Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
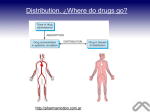
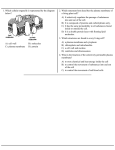
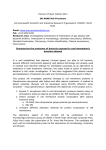
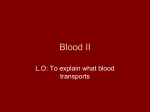
P3-1 1 Plasma Shape Reconstruction on-line Algorithm in Tokamaks V.I. Vasiliev 1), Yu.A. Kostsov 1), K.M. Lobanov 1), L.P. Makarova 1), A.B. Mineev 1), V.K. Gusev 2), R.G. Levin 2), Yu.V. Petrov 2), N.V. Sakharov 2) 1) D.V. Efremov Scientific Research Institute of Electrophysical Apparatus, St-Petersburg, 189631, Russia. 2) Ioffe Physico-Technical Institute, St-Petersburg, 189631, Russia. e-mail contact of main author: [email protected] Abstract. Plasma shape reconstruction on-line algorithm is necessary to design plasma position and shape control system in tokamaks. Algorithm aimed on solving this problem is discussed here. An example of applying of this algorithm is demonstrated with using experimental data of Globus-M discharge #10292. The results of this analysis are reported. 1. Introduction The main aim of magnetic diagnostic in tokamak devices is reconstruction of plasma boundary both for limiter and diverter plasmas. In the present article a numerical algorithm, which permits to calculate plasma column boundary in Globus-M tokamak, is described. The magnetic diagnostic system of Globus-M tokamak consists of 32 magnetic two-component probes located along vacuum vessel cross section boundary, which can measure normal and tangential components of magnetic induction, and 21 magnetic flux loops located both inside and outside of the vacuum vessel. The magnetic flux loops are used to measure loop voltage distribution close to vacuum vessel surface and these experimental data permit then to evaluate eddy current distribution in the vacuum vessel shell. Algorithm allowing to reconstruct plasma shape boundary with using mentioned above experimental data will be described below. Fig.1. Globus-M cross-section flux loops + two component probes P3-1 2 2. Problem formulation Cross-section of Globus-M machine is shown in Fig.1. Distribution of the magnetic probes and flux loops positions are presented here. Magnetic probes are marked with bold plus sign and flux loops are marked with bold dot sign respectively. Magnetic two component probes k k measure normal and tangential components of magnetic field induction ( B n , B ) in points of probes locations. Flux loops measure loop voltages that are used to estimate eddy current distribution in the vacuum vessel shell. These computed eddy currents are used by plasma reconstruction procedure. To reconstruct plasma shape boundary in tokamak Globus-M well known fixed filament current technique (for example, [1]) is used. In according with selected algorithm plasma is approximated by M current filaments with given coordinates (Rj, Zj) located inside plasma region. Unknown filament currents can be calculated by minimizing functional as follows Np B c1 k 1 k n Nl M 2 2 2 k k B n B k B c2 m m I 2J . m 1 j1 Here Bkn computed value of normal component of field induction in the point of probe location with number “k”, k B computed value of tangential component of field induction in the point of probe location with number “k”, k Bn measured value of normal component of field induction in the point of probe location with number “k”, k B measured value of normal component of field induction in the point of probe location with number “k”, I j unknown current value in the jth filament, adjustable parameter, c1, c2 relative weighs Bkn and B k magnetic field components are computed with using theoretical models of poloidal field coils and vacuum vessel. Poloidal field coil currents are measured during plasma discharge with Rogovsky coils and they are therefore known. Vacuum vessel current distribution is calculated with using loop voltages measured by flux loops on the vacuum vessel shell. Interpolating experimental measured data loop voltage can be computed for each finite element of vacuum vessel and after then current value conducting in that one. So, Bkn and B k components can be computed with using available experimental data. Minimizing residual functional filament currents can be calculated and then plasma column boundary can be reconstructed. At the limiter discharge stage plasma column boundary is closed and has even if one common point with limiter. At the diverter discharge stage plasma column boundary is coincided with magnetic flux separatrix that has X-point. It can be noted that described here procedure of plasma shape reconstruction requires coordinates of current filaments as input data. While plasma column position is uncertain during operational shot an algorithm is used to estimate roughly plasma column position and then current filaments coordinates can be initialed in the plasma current centroid region. With this aim the same plasma shape reconstruction problem is solved using so-called plasma current density moment technique for two current filaments case. P3-1 3 If to define as “measuring contour“ a curve l, which passes through magnetic probes coordinate points, then plasma current density moments can be written as following [2] 2 Ym= 0 Ik f m (rk , zk ) (Bn f m g m r B )dl k 1 l Here Ym is plasma current density moment of mth order. fm and gm are functions that determine order of plasma current density moment and they satisfy to equations as follows 2 2 2 2 f f 1 f g g 1 g *f 2 2 0, g 2 2 0. z r r r z r r r In the case when plasma current distribution is approximated with two filament currents it is required fm and gm only up to 4th order to compute coordinates of two current filaments under condition that filament currents are equal each other. Equations described fm and gm functions are presented below as following f0 = 1; g0 = 0; f1 = z; g1 = -ln(r); f2 = r2; g2 = 2z; 2 f3 = r z; g3 = -(1/2)r2 + z2; 4 2 2 f4 = -(1/4)r + r z ; g4 = -r2z + 2/3 z3. So, to compute coordinates of two current filaments it is necessary calculate plasma current moments with using experimental data and with using current filaments approach and equate each other. Solving algebraic equation system with four unknown (r1,z1) and (r2,z2), current filaments coordinates can be found. Found thus points (r1,z1) and (r2,z2) serve reference points to set plasma current filaments in vicinity of plasma current centroid region. In the described here procedure current filaments are uniformly placed along ellipse with focal points (r1,z1) and (r2,z2). The value of ellipse minor semi-axis is adjusted to have more acceptable results. Preliminary adjustment of this procedure is carried out in numerical experiments with theoretical models. 3. Test results of plasma shape reconstruction with using theoretical Globus-M model To verify developed numerical code based on described above algorithm, theoretical data of computed dynamic plasma discharge scenario were used. These data were calculated with using dynamic PET code, which can simulate plasma discharge evolution with taking into account plasma shape deformation. Bkn and B k magnetic induction components in 32 uniformly distributed points along “measuring contour” closed to vacuum vessel boundary were computed. These data serve as input data for plasma shape reconstruction procedure. Besides loop voltage values in the same points were computed too. These data were used to estimate eddy currents conducting in the vacuum vessel shell, which are required in plasma shape reconstruction process. Below results of numerical code verification are shown in Figs. 2 and 3 as examples. In Fig.2 computed and reconstructed plasma shape boundaries are presented. Maximal difference between them is estimated of 7 mm. This plasma equilibrium state corresponds to plasma discharge limiter stage. The same results are presented in Fig.3 but in the case of diverter configuration, which corresponds to diverter discharge stage. Maximal difference between theoretical and reconstructed separatrices is estimated as 17 mm. Through present analysis loop voltage along vacuum vessel boundary is approximated with spline which is constructed with using computed signals. Comparative analysis shows that obtained results of plasma shape reconstruction are acceptable and developed plasma shape reconstruction procedure can be used in practice. The model with 6 fixed plasma current filaments permits to obtain acceptable results. P3-1 4 Fig.2 Plasma eqilibrium limiter configuration in Globus-M device. t=0.025 s, 32 Bn.B - magnetic probes, max difference = 7mm, Ip = 89.95 kА. P3-1 5 Fig.3 Plasma eqilibrium diverter configuration in Globus-M device. t=0.050 s, 32 Bn.B - magnetic probes, max difference = 17mm, Ip = 216.54 кА. 4. Results of plasma shape reconstruction in Globus-M experiments. To demonstrate possibilities of the developed numerical plasma shape reconstruction code shot #10292 was taken as an example. In Figs. 4 and 5 plasma shape reconstruction results are presented. Fig. 4 corresponds to the limiter equilibrium configuration in time moment 132.257 ms and plasma current about of 168.5 kA. Diverter plasma shape configuration is shown in Fig. 5, time moment 153.758 ms and plasma current 152.3 kA. To have better-fit results plasma column is simulated here with 9 currents filaments. P3-1 6 1 2 Fig. 4. Reconstructed plasma shape boundary at limiter plasma discharge stage. 1 2 Fig. 5. Reconstructed plasma shape boundary at diverter plasma discharge stage. 7 P3-1 Conclusion Developed here plasma shape reconstructed algorithm can be useful in time between shots to analysis output data of plasma discharges. Proposed algorithm can be used as on-line algorithm in a feedback plasma shape control. References [1] Ogata A., Aicawa H., Suzuki Y., “Accuracy of plasma displacement measurements in a tokamak using magnetic probes,” Jap. J. Appl. Phys., no. 16,1, pp. 185-188, 1977. [2] Yasin I.V. PhD. Thesis, Kharkow, 1989.