Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
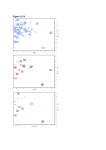
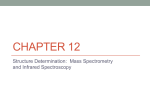
Precision limitations of radial velocity measurements of the red giants from the Penn State - Toruń Planet Search. Grzegorz Nowak,1 Andrzej Niedzielski,1 Aleksander Wolszczan,2,3 Pawel Zieliński,1 Monika Adamów1 1 2 Toruń Centre for Astronomy, Nicolaus Copernicus University, Toruń, Poland Department for Astronomy and Astrophysics, Pennsylvania State University, 525 Davey Laboratory, University Park, PA 16802, USA 3 Center for Exoplanets and Habitable Worlds, The Pennsylvania State University, University Park, PA 16802, USA Abstract Red giants represent later phase of evolution of the main sequence stars. The planet induced Doppler shifts are easy to detect in radial velocity measurements of these stars, because they have lower effective temperatures and lower rotational velocities compared to their main sequence progenitors. This offers a way to search for planets around stars that are significantly more massive than the Sun. However, when searching for planets around red giant stars with the radial velocity technique one has to take into account effects of their atmospheric activity, pulsation, or spots that can mimic planetary signatures in radial velocity measurements. In this work, we discuss methods employed for the Penn State - Toruń Planet Search (PTPS) to discriminate between the effects on radial velocity measurements of the Keplerian dynamics and those produced by the stellar atmospheric phenomena. In particular, we describe our code for simultaneous derivation of radial velocities and bisectors using the cross-correlation analysis of the red giant spectra measured with the Hobby-Eberly Telescope (HET) and the High Resolution Spectrograph (HRS). 1 INTRODUCTION The main objective of the PTPS is detection of planets around GK subgiants and giants through precision radial velocity (RV) measurements with iodine absorption cell using HET HRS spectrograph. However, the long period RV variations of red giants may also have other than planetary nature (e.g. a non-radial pulsations or rotational modulation in presence of starspots). Therefore it is important to investigate whether the observed RV variations are caused by a shift of the spectral lines or by a change of the spectral line profiles due to stellar activity. Our detailed activity discussion base on the indicators defined on the very same spectra that used for RV measurements. In this paper we present the analysis of our main activity indicator, i.e. CCF bisectors in the case of HD 17028, a potential planet hosting stars from our survey. Our survey, the observing procedure, and data analysis have been described in detail in our previous papers (e.g. Niedzielski et al. (2007)). Briefly, observations are made with the HET (Ramsey, L. W., et al., 1998) equipped with the HRS (Tull, R. G., 1998) in the queue scheduled mode (Shetrone, M., et al., 2007). The spectrograph was used in the R = 60,000 resolution mode and it was fed with a 2 arcsec fiber. The spectra consisted of 46 Echelle orders recorded on the “blue” CCD chip (4076 - 5920 Å) and 24 orders on the “red” one (6020 - 7838 Å). Typical signal to noise ratio was 200-250 per resolution element. 2 3 BISECTOR MEASUREMENTS At present most analysis of the variations of spectral lines via line bisectors base on cross-correlation function (CCF), which represents an “average” spectral line of the observed star. However, in the iodine cell method of the RV determination the I2 lines affect significantly the stellar spectrum. We may therefore construct the CCF only after proper removal of the iodine lines. The method for iodine lines removal from the stellar spectra was proposed by Martı́nez Fiorenzano et al. (2005). For our bisector analysis we use exactly the same spectra that are used for radial velocities determinations. This ensures that bisectors are contemporaneous to radial velocities. To properly remove iodine lines, the stellar spectrum is divided by the iodine flat field in each 96-pixel channel. For precisebisector measurements a new wavelength scale is applied to stellar spectra basing on I2 lines therefore the flat filed spectra are corrected in wavelength to exactly the same scale. At this stage the continuum levels in both stellar spectrum and the I2 flat field are adjusted. Finally the stellar spectrum is divided by the iodine flat field channel by channel and the result is the stellar spectrum free from I2 lines. that it is a giant with log(g) = 1.90 ± 0.14, Tef f = 4112 ± 33 K, and [Fe/H] = -0.28 ± 0.13. RVs of HD 17028 were measured at 73 epochs over the period of 2065 days between MJD 53041 and 55106 and are shown on the top panel of the Figure 3, together with the best-fit model of a Keplerian orbit. Typical precision reached was 4-9 m s−1. The residuals shown in the middle panel of the Figure 3 are charcterized by the rms value of 47 m s−1 consistent with solar-type oscillations. If the observed RV variations are indeed caused by the orbiting companion, it moves in a 597.5 day, eccentric (e = 0.35) orbit with a semimajor axis of 1.75 AU, and has minimum mas of m2 sin i = 8.4 MJ for the assumed stellar mass of 1.5 M. In the bottom panel of Figure 3 we present the bisector velocity span (BVS) and the mean as a function of RV. The BVS accuracy is typically 40-50 m s−1. The correlation coefficient between BVS and RV was found to be r = 0.1, while the critical value of the Pearson correlation coefficient at the confidence level of 0.01 is 0.3 for 71 degrees of freedom. Moreover, no significant periods are present in the periodogram of the BVS; all trial periods have extremely small significance levels. In particular, no peak is present at the RV period. Our analysis supports the planetary mass companion hypothesis. RV MEASUREMENTS We follow the general modeling approach for I2-calibrated data outlined by Butler et al. (1996). The stellar + GC (I2) spectra used for high precision RV measurements are reconstructed from the highresolution Fourier Transform Spectrometer (FTS) I2 spectrum and the high signal-to-noise stellar spectra measured without the I2 cell (templates), which we deconvolve using Jansson method (Jansson, 1984) and the instrumental profile (IP). To reconstruct the IP and correct the wavelength scale we model the pure iodine spectra (GC flats) using the FTS I2. Since the IP varies along the spectrum we subdivide the stellar spectrum into smaller channels (96 pixels or about 2 Å) and model each of these channels independently. We define the IP as the normalized sum of one central and four satellite Gaussians located 1.05 and 2.1 pixels from the central Gaussian. The free parameter are amplitudes of all the Gaussians and the width of the central Gaussian. The HWHM of the satellite Gaussians are set to 0.525 pixel. We use only the central parts (about 50% of an order) of the first 17 blue HRS orders (19 channels per order), where the signal-to-noise ratio is the highest and the rms of the differences between the final model of the iodine and iodine flatfield spectra are the smallest, typically below 0.75%. The rms of the differences between the model of a star plus iodine spectrum and the actual stellar spectrum taken with the iodine cell are usually below 1.5%. One of such fits is presented in Figure 1 where the resulting IP is presented on the bottom panel. The final RV for each spectrum is computed as a mean of all channels, after rejecting those affected by spectrum imperfections and showing unrealistic values of rms. Figure 1: An example of spectra modeling with our code. Top: The actual spectrum of HD17028 taken with the I2 cell (in red) and the final model (in green). Center: The difference between the final model and the actual spectrum. Bottom: the instrumental profile reconstructed by modeling the GC flat spectrum using the FTS. Figure 2: The illustration of the process of the creation of a mask. Top: The lines in the synthetic spectrum are identified using multismoothed second derivative of the spectrum (Savitzky, & Golay, 1964). Center: The model of the synthetic spectrum is constructed as a sum of Gaussian lines. The fitted parameters are amplitudes, HWHM and central wavelengths of the lines, which constitute the stellar mask. Bottom: Differences between the model and synthetic spectrum. To construct the CCF, the iodine free stellar spectrum is correlated with a numerical mask consisting of 1 and 0 value points, with the nonzero points corresponding to the positions of stellar absorption lines at zero velocity. We built the numerical mask using a synthetic spectrum of K2III star. The CCF of the recorded spectrum is constructed by shifting the mask as a function of the Doppler velocity. The CCF is computed step by step for each velocity point without merging the orders. For every order the algorithm selects from the mask only these lines that are suitable for given wavelength range. CCFs from all order are finally added to get the final CCF for the whole spectrum. Altogether, over 2000 spectral lines are used in the mask. In building the CCF no attempt is made to remove blended lines from the stellar spectrum. This may alter the shape of the CCF but by using many lines we are confident that the effects average out. Furthermore, as long as the same lines are used for all observations, and only variations in the shape are of interest, blended stellar lines do not affect the final result. In the CCF profile we defined top and low zones that represent most interesting places to study the velocity given by the bisector. For our span measurements we chose the lower zone between 5% and 25%, and the upper zone between 65% and 85% in the terms of the CCF depth. The changes in the spectral line bisector were quantified using the bisector velocity span (BVS), which is simply the velocity difference between mean bisector velocity in the upper and lower zone of the line bisector (BVS = VT − VB). Figure 3: RV measurements of HD 17092 and the best-fit of a single planet Keplerian model to data (T0[MJD] = 55122.74, P = 597.5 days, K = 165.39 m s−1, e = 0.35, ω = 64.1◦) (top). Center: the post-fit residuals. Bottom: BVS as a function of RVs. 5 CONCLUSIONS & PROSPECTS Our current precision of our current RV measurements pipeline is well below 10 m s−1, whereas the accuracy of the bisector measurements is 4-5 times larger. To improve our bisector measurements we plan to refine our code and additionally deconvolve the stellar spectra cleaned from the iodine lines to take into account the influence of the instrumental profile on BVS measurements and to reach in BVS precision comparable to that in RV. References Butler, R. P., Marcy, G. W., Williams, E., McCarthy, C., & Dosanjh, P. 1996, PASP, 108, 500 Jansson, P. A. 1984, Deconvolution With Applications in Spectroscopy (New York, Academic Press) Martı́nez Fiorenzano, A. F., Gratton, R. G., Desidera, S., Cosentino, R., Endl, M. 2005, A&A 442, 775 Niedzielski, A., Konacki, M., Wolszczan, A., Nowak, G., Maciejewski, G., Gelino, C. R., Shao, M., Shetrone, M., Ramsey, L. W. 2007, ApJ, 669, 1354 Ramsey, L.W., et al. 1998, Proc. SPIE, 3352, 34 4 RESULTS FOR HD 17028 The presented code was tested on HD 17028, a K0 star of V = 8.27 mag. and B-V = 1.56 ± 0.17. The atmospheric parameters indicate Savitzky, A., & Golay, M. J. E.. 1964, Analytical Chemistry, 36, 1964 Shetrone, M., et al. 2007 PASP, 119, 556 Tull, R.G. 1998, Proc. SPIE, 3355, 387