Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
2010 R&E Computer System Education & Research
Lecture 9. MIPS Processor Design –
Instruction Fetch
Prof. Taeweon Suh
Computer Science Education
Korea University
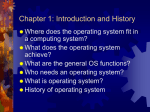
Introduction
• Microarchitecture:
How to implement an architecture
in hardware
• Multiple implementations for a
single architecture
Single-cycle
• Each instruction executes in a single
cycle
Multicycle
• Each instruction is executed broken
up into a series of shorter steps
• We don’t cover this in this class
Pipeline
• Each instruction is broken up into a
series of steps
• Multiple instructions execute
simultaneously
2
Application
Software
programs
Operating
Systems
device drivers
Architecture
instructions
registers
Microarchitecture
datapaths
controllers
Logic
adders
memories
Digital
Circuits
AND gates
NOT gates
Analog
Circuits
amplifiers
filters
Devices
transistors
diodes
Physics
electrons
Korea Univ
Processor Performance
• Program execution time
Execution Time =
(#instructions)(cycles/instruction)(seconds/cycle)
• Challenge in designing microarchitecture is to
satisfy constraints of:
Cost
Power
Performance
3
Korea Univ
Overview
• In chapter 4, we are going to implement (design) MIPS CPU
The implemented CPU should be able to execute the machine code
we discussed so far
• For the sake of your understanding, we simplify the processor
system structure
Real-PC system
CPU
FSB
(Front-Side Bus)
Main
Memory
(DDR)
Address Bus
Simplified
MIPS
CPU
North
Bridge
Data Bus
DMI
(Direct Media I/F)
Memory
(Instruction,
data)
South
Bridge
4
Korea Univ
Our MIPS Model
• Our MIPS CPU model has separate connections to
instruction memory and data memory
Actually, this structure is more realistic as we will see in
chapter 5
Address Bus
Instruction
Memory
Data Bus
MIPS CPU
Address Bus
Data
Memory
Data Bus
5
Korea Univ
Processor
• Our MIPS implementation is simplified by implementing only
memory-reference instructions: lw, sw
arithmetic-logical instructions: add, sub, and, or, slt
Control flow instructions: beq, j
• Generic implementation steps
Fetch: use the program counter (PC) to supply the instruction
address and fetch the instruction from memory (and update the PC)
Decoding: decode the instruction (and read registers)
Execution: execute the instruction
MIPS CPU
Fetch
PC = PC +4
Address Bus
Instruction
Memory
Data Bus
Address Bus
Execute
Decode
Data Bus
6
Data
Memory
Korea Univ
Instruction Execution in CPU
• Fetch
Fetch instruction by accessing memory with PC
• Decoding
Extract opcode: Determine what operation should be done
Extract operands: Register numbers or immediate from fetched instruction
• Read registers from register file
• Execution
Use ALU to calculate (depending on instruction class)
• Arithmetic result
• Memory address for load/store
• Branch target address
Access data memory for load/store
• Next Fetch
MIPS CPU
PC target address or PC + 4
Fetch
PC = PC +4
Address Bus
Instruction
Memory
Data Bus
Address Bus
Execute
Decode
Data Bus
7
Data
Memory
Korea Univ
Revisiting Logic Design Basics
• Combinational logic
Output is directly determined by input
• Sequential logic
Output is determined not only by input, but also by
internal state
Sequential logic needs state elements to store
information
• Flip-flop and latch are used to store the state information
But, avoid using latch in digital design
8
Korea Univ
Combinational Logic Examples
Adder
AND gate
Y=A+B
Y=A&B
A
A
B
+
Y
B
Arithmetic Logic Unit (ALU)
Multiplexer
Y = F(A, B)
Y = S ? I1 : I0
I0
I1
M
u
x
Y
A
Y
ALU
Y
B
S
F
9
Korea Univ
State Element (Register)
• Register (flip-flop): stores data in a circuit
Clock signal determines when to update the stored value
• Edge-triggered
Rising-edge triggered: update when clock changes from 0 to 1
Falling-edge triggered: update when clock changes from 1 to 0
Data input determines what (0 or 1) to update to the
output
Flip-flop (register)
Clk
D
Clk
Q
D
Q
10
Korea Univ
State Element (Register)
• Register with write control
Only updates on clock edge when write control
input is 1
Clk
D
Write
Clk
Q
Write
D
Q
11
Korea Univ
Clocking Methodology
• Virtually all digital systems are essentially synchronous to the clock
• Combinational logic sits between state elements (registers)
• Combinational logic transforms data during clock cycles
Between clock edges
Input from state elements
Output to the next state elements
Longest delay determines clock period (frequency)
12
Korea Univ
Building a Datapath
• Processor is composed of datapath and control
Datapath
• Elements that process data and addresses in the CPU
Registers, ALUs, mux’s, memories, …
Control
• Logic that controls operations
When to write to a register
What kind of operation ALU should do
•
Addition, Subtraction, Exclusive OR and so on
• We will build a MIPS datapath incrementally and provide Verilog
code
We adopt both structural and behavioral modeling
• Behavioral modeling describes what a module does
For example, the lowest modules (such as ALU and register files) will be designed
with the behavioral modeling
• Structural modeling describes a module from simpler modules via instantiations
For example, the top module (such as MIPS_CPU) will be designed with the structural
modeling
13
Korea Univ
Address Bus
MIPS CPU
Instruction
Memory
Data Bus
Address Bus
Overview of CPU Design
Data
Memory
Data Bus
mips_tb.v (testbench)
mips_cpu_mem.v
reset
mips_cpu.v
Address
imem.v
(Instruction
Memory)
clock
fetch,
pc
Decoding
Register
File
ALU
Memory
Access
Instruction
Address
dmem.v
(Data Memory)
DataOut
DataIn
14
Binary
(machine
code)
Data in your
program,
Stack, Heap
Korea Univ
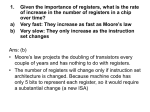
Instruction Fetch
MIPS CPU
Increment by 4 for
next instruction
4
Add
Instruction
Memory
reset
clock
Address
PC
Out
32
instruction
32-bit register (flip-flops)
•
What is PC on reset?
•
MIPS initializes the PC to 0xBFC0_0000
For the sake of simplicity, let’s initialize the PC to 0x0000_0000 in our design
How about x86 and ARM?
x86 reset vector is 0xFFFF_FFF0. BIOS ROM is located there
ARM reset vector is 0x0000_0000
15
Korea Univ
Instruction Fetch Verilog Model
4
reset
clock
Add
PC
`include "delay.v"
`include "delay.v"
`include "delay.v"
module pc (input
clk, reset,
output reg [31:0] pc,
input
[31:0] pcnext);
module adder(input [31:0] a, b,
output [31:0] y);
module mips_cpu(input
clk, reset,
output [31:0] pc,
input [31:0] instr);
always @(posedge clk, posedge reset)
begin
if (reset) pc <= #`mydelay 0'h00000000;
else
pc <= #`mydelay pcnext;
end
assign #`mydelay y = a + b;
endmodule
wire [31:0] pcnext;
// instantiate pc and adder modules
pc
pcreg (clk, reset, pc, pcnext);
adder pcadd4 (pc, 32'b100, pcnext);
endmodule
endmodule
16
Korea Univ
Memory
• As studied in the Computer Logic Design, memory is
classified into RAM (Random Access Memory) and
ROM (Read-Only Memory)
RAM is classified into DRAM (Dynamic RAM) and SRAM
(Static RAM)
DDR is a DRAM
• Short form of DDR (Double Data Rate) SDRAM (Synchronous
DRAM)
DDR is used as main memory in modern computers
• We use a simple Verilog memory model that stores
your program since our focus is on how CPU works
17
Korea Univ
Simple MIPS Test Code
• Example MIPS Assembly code
assemble
18
Korea Univ
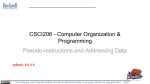
Instruction Memory Verilog Model
module imem(input [6:0] a,
output [31:0] rd);
128
words
Instruction
Memory
reg [31:0] RAM[127:0];
Word
(32-bit)
initial
begin
$readmemh("memfile.dat",RAM);
end
Compiled
binary file
7
assign #1 rd = RAM[a]; // word aligned
endmodule
Data comes out from the
address a
•
a[6:0]
20020005
2003000c
2067fff7
00e22025
00642824
00a42820
10a7000a
0064202a
10800001
20050000
00e2202a
00853820
00e23822
ac670044
8c020050
08000011
20020001
ac020054
rd[31:0]
32
memfile.dat
Depending on your needs, you can increase or decrease the memory size
Examples
•
•
For 1KB word-addressable memory, reg [31:0] RAM[255:0]
For 16KB byte-addressable memory, reg [7:0] RAM[16*1024-1:0]
19
Korea Univ
MIPS CPU with imem and Testbench
module mips_tb();
reg
reg
module mips_cpu_mem(input clk, reset);
wire [31:0] pc, instr;
// instantiate processor and memories
mips_cpu imips_cpu (clk, reset, pc, instr);
imem
imips_imem (pc[7:2], instr);
endmodule
clk;
reset;
// instantiate device to be tested
mips_cpu_mem imips_cpu_mem(clk, reset);
// initialize test
initial
begin
reset <= 1;
# 32;
reset <= 0;
end
// generate clock to sequence tests
initial
begin
clk <= 0;
forever #10 clk <= ~clk;
end
endmodule
20
Korea Univ
Simulation and Synthesis
• Instruction fetch simulation
• Synthesis
• Try to synthesis pc and adder with Quartus-II
21
Korea Univ