards (blue background) flight, each oriented so the formation of the LEV (white arrow) is visualized by smoke lines. Consecutive frames read down the columns. Individual wingbeats (different columns) have been arranged so that the frames showing the first evidence for supination are aligned horizontally (yellow background). The LEV first appears in these frames (i.e. at stroke reversal) in each wingbeat where it was visualized. The third column is the same wingbeat as shown magnified in Fig. 2 123 Exp Fluids Fig. 5 Bumblebee in sideways flight, showing smokelines becoming entrained in counter-rotating wing tip vortices (red arrow) and wing root vortices (yellow arrow). Frames separated by 1 ms Fig. 4 Bumblebee in upwind quartering flight, showing wing tip vortices (red arrows, a–f) and root vortices (yellow arrows, b–f), which are shed into the wake as a vortex loop by the stage of the upstroke shown in panel (e). Wake elements shed on preceding wingbeats are arrowed in white (a). See main text for detailed description. Frames separated by 1 ms. Overall image brightness and contrast have been increased linearly 123 visualize the structure of the vortex system along the length of the wing. A helical wing tip vortex can be seen in Fig. 4a where the right wing tip has impinged on the smokelines (red arrow); the white diagonal arrows point to vortex loop elements shed by previous wingbeats. By Fig. 4b the wing has passed further into the vertical smokeline plane and a root vortex is now visible (yellow arrow). Wing tip vortices (red arrows) and root vortices (yellow arrows) continue to trail the wing one-third of the way into the upstroke (Fig. 4c), confirming again that the circulation is of the same sense as on the downstroke. However, 1 ms later (Fig. 4d), the root and tip vortices are shed as a vortex loop in the wake behind the bumblebee, indicating a change in the circulation around the wing. The shed vortex loop distorts and rotates as it convects backwards and downwards into the wake (Fig. 4d–f). Figure 5 is another example showing a bee generating a counterrotating pair of tip (red arrow) and root (yellow arrow) vortices while oriented sideways to the freestream. Although the orientation of the bees in Figs. 4 and 5 make it especially easy to see the 3D structure of the vortex system, root vortices were observed in the full range of flight modes we recorded (Movie S1). The stereotyped Exp Fluids Fig. 6 Bumblebee in forward flight with smoke incident near the midline, showing the aerodynamic independence of contralateral wing pairs. See text for commentary on arrowed structure. Frames separated by 1 ms. Overall image brightness and contrast have been increased linearly. Advance ratio, J \ 0.2 sequence of flow topologies we have described is therefore robust to large-scale changes in the direction of flow relative to the insect’s body. Further confirmation that the LEV is not of the form hypothesized in Fig. 1a is provided by the observation that smokelines running along the midline of the body pass 123 Exp Fluids Fig. 7 Cartoon to show the qualitatively different flow topologies hypothesized for insects on the basis of mechanical models (a), observed in live insects (b, c2, d1, d2), and or both (c1). (a) Shows the topology described by Maxworthy (1979) for his mechanical flapper based on the clap and fling mechanism of the Chalcid wasp. (b) Shows the topology found over the fore and hind wings of a dragonfly for 75% of the wingbeats analysed in Thomas et al. (2004)—they found several variations, but this was considered to be the ‘normal’ counter-stroking topology and was not significantly different from the in-phase wingbeat topology. (c1) and (c2) shows two topologies described for hawkmoths by Ellington et al. (1996) and Bomphrey et al. (2005), the latter suggesting that (c1) was a transient state and (c2) was the topology toward the end of the downstroke once the flow over the thorax had separated too. The bumblebee flow pattern presented in (d1—early downstroke) and (d2—late downstroke) represents a novel topology with left and right wings acting independently and a LEV forming at supination (d2). The LEV structures are therefore clearly variable and can change throughout the course of a single wing stroke in hawkmoths, dragonflies, and bumblebees. Adapted from Bomphrey et al. 2005 smoothly into the wake, rising in the upwash between the root vortices without becoming entrained by any coherent transverse vortex structure. This is the case in Fig. 6, which shows a bee flying upwind with the smoke incident near the midline. In Fig. 6a the wings are parallel with one another at the top of the upstroke. The green arrow highlights a pair of smokelines passing to the far side of the right wing pair, which is the brighter of the visible wings; the blue arrow shows a second pair of smokelines passing nearside of the body. This distortion in the vertical alignment of the smoke plane is due to flow induced by the previous wingbeat. In Fig. 6b the right wing pair cuts the upper pair of smokelines (white arrow), which quickly roll up into a well-defined root vortex (Fig. 6c–d, yellow arrow). Crucially, the lower smokeline pair (Fig. 6d, blue arrows) passing nearside close to the tip of the abdomen remains relatively unaffected as it passes the root vortex. In Fig. 6e the same pair of smokelines rises in the upwash (red arrow) between the pair of contralateral vortex loops. Only when they are several chord lengths behind the wings do these same smokelines (red arrows) become visibly disrupted by the root vortices (Fig. 6g). Smokelines passing along the midline of the body are therefore accelerated upwards slightly at the end of the downstroke under the influence of the pair of vortex loops shed by the left and right wings, but in all other respects they pass unperturbed into the wake. 123 4 Conclusions The use of a LEV has been observed in free-flying dragonflies (Thomas et al. 2004) and butterflies (Srygley and Thomas 2002), and also in tethered hawkmoths (Bomphrey et al. 2005; Ellington et al. 1996). It has been inferred in free-flying swifts (Videler et al. 2004) and hummingbirds (Warrick et al. 2005), and has been suggested by analogy with mechanical flappers of Chalcid wasps (Maxworthy 1979) and fruit flies (Birch and Dickinson 2001). A catalogue of the variation in LEV topologies observed between and within different species of insect is given in Fig. 7 (adapted from Bomphrey et al. 2005). Bumblebees’ small wings are at the limit of what can be resolved with smoke visualizations. As a result, while the near wake flows were Exp Fluids A B Fig. 8 Cartoon of the flow expected mid downstroke behind a bumblebee (left) and measured behind a desert locust (right). At the top the insects are depicted flying into the page. Red boxes (a) represent a plane aligned vertically behind the trailing edges of the insects’ wings and show a 2D slice through the flow with instantaneous streamlines. Yellow boxes (b) show the predicted downwash distribution in the same plane behind the two insects—the locust distribution being an idealized profile based on DPIV measurement (Bomphrey et al. 2006b). Grey dashed lines represent the edge of the trailing vortex cores clear, the resolution of the LEV in our flow visualizations is lower than has been achieved, for example, with dragonflies (Thomas et al. 2004). Nevertheless, the density of smoke streams was sufficient to identify the critical features of the flow topology such as bifurcations and attachment points. The bumblebee topologies we have described are shown in Fig. 7d1, d2, where d1 represents the majority of the downstroke and d2 is the topology at the end of the downstroke and beginning of the upstroke. It is apparent that bumblebees are unusual in comparison with other insects which utilize LEVs to generate lift, in that the flow appears to remain attached for the majority of the downstroke, first separating around the time of stroke reversal. This might suggest a role for wing rotation in the formation of the LEV, although we have no information as to whether this separation is the result of the angular velocity of the wing at supination or the concomitant increase in angle of attack (Walker 2002). The ultimate structure of the bumblebee LEV (Fig. 7d2) bears some resemblance to that of Maxworthy’s (1979) flapping machine (Fig. 7a) in that a LEV is present which does not terminate on the wing surface. Nevertheless, the two are distinct in that the root vortices are not linked in the bumblebee as they are in Maxworthy’s (1979) flapping machine. Although our data have insufficient temporal resolution to observe transient stages in LEV development, it is quite possible that the LEV topology we have observed in bumblebees (Fig. 7d2) develops from an attached flow topology (Fig. 7d1) via a transient state like that proposed by Ellington et al. (1996) for hawkmoths (Fig. 7c1, and hypothesized in Fig. 1b). In most other flow visualizations on birds, bats and insects to date, the left and right wing pairs are aerodynamically linked by transverse vortical structures (birds: (Kokshaysky 1979; Spedding 1986; Spedding 1987; Spedding et al. 2003; Videler et al. 2004; Warrick, Tobalske and Powers 2005); bats: (Hedenstrom et al. 2007; Norberg 1976; Swartz et al. 2005); insects: (Bomphrey 2006; Bomphrey et al. 2005, 2006b; Dickinson and Götz 1996; Grodnitsky and Morozov 1993; Lehmann et al. 2005; Maxworthy 1979; Srygley and Thomas 2002; Thomas et al. 2004; Van den Berg and Ellington 1997; Willmott et al. 1997)). In contrast, our bumblebee flow visualizations provide no evidence for such structures linking the left and right wings. The same may be true of other insect species, including crane flies, which have also been shown to generate wing root vortices in addition to the usual wing tip vortices (Brodsky 1994). This must result in a loss of efficiency, because unlike many other insects, bumblebees and crane flies are not using the full span between their wing tips to generate lift, and indeed wastefully accelerate air upwards in the vicinity of the body. Figure 8 depicts the consequences of root vortices for the downwash distribution. Figure 8a is a cartoon depicting instantaneous streamlines in a vertical plane behind the trailing edges of a bumblebee and a locust. Figure 8b is a cartoon of the corresponding downwash distributions. In the case of the locust, we have made use of quantitative DPIV measurements of the wake to inform the figure (Bomphrey et al. 2006b); in the case of the bumblebee, we have based the expected downwash distribution on a typical velocity profile through two vortex rings. While the diagrams are idealized representations of the true flows, the root vortices which are present in the bumblebee must necessarily make the downwash distribution less even than that behind the locust. Any deviation from the ideal even 123 Exp Fluids downwash distribution is a source of aerodynamic inefficiency, reinforcing our conclusion that the flow topology of bumblebees is aerodynamically inefficient at all stages of the stroke. The general conclusion over the bumblebee’s inefficiency is consistent with the conclusions Altshuler et al. (2005) drew for honeybees (Apis mellifera). While they did not observe the aerodynamics directly and attributed enhanced lift to wake capture and rapid rotation of the wings, honeybees fill a similar ecological niche and also ‘underperform’ in terms of efficiency during normal flight by operating with a shallow stroke amplitude. Why has natural selection tolerated such inefficiency? The aerodynamic independence of left and right wing-pairs in bumblebees might simply result from the biological constraint of having a wide thorax to house the massive flight motor required for their load-carrying foraging style. As a result the wing roots are widely separated in relation to the wing length, and as this ratio increases, this is bound at some point to lead to their independent operation. Alternatively, the aerodynamic independence of the wing pairs might reflect the low and negative advance ratios at which the bees flew in the sequences we have visualized. At such low airspeeds, there may simply be an insufficient flow velocity near the wing base to generate a significant circulation in comparison with that generated further out along the wing. Finally, it is also possible that the independence of left and right wing pairs might enhance control authority and could therefore represent an adaptation for manoeuvring between flowers. Acknowledgments Research sponsored by BBSRC Studentship 00A1S06405. RJB is a PD Research Fellow at St Anne’s College, Oxford. GKT is a Royal Society University Research Fellow and RCUK Academic Fellow. The authors are grateful to the BBC for loaning the Phantom high-speed digital video camera. References Altshuler DL, Dickson WB, Vance JT, Roberts SP, Dickinson MH (2005) Short-amplitude high-frequency wing strokes determine the aerodynamics of honeybee flight. PNAS 102:18213–18218 Birch JM, Dickinson MH (2001) Spanwise flow and the attachment of the leading-edge vortex on insect wings. Nature 412:729–733 Bomphrey RJ (2006) Insects in flight: direct visualization and flow measurements. J Bioinsp Biomim 1:S1–S9 Bomphrey RJ, Lawson NJ, Harding NJ, Taylor GK, Thomas ALR (2005) The aerodynamics of Manduca sexta: digital particle image velocimetry analysis of the leading-edge vortex. J Exp Biol 208:1079–1094 Bomphrey RJ, Lawson NJ, Taylor GK, Thomas ALR (2006a) Application of digital particle image velocimetry to insect aerodynamics: measurement of the leading-edge vortex and near wake of a Hawkmoth. Exp Fluids 40:546–554 Bomphrey RJ, Taylor GK, Lawson NJ, Thomas ALR (2006b) Digital particle image velocimetry measurements of the downwash 123 distribution of a desert locust Schistocerca gregaria. J Roy Soc Interface 3:311–317 Brodsky AK (1994) The evolution of insect flight. Oxford University Press, Oxford Cimbala JM, Nagib HM, Roshko A (1988) Large structure in the far wakes of two-dimensional bluff bodies. J Fluid Mech 190:265–298 Dabiri JO (2005) On the estimation of swimming and flying forces from wake measurements. J Exp Biol 208:3519–3532 Délery JM (2001) Robert Legendre and Henri Werlé: toward the elucidation of three-dimensional separation. Annu Rev Fluid Mech 33:129–154 Demoll R (1918) Der Flug der Insekten und Vögel, vol. 69. Jena, G Fischer Demoll R (1919) Zuschriften an die Herausgeber. Der Flug der Insekten und der Vögel. Die Naturwissenschaften 27:480–482 Dickinson MH, Götz KG (1996) The wake dynamics and flight forces of the fruit fly Drosophila melanogaster. J Exp Biol 199:2085– 2104 Dickinson MH, Lehmann F-O, Sane SP (1999) Wing rotation and the aerodynamic basis of insect flight. Science 284:1954–1960 Dudley R, Ellington CP (1990) Mechanics of forward flight in bumblebees: I. Kinematics and morphology. J Exp Biol 148:19–52 Ellington CP (1984) The aerodynamics of hovering insect flight. III. Kinematics. Phil Trans R Soc Lond B 305:41–78 Ellington CP, van den Berg C, Willmott AP, Thomas ALR (1996) Leading-edge vortices in insect flight. Nature 384:626–630 Grodnitsky DL, Morozov PP (1993) Vortex formation during tethered flight of functionally and morphologically two-winged insects, including evolutionary considerations on insect flight. J Exp Biol 182:11–40 Hedenstrom A, Johansson LC, Wolf M, von Busse R, Winter Y, Spedding GR (2007) Bat flight generates complex aerodynamic tracks. Science 316:894–897 Hoff W (1919) Der Flug der Insekten und der Vögel. Die Naturwissenschaften 10:162–169 Kokshaysky NV (1979) Tracing the wake of a flying bird. Nature 279:146–148 Lehmann FO (2004) The mechanisms of lift enhancement in insect flight. Naturwissenschaften 91:101–122 Lehmann FO, Sane SP, Dickinson M (2005) The aerodynamic effects of wing-wing interaction in flapping insect wings. J Exp Biol 208:3075–3092 Maxworthy T (1979) Experiments on the Weis-Fogh mechanism of lift generation by insects in hovering flight. Part 1. Dynamics of the ‘fling’. J Fluid Mech 93:47–63 Noca F, Shiels D, Jeon D (1999) A comparison of methods for evaluating time-dependent fluid dynamic forces on bodies, using only velocity fields and their derivatives. J Fluids Struct 13:551– 578 Norberg UM (1976) Aerodynamics, kinematics, and energetics of horizontal flapping flight in the long-eared bat Plecotus auritus. J Exp Biol 65:179–212 Perry AE, Chong MS (1987) A description of eddying motions and flow patterns using critical-point concepts. Annu Rev Fluid Mech 19:125–155 Ramasamy M, Leishman JG (2006) Phase-locked particle image velocimetry measurements of a flapping wing. J Aircraft 43:1867–1875 Sane SP (2003) The aerodynamics of insect flight. J Exp Biol 206:4191–4208 Shyy W, Liu H (2007) Flapping wings and aerodynamic lift: the role of leading-edge vortices. AIAA J 45:2817–2819 Spedding GR (1986) The wake of a jackdaw (Corvus-Monedula) in slow flight. J Exp Biol 125:287–307 Spedding GR (1987) The wake of a kestrel (Falco tinnunculus) in flapping flight. J Exp Biol 127:59–78 Exp Fluids Spedding GR, Rosen M, Hedenstrom A (2003) A family of vortex wakes generated by a thrush nightingale in free flight in a wind tunnel over its entire natural range of flight speeds. J Exp Biol 206:2313–2344 Srygley RB, Thomas ALR (2002) Unconventional lift-generating mechanisms in free-flying butterflies. Nature 420:660–664 Swartz S, Galvao R, Iriarte-Diaz J, Israeli E, Middleton K, Roemer R, Tian X, Breuer K (2005) Unique characteristics of aerodynamics of bat flight evidence from direct visualization of patterns of airflow in the wakes of naturally flying bats. Int Comp Biol 45:1080 Thomas ALR, Taylor GK, Srygley RB, Nudds RL, Bomphrey RJ (2004) Dragonfly flight: free-flight and tethered flow visualizations reveal a diverse array of unsteady lift-generating mechanisms, controlled primarily via angle of attack. J Exp Biol 207:4299–4323 Van den Berg C, Ellington CP (1997) The vortex wake of a ‘hovering’ model hawkmoth. Phil Trans R Soc Lond B 352:317–328 Videler JJ, Stamhuis EJ, Povel GDE (2004) Leading-edge vortex lifts swifts. Science 306:1960–1962 Walker JA (2002) Rotational lift: something different or more of the same? J Exp Biol 205:3783–3792 Walker SM, Thomas ALR, Taylor GK (2008) Photogrammetric reconstruction of high-resolution surface topographies and deformable wing kinematics of tethered locusts and free-flying hoverflies. J Roy Soc Interface. doi:10.1098/rsif.2008.0245 Walker SM, Thomas ALR, Taylor GK (2009) Deformable wing kinematics in the desert locust: how and why do camber, twist and topography vary through the stroke? J Roy Soc Interface. doi:10.1098/rsif.2008.0435 Warrick DR, Tobalske BW, Powers DR (2005) Aerodynamics of the hovering hummingbird. Nature 435:1094–1097 Willmott AP, Ellington CP, Thomas ALR (1997) Flow visualization and unsteady aerodynamics in the flight of the hawkmoth, Manduca sexta. Phil Trans R Soc Lond B 352:303–316 123