Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Power factor wikipedia , lookup
Ground loop (electricity) wikipedia , lookup
Control theory wikipedia , lookup
Electrification wikipedia , lookup
Electric power system wikipedia , lookup
Negative feedback wikipedia , lookup
Ground (electricity) wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Audio power wikipedia , lookup
Electrical ballast wikipedia , lookup
Power engineering wikipedia , lookup
Electrical substation wikipedia , lookup
History of electric power transmission wikipedia , lookup
Stray voltage wikipedia , lookup
Two-port network wikipedia , lookup
Control system wikipedia , lookup
Power inverter wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Current source wikipedia , lookup
Three-phase electric power wikipedia , lookup
Surge protector wikipedia , lookup
Power MOSFET wikipedia , lookup
Voltage regulator wikipedia , lookup
Voltage optimisation wikipedia , lookup
Distribution management system wikipedia , lookup
Schmitt trigger wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Alternating current wikipedia , lookup
Mains electricity wikipedia , lookup
Buck converter wikipedia , lookup
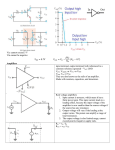
Circuit description for power supply and control of HIGH VOLTAGE, multi-cell electrolyzers. This circuit was developed/designed for powering high voltage, multi cell electrolyzers. (However, it can also be used as a high power light dimmer, motor speed controller, etc.) It employs AC phase control, using a Triac. (which is a very robust and reliable device!) Phase control necessitates the use of a random phase optoisolator Triac driver (like the MOC3021) and the design of a synchronized zero crossing detector and a current limiter. Using the components indicated on the circuit diagram, it will run comfortably at 240VAC at 10A – which is 2400W! It can be scaled up by using some components with higher ratings. Through a bridge rectifier, the phase controlled mains AC power is applied DIRECTLY to the electrolyzer! (NO transformer!) Some may not like the idea but the advantages of a transformer less circuit for this purpose FAR outweighs the disadvantage of a LIVE electrolyzer. (I am talking about a 120-150 cell, 240V unit.) LIVE or NOT, you keep your hands OFF a 240V device, AC or DC! Period! The only technical ‘problem’ I have encountered is the necessary isolation of the current limiter control signal from the ‘live’ mains. (More about this later.) Zero crossing detector: From the mains transformer’s secondary (15V), diodes D1 and D2 (4007) feed pulses to the inverting (-) input (pin 6) of the zero crossing comparator IC1B (LM324) through a voltage divider R1 (1k) and R2 (1k), clamped to +12V by Zener diode ZD1. [This is done to avoid the pulse amplitude exceeding the power supply (12V)]. The non-inverting (+) input (pin 5) is biased by R3 (100k) and R4 (470ohm) to about 56mV (0.056V). Narrow, positive pulses appear at IC1B’s output (pin7). These are fed through R5 (10k) to discharge switch transistor Q1’s (BC547) base. A constant current source [comprising of Q2 (BC 327), LED1, R6 (15k) and R7 (3k3)] is continuously charging capacitor C1 (0.1u). Q1 periodically discharges C1, thus a rising LINEAR saw tooth waveform is formed. (the fast discharge part of the waveform occurs during zero crossing of the sine wave) IC1C is a unity gain ‘voltage follower’ (low output impedance buffer). The rising saw tooth needs to be inverted so that minimum control voltage to the comparator gives minimum power output and maximum control voltage results in maximum power. (This is required by the feedback loop.) 1 The output of the unity gain buffer IC1C (pin 8) is connected to the inverting (-) input (pin 9) of the unity gain (-1) inverter IC5C (LM324). [Note that IC1 (LM324) is running on a single supply while IC5 (also LM324) needs a dual supply. (±12V)] Its non-inverting (+) input (pin 10) is connected to ground through R12 (5k1). This stage (IC5C) also performs level shift. (R9-68k, P2-10k, R11-10k) (P2 is adjusted so the bottom tip of the now falling saw tooth is at 0V.) The output of IC5C (pin 8) is connected directly to the PWM comparator’s (IC1D) inverting (-) input (pin 13). The non-inverting (+) input (pin 12) is the output power control pin. (TP16) It is connected to the output (pin 7) of error amplifier IC5B, through R8 (10k). The output of the PWM comparator IC1D (pin 14), through R14 (10k) and R15 (1k), drives the Gate of Q3 (2N7000). D3’s Anode is connected to the junction of R14 & R15. Power OFF/ON control is achieved by applying a LOW signal to the Cathode. This removes the drive signal from Q3’s Gate. (This is used for timer operation and pressure control.) The LED in the opto coupler MOC3021 (IC2) is connected between the positive supply rail and the Drain of Q3, with resistor R16 (470R) limiting the current. The remaining components around the opto coupler and the Triac are for limiting dv/dt, suppression of transients and to reduce RF interference. (C3, C4, C5, R17, R18, R19, VDR1 and L1) The Triac used here (see circuit diagram) is BTA26-600B, rated at 26A, 600V. Now to the current limiting: Current limiting a HV AC phase control circuit is a bit “tricky”! This is due to two main factors: 1. The need for isolation from the 240V mains voltage. 2. Since ‘SCR waveforms’ are distorted sine waves, measuring current (voltage) with reasonable accuracy can only be done by using a TRUE RMS – DC converter. Further, unlike ordinary negative feedback, it is needed ONLY for limiting and thus acting only in one direction: DOWN. 2 In other words: once the desired current limit is set, the feedback is to act only to REDUCE the current to the pre-set level. This means that if a connected load draws LESS than the set limit, the feedback is NOT operating and full power is applied to that load. Should the load try (for whatever reason) to draw more current than the set limit, the feedback (error amplifier) starts operating in order to maintain the set current. As mentioned above, the error amplifier’s output (IC5B-pin7) is connected to the noninverting (+) input (pin 12) of the PWM comparator (IC1D) through R8 (10k). This is the way it works: The error amplifier (IC5B) needs a reference voltage on its non-inverting (+) input. The reference voltage corresponds to the SET current limit. It is created by the low output impedance unity gain buffer IC1A, R28 (4.7k) and P1 (10k). Its output (pin 1) is connected [through R27 (10k)] to the error amplifier’s (IC5B) noninverting (+) input (pin 5). Since the P-P amplitude of the saw tooth waveform is about 8V, R28 (4.7k) limits P1’s adjustment range to just over 8V. (0 – 8V) Note: 0V on the PWM (IC1D) comparator’s control pin (12) corresponds to NO power and 8V (or higher) means FULL power which this phase control unit is able to deliver. Load current is measured by a Hall effect current sensor (ACS712T-ELC-20A) which is a 20A device, gives 2.1kV RMS voltage isolation and has a sensitivity of 0.1V/A. Thus, for 10A, it’s output is 1V. It is placed in the AC loop, between the Triac and the bridge rectifier for the cell. Its output is AC coupled (C8-0.47uF) to the input of the RMS to DC converter AD737, (IC4) through a 5:1 attenuator R20 (300k) – R21 (75k). This is due to the 200mV input limit for the AD737 in this configuration. Note that the output of the AD737 is negative. Inverting amplifier IC5A (gain of -50) converts this to positive polarity and a correct amplitude needed by the error amplifier IC5B. (Gain of -5 is to compensate for the 5:1 attenuation, plus a further gain of -10 to bring the signal to the approximately same level as the control signal for the PWM comparator.) OK. As long as the error amplifier’s inverting (-) input is LOWER than the reference voltage on its non-inverting (+) input), it goes into saturation. Then its output is about +10.75V. 3 Since this output is connected (through R8-10k) to the PWM comparator’s control pin (12), power output is at MAXIMUM. Now, should the load try to draw more current, the error amplifier’s inverting (-) input will exceed the reference voltage on its non-inverting (+) input and the amplifier comes out of saturation and adjusts its output voltage to maintain the set current limit. An ‘old fashioned’ 10A moving coil meter is used to monitor the current because of its almost perfect integration! (which is due to mechanical inertia of its coil movement) Adjust the desired current limit as follows: Turn the current limiter control P1 to MINIMUM - fully anti-clockwise. Apply power to the system. Connect the desired load. While watching the Meter, start turning P1 clockwise, SLOWLY. Observe the rising current. At the point where the current no longer increases, you have reached the natural current draw for that particular load. Now back down the setting to the point where the current stopped rising. If you connect a very HEAVY load (which would naturally draw a LOT more current than what you want), as you turn the control, the meter reading will increase all the way to the limit of the meter (10A) AND what the system is designed for. (also 10A) Naturally, you can stop the current at ANY level, up to the maximum. System fuses are rated at 15A (50% overload) just in case there is a mishap! Note that this power supply requires a MINIMUM of 60-100W load to operate. While testing a ‘stand alone’ unit (powered by its own low voltage power supply), I discovered that if the load is already connected when power is applied, there is NO regulation, which means FULL power is applied! (Without regulation, the power drawn by the electrolyzer might be FAR higher than desired and would at least result in blown fuses!) The reason for the lack of regulation at power-up is that the power supply lines are not yet stable, thus the circuit cannot be expected to work properly! ONE way to fix this is to delay the Triac control pulses for 1–2 seconds at power-up. This will allow the power supply rails to stabilize. There are many ways to introduce such a delay. 4 I choose a small MOSFET (2N7000) for the clamping of the pulses, controlled by an RC network with the correct time constant for the delay. It also functions as a fast ON/OFF switch, controlled by the pressure regulator circuit and/or the timer. This stage works as follows: MOSFET Q4 (2N7000) is connected between the input of optocoupler IC2 (MOC3021) and Ground. When its Gate voltage is close to zero (0.12V), Q4 is OPEN circuit. If a voltage greater than its threshold (about 2V) is applied to its Gate, Q4 turns ON and shorts the control pulses to Ground. Resistors R29 (100k) and R30 (10M) form a voltage divider which keeps Q4’s Gate voltage at around 0.12V. Capacitor C18 (3.3uF) is connected across R30. Before power-up, C18 is held discharged by R30. At power-up, for a moment, a discharged capacitor acts like a short circuit. Since one side of C18 is connected to the +12V supply rail, the other side will also be at almost the same voltage but only momentarily. Thus, for a brief period of time, Q4 is turned ON and shorts the control pulses to Ground. When C18 has charged up, Q4 turns OFF and circuit operation returns to normal. Q4 is also used as an electronic switch. Through R31 (1k), D4 & D5 (both 4148) and SW1 (optional, manual override switch), positive voltage is applied to Q4’s gate which turns it OFF. D3’s function is to isolate the R30-C18 network from the applied control voltage pulses. It allows rapid ON/OFF control, independent of the power-up time constant of R30-C18. Note that since the capacitance of C18 is fairly high (3.3uF) and the discharge resistor R30’s value is large (10M), after power is turned off, it takes 15-30 seconds to sufficiently discharge C18. Les Banki (Electronic Design Engineer) Water Fuel & LBE Technologies 5