Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
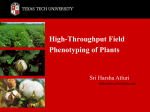
ISSCC 2016 / SESSION 11 / SENSORS AND DISPLAYS / 11.8 11.8 Chip-Scale Electro-Optical 3D FMCW Lidar with 8μm Ranging Precision Behnam Behroozpour1, Phillip A. M. Sandborn1, Niels Quack1,2, Tae Joon Seok1, Yasuhiro Matsui3, Ming C. Wu1, Bernhard E. Boser1 University of California, Berkeley, CA, 2EPFL, Lausanne, Switzerland, Finisar, Fremont, CA 1 3 Miniaturized 3D imaging systems with sub-mm precision are of high interest for applications such as high-fidelity 3D copying. 3D cameras that employ lightdetection-and-ranging (lidar) units offer better spatial and depth resolution compared to radar- and ultrasonic-based cameras [1-5]. While depth is measured in common lidar architectures using the round-trip delay of a short pulse [3] (so-called “pulsed lidar”) or the phase-delay of an intensity envelope on continuous-wave (CW) light (“amplitude-modulated (AM)-CW lidar”) [4], these architectures require sub-picosecond timing resolution and commensurate with high power dissipation and large area for sub-millimeter depth precision. In the frequency-modulated continuous-wave (FMCW) lidar, depth information is encoded in the optical frequency to achieve high-resolution ranging, independent of timing resolution. Here we report on the design, fabrication and 3D imaging results of a chip-scale FMCW lidar making use of an electro-optical phase-locked loop (EO-PLL) composed of CMOS and silicon-photonic chips to generate triangular frequency-modulated light at the output of an external tunable laser used for ranging over a 1.4m range window with 8μm precision at 50mm target distance. Figure 11.8.1 shows the basic architecture and operating principle of the FMCW lidar. The wavelength of a tunable laser is modulated electrically to follow a triangular waveform. The resulting beam is self-mixed by an asymmetric Mach-Zehnder interferometer (MZI) with one branch set by the free-space optical path to the target at unknown distance and the other consisting of a fixed length fiber that serves as a baseline reference. The frequency of the beat tone at the output of the MZI is proportional to the difference in path length and is therefore proportional to the target distance. Ranging precision is limited by laser phase noise and reaches a minimum when the target distance equals the length of the reference fiber since then the noise in the two branches is correlated and cancels. An electro-optical PLL (EO-PLL) [6] ensures constant modulation slope (γ) of the laser frequency to suppress ranging uncertainty. It consists of a chip-scale MZI with constant path length difference set by on-chip Silicon waveguides. The frequency of the beat tone at the MZI output is proportional to γ and is controlled by the input voltage of the integrator that modulates the laser wavelength. Hence, the integrator followed by the laser and the MZI/PD is equivalent to a VCO. This VCO is part of a PLL that locks the MZI beat frequency to an electronic LO to maintain constant slope γ. A hysteresis comparator senses the modulation voltage at the laser tuning input and switches the sign of the integrator at maximum or minimum levels. This inverts the slope γ of the ramp and causes a random phase jump in the beat signal between ±180°. In a conventional EO-PLL this phase error is directly injected into the phase detector, resulting in a momentary slope error and large ranging error. Choosing the switching instance at the peak of the beat signal eliminates this error. Extra delay in the optical and electrical paths causes the optimum switching instant deviate from the peak. Consequently, an adaptive tuning loop is implemented that continuously monitors the phase jump and adjusts the switch timing to minimize it. Figure 11.8.2 shows the architecture of the integrated EO-PLL consisting of the silicon photonic and CMOS chips to modulate the frequency of a 1550nm wavelength-tunable laser over 1nm (122GHz) with 5.6μs-long up and down ramps. The laser light is coupled into the silicon-photonic chip comprising the reference MZI with 330ps path delay difference and a germanium p-i-n photodiode. Ideally, the beat current from the PD is a sine wave with its frequency proportional to the slope γ of the ramp, but in practice it also has a low-frequency amplitude envelope and baseline variation due to the wavelength dependence of the laser output power. On the CMOS chip, a TIA consisting of a low-impedance input stage implemented by the gm-boosted transistor M1 and transresistance R1 amplifies and high-pass filters (M3 to M6) the current to remove the low-frequency baseline variation. The high-frequency noise content 214 • 2016 IEEE International Solid-State Circuits Conference is filtered through capacitor C1 in parallel with R1. A Schmitt-trigger removes the amplitude envelope before the PFD. A type-II PLL with 500kHz bandwidth locks the beat frequency to a 7.2MHz LO to fix the slope γ. In order to eliminate the switching error, the output of the hysteresis comparator is gated by a DFF. A digital control loop measures the error in the reference beat frequency after each switching event and adjusts the DFF clock phase with respect to the LO edge to minimize the error. The timing reference for error measurement and clocking the DFF is from the LO with a 32 times clock multiplier implemented with a charge-pump PLL. The VCO of this PLL is a ring oscillator with 4 differential stages (8 phases), that combined with the 32× frequency multiplication, generates 256 equally spaced clock edges within each LO cycle. A counter-based TDC uses these clock edges to determine the error in the beat frequency after each switching event and sends it to the control unit to select the optimal phase for clocking the DFF. The phase resolution provided by this gated-switching mechanism is ±0.7° and thus below the ±0.9° uncertainty caused by the laser phase noise. Figure 11.8.3 shows the measured slope error of the modulated laser output. The top panel shows the normalized nonlinearity for open-loop operation without the EO-PLL. The ramp-to-ramp drift of this characteristic causes 153μm-rms error at 50mm target distance. The EO-PLL eliminates this drift, but the random switching error still results in 66μm-rms uncertainty at 50mm range. With gated switching (bottom panel) the error is dominated by laser phase noise over the entire ramp period and equals 8μm-rms for a target at 50mm distance. Figure 11.8.4 shows the FMCW lidar in a ranging setup. The performance of the lidar is evaluated under two different conditions: first driving the laser open-loop without error correction and secondly with the fully integrated EO-PLL. A target with less than 5dB return loss was placed at 5cm, 30cm, and 70cm from the baseline. Five displacement steps are measured near each distance. The standard deviation calculated from 14 measurements at each step is also shown in the plots. The lidar performs 180k range measurements per second (1/5.6μs). At 5cm distance the EO-PLL improves the ranging precision 18× compared to open-loop operation. The operating range is ±70cm from the adjustable baseline or 1.4m total. Figure 11.8.5 shows a 3D image of an object placed at 40cm distance from the camera recorded by mechanically stepping the imager in 250μm steps over an area of 10×12mm2. The measured beat frequency at each step was averaged for 100μs resulting in 11μm-rms error over the entire measurement frame. Figure 11.8.6 compares this work to other solutions, showing its significantly improved depth precision without compromising depth range. Figure 11.8.7 shows the die photographs of the 180nm CMOS chip and the silicon-photonic chip with the light couplers, the MZI and the PD. Both chips occupy 3×3mm2 and are designed for assembly with TSV interconnects enabling wafer-level bonding between electronic and photonic systems. The CMOS chip consumes 1.7mA from a 1.8V supply and 14.1mA from a 5V supply. The latter includes 12.5mA bias current for the active DBR section of the tunable laser. Acknowledgement: The authors acknowledge the support of this project by DARPA under the DAHIEPHI program and thank the TSMC University Shuttle Program for CMOS chip fabrication. References: [1] P. Chen, et al., “A 94GHz 3D-Image Radar Engine with 4Tx/4Rx Beamforming Scan Technique in 65nm CMOS,” ISSCC Dig. Tech. Papers, pp. 146-147, Feb. 2013. [2] R. Pryzbyla, et al., “3D Ultrasonic Gesture Recognition,” ISSCC Dig. Tech. Papers, pp. 210-211, Feb. 2014. [3] K. Yasutomi, et al., “A 0.3mm-Resolution Time-of-Flight CMOS Range Imager with Column-Gating Clock-Skew Calibration,” ISSCC Dig. Tech. Papers, pp. 132-133, Feb. 2014. [4] A. Payne, et al., “A 512x424 CMOS 3D Time-of-Flight Image Sensor with Multi-Frequency Photo-Demodulation up to 130MHz and 2GS/s ADC”, ISSCC Dig. Tech. Papers, pp. 134-135, Feb. 2014. [5] F. Aflatouni, et al., “Nanophotonic Coherent Imager,” Opt. Express, vol. 23, no. 4, pp. 5117-5125, 2015. [6] N. Satyan, et al., “Precise Control of Broadband Frequency Chirps Using Optoeletronic Feedback,” Opt. Express, vol. 17, no. 18, pp. 15991-15999, 2009. [7] H. Arimoto, et al., “Wavelength-Tunable Short-Cavity DBR Laser Array with Active Distributed Bragg Reflector” J. Lightw. Technol., vol. 24, pp. 4366-4371, 2006. 978-1-4673-9467-3/16/$31.00 ©2016 IEEE ISSCC 2016 / February 2, 2016 / 11:45 AM Figure 11.8.1: FMCW lidar operating principle. Figure 11.8.2: EO-PLL circuit with gated switching control. 11 Figure 11.8.3: Linearizing laser modulation using EO-PLL with gated switching. Figure 11.8.4: Complete lidar architecture and its ranging performance. Figure 11.8.5: Sample 3D image from a gear with 1.1mm thickness placed at 40cm distance from the imager. Figure 11.8.6: Comparison to 3D imaging technologies. DIGEST OF TECHNICAL PAPERS • 215 ISSCC 2016 PAPER CONTINUATIONS Figure 11.8.7: Photomicrograph of the pitch-matched CMOS and photonic chips. • 2016 IEEE International Solid-State Circuits Conference 978-1-4673-9467-3/16/$31.00 ©2016 IEEE