Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
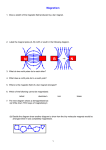
FACULTY OF ELECTRICAL ENGINEERING Nicolae Florin JURCA Claw pole synchronous generator for small electric systems -PHD THESIS(abstract) Scientific advisor. Dr. Karoly BIRO The INTRODUCTION presents the general context in which this thesis is elaborated in and then it presents briefly the chapters of this work. A new approach of the claw pole machine will be presented here. Each chapter of the thesis deals with a stage in the process of building and testing the machine used in the power conversion system, each one being closed with conclusions. CHAPTER I of this thesis is dedicated to the presentation of several types of synchronous machines with permanent magnet and the advantages of using them in the small size power generation systems. Different topologies suitable for building such a machine are presented. Prototypes of claw pole synchronous machines (existing in the research centers) and the principle of their operation are also exposed. Then, there are described the most common configurations of this type of generator used in power generation microsystems – see Figure 1.13. and Figure 1.14. magnet magnets Fig. 1.13 Rotor configuration and claw pole generator magnetic field map Fig. 1.14 Claw pole synchronous generator in modular construction Several aspects regarding the materials used in building these generators are presented in the last part of CHAPTER I. CHAPTER II presents the sizing algorithm developed for this type of generator. The two major aspects of this procedure are followed: determining geometrical dimensions of the rotor core, of the stator and of the permanent magnet, and the second aspect – selecting the type of the stator winding. The base of the design algorithm is the equivalent magnetic circuit; its constituent elements were determined. Using the finite element method, the sizing stage results verification was approached. For this type of generator, the generated rated voltage is directly proportional with the rated speed of the magnetic field of the permanent magnet. In order to obtain an efficient generator, the magnet sizes have to be determined so they supply a satisfactory excitation field E value under the saturation limit, especially under the saturation limit of the rotor core. In this type of generator approach, the most difficult aspect of the problem is the sizing of the rotor poles. These poles have an important role in closing the magnetic field lines because they assure their convergence from magnet to air gap. Because of the high concentration of magnetic lines in the transversal section of poles, the sizes should be chosen carefully in order to avoid the rotor core saturation. Based on the previously stated aspects, the premise in building the machine is the voltage produced by the generator dependent on the permanent magnet surface area and on its working point. The 1 main geometrical sizes of the generator are determined based on the power of the generator: Dis 3 60 S n 2 p 60 S n , li 2 C nN k ca 2 Dis n N A p B (2.1), (2.3) where the main notations are: l i - the stator length, Dis - the interior diameter of the stator, S n - apparent power, p - number of pairs of poles, nN - rated speed, B - average value of the flux density in the air-gap. Having the main sizes of the generator determined (its sizes are adjusted in order to be within the standard values, and, as a result, the average value of the flux density in the air-gap is recalculated), the dimensions of the rotor poles are dimensioned - figure 2.2. Fig. 2.2 The claw pole rotor – structure and notations The rotor pole width – according to bibliographical indications [P1], [M1], it is recommended: b pol (0.6 0.8) rot (2.6) where b pol - the rotor pole width in air gap (figure 2.2). The formula for the width of the pole base is determined using the formula (2.5): R flansa b1 pol 4 If the distance between the two poles, h pg , has been determined based on the formula h pg = (5 10) [P1], then the width of the pole can be modified; thus, the final value of b pol is obtained. The length of the rotor pole [P1], [H1]: l pol l rotor (0.05 0.15) 1rotor The height of the upper part of the pole: hspg (2 4) 2 (2.7) (2.8) The value should be chosen as small as possible because the flux density has a low value in this section. After setting of the main formulas for generator geometrical sizes determination, the corresponding verifications are needed. One of the most efficient verification methods implies the computation of the equivalent magnetic circuit of the generator; in this case, the magnetic field in air gap is checked in order to determine whether its value is close to the one chosen during the geometric dimensioning phase. Flanşă (2) Flanşă (1) Fig. 2.5 The magnetic field line direction in the claw pole synchronous generator and the corresponding magnetic circuit 5 R gp R ax ( Re1 R gp ) ( Rax Re 2 ) (2.29) In formula (2.29) it can be noticed that all the reluctances of the equivalent circuit have to be determined based on the below formulas: 1 l (2.30) R S 0 r (2.31) where - magnetic permeability of the environment, 0 4 10 7 - magnetic permeability of the vacuum, r - relative permeability of the environment compared to vacuum, S - area of the active zone of the volume, l - length of the active zone. The value obtained using the formula (2.48) is compared with the one chosen in the dimensioning phase (0.1 T); if B and Bc values are almost equal, then the results obtained in the two stages presented above (dimensioning method and equivalent magnetic circuit method) can be verified with the finite element method using a field calculation software. In order to obtain the most accurate results, and because of the intricate geometry of the generator, the finite element method has been applied for a quarter of the machine and respecting the symmetry and periodicity conditions; thus, the results obtained for a quarter of electrical machine correspond to the whole machine – figures 2.19 and 2.20. 3 0.25 0.2 0.15 0.1 B [T] 0.05 0 -0.05 -0.1 -0.15 -0.2 -0.25 0 10 20 30 40 [o] 50 60 70 80 90 Fig. 2.20 Map of the magnetic flux density of the rotor core Fig. 2.19 Distribution of magnetic field in airgap The value of magnetic field in air gap obtained using the finite element method is around 0.16 T, which is very close to the value chosen in the dimensioning phase. These results validate the dimensioning algorithm and confirm the efficiency of using the finite element method in the process of shaping the electric machines. CHAPTER III presents the way the second variant of the generator was dimensioned, a generator with an energetic performance higher than the one of the previous variant. The same stator is used, but the rotor is modified in order to obtain the highest possible value of the voltage and low leakage flux values, and to reduce the saturated zones and the volume of the material. In order to meet the first condition (high voltage), it is analyzed the replacement of the Alnico magnet with another type of magnet with high magnetic performance. The other three conditions impose the modification of the claw pole geometry. The most convenient method to modify the geometry, with results very easy to be visualized, is the finite element method, Flux 3 being used (in this case) thanks to the aspects showed in the second chapter. Following the phases presented above, the desired configuration was obtained; it is presented in the figure below. 0.4 0.3 0.2 B[T] 0.1 0 -0.1 -0.2 -0.3 -0.4 0 Fig. 3.13 Map of the magnetic flux density of rotor core 30 [o] 60 90 Fig. 3.14 Distribution of magnetic flux density in air-gap 4 2 (3.1) p k w w 1 82.05 [V] The phase voltage (82.05 V) (see formula 3.1) is much higher than the phase Ef voltage obtained when using Alnico magnets (57 V). CHAPTER IV presents the process of building the machine and the experimental results. Based on the results obtained in the dimensioning phase and on those obtained from the finite element method, it is created the prototype of a synchronous claw pole generator with only one stator and two different rotors; the two different rotor configurations have different permanent magnets - figures 4.11, 4.12. After the assembly of the generator, the experimental stand has been constructed in order to test the generator - figures 4.13, 4.14. Fig. 4.11 Overview of the two rotors - NdFeB Fig. 4.12 Overview of the two rotors - Alnico permanent magnet permanent magnet Fig. 4.13 Electrical scheme 5 Fig. 4.14 Experimental stand 90 60 60 40 30 20 Tensiune [V] Tensiune [V] The scope of the first measurements are made in order to validate the results obtained in Flux 3D for the two structures. Based on the data presented in the previous chapters, the value of the phase voltage is 80.05 V for the rotor with NdFeB magnet and 57 V for the configuration with Alnico magnet. For this, the claw pole synchronous generator is speeded up at nominal speed for both configurations; the voltage waveforms are recorded using the data aquisition system at a 10 kHz frequency, the results being processed in Matlab. The voltages obtained in this case are presented in figure 4.15. 0 0 -30 -20 -60 -40 -90 0.02 0.04 Timp [s] 0.06 a) 0.08 -60 0.1 0.02 0.04 b) Timp [s] 0.06 0.08 Fig. 4.15 Phase voltages at no load rated speed (750 rpm): a) rotor with NdFeB magnet, b) rotor with Alnico magnet From the graph presented above it can be observed that the generated voltage values are close to the ones obtained through calculations and finite element method. For the configuration with NdFeB, the generated voltage is 79.8 V, thus a difference of 2.2 V, so it can be confirmed that the results obtained in Flux 3D are validated. The difference of 2.2 V between the voltages is mainly due to mechanical processing, where some of the geometric dimensions of poles are slightly different than the ones obtained by the simulation program. Another cause of the difference between voltages is the computation 6 0.1 errors that might appear. In Alnico magnet case, the difference is of 1.5 V and it is due to same causes exposed above. Further, it is analyzed the generator behavior at variable speeds and, in order to do that, the U = f(n) characteristic is drawn – figure 4.17. 1 2 0 NdFeB 1 0 0 U f [V ] 8 0 6 0 ALNICO 4 0 2 0 0 0 2 0 0 4 0 0 6 0 0 n 8 0 0 1 0 0 0 1 2 0 0 [r p m ] Fig. 4.17 Characteristic U=f(n) The first test with resistive load is realized by loading the generator with an electric current of 25% of I (0.25 A). Fig. 4.20 Electric current, voltage and harmonic content: a) NdFeB configuration, b) Alnico In Alnico configuration case, the generated voltage is strongly deformed by this value of 0.25 A of the electric current because the value of the magnetic field generated by the ALNICO magnet is very low, and this leads to an increasing of the influence of the armature on the generated voltage, whose value decreases from 57 V to 47 V. The amplitude of the harmonics the is much higher in this case then before, and the 3rd harmonic has an amplitude of 42% of the fundamental. From the above aspects it can be concluded that for the Alnico configuration, the increasing of the current over this limit would lead to an excessive deformation of the generated voltage; the use of a higher load is not possible without some measures in order to reduce the armature’s reaction. When using NdFeB magnets the influence of the armature’s reaction is minimum for a current of 0.25 A. The influence of the armature’s reaction is visible for values of current of 0.75 A and at nominal value of 1 A. 7 Fig. 4.23 The generated voltage and harmonic content at nominal load of the generator – NdFeB configuration Also in this chapter measures to improve these configurations are adopted. The chapter ends with a study of the generator in case of supplying c.c to consumers. By accomplihing these tests, is is noticed the efficiency of the proposed configurations within the framework of such power microsystems. A synthesis study (in the first chapter) of the synchronous machine with permanent magnet in both classical and with claw poles constructions; a new use of the generator is proposed - generator in power mycrosystem. Development of a dimensioning algorithm for low size claw poles synchronous machine with permanent magnet, having, as primary scope, the determination of the volume of the permanent magnet and also the determination of the claw poles geometry. Determination of the equivalent magnetic circuit in no load schema for the dimensioning algorithm verification. Achievement of the numeric modelling using the Flux 3D software. Achievement of a study for the optimization of a rotor of a synchronous claw pole generator using finite element on the 3D module of the simulation software. Achievement, in practice, of the designed stator and two rotors. Achievement of the experimental testing stands. Achievement of the experimental measurements for validating the results obtained in the theoretical stages. Analysis of the behavior of the generator in different working conditions. Investigation of the possibility of using the generator as a power supply for the insulated c.c. consumers. One considers that, by this work, news ways to a future development of the generator have been opened. These are related to the increase of the performances by improving the generator structure; also, it some advanced control methods that can be implemented for these systems can be adopted. 8