Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
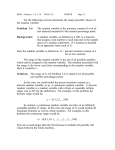
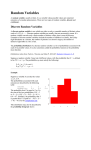
SiSy 2012 Dqtm Chapter 2, SysMod, 1 Signale und Systeme SiSy Chapter 2 System Description and Modelling References [1] P.D. Cha, J.I. Molinder, „Fundamentals of Signals and Systems – A Building Block Approach“ [2] G.Lekkas, J.Wild, „Signale und System“, ZHW-Vorlesung, 2007. Modelling Approaches SiSy 2012 Dqtm Chapter 2, SysMod, 2 Example: DC-Motor to be used in a robot arm How to drive it in order to follow a desired trajectory? Is there an output proportional to input voltage? Is there a latency in the response? How big? Model as simple as possible for required simulation Analytical Approach transparent box + physical laws Empirical Approach black box + measurements stimuli Differential Equations + BlockDiagram Response to test signals measurement Types of Systems SiSy 2012 Dqtm Chapter 2, SysMod, 3 x(t) Continuous System y(t) LTI (linear time invariant) Discrete System x[n] LTD (linear time invariant and discrete) y[n] System Description with Differential Equations SiSy 2012 Dqtm Chapter 2, SysMod, 4 Examples: Models for Mechanical Systems with Lumped Elements • Elements: – spring (Feder) & torsional/rotational spring (Drehfeder) – damper (Dämpfer) & rotational damper (Drehdämper) – mass (Masse) & inertia (Trägheit) mass moment of inertia (Massenträgheitsmoment) • Physical Laws: – relationships between force and displacement (Gesetze) • Input & Ouput: – – – – force (Kraft) & torque (Drehmoment) position (Position) & angle (Winkel) velocity (Geschwindigkeit) & angular velocity (Dreh-) acceleration (Beschleunigung) & angular acceleration (Dreh-) System Description with Differential Equations SiSy 2012 Dqtm Chapter 2, SysMod, 5 Mechanical Systems Physical Laws Element Spring Translational Rotational k [N/m] kt [N.m/rad] Fs k x Damper c [N.s/m] dx Fd c dt Mass/Inertia m [kg] d 2x Fm m 2 dt Ts kt ct [N.m.s/rad] d Td ct dt I [N.m.s2/rad] d 2 TI I dt 2 System Description with Differential Equations SiSy 2012 Dqtm Chapter 2, SysMod, 6 Mechanical Systems Examples • Example 1: spring-mass (horizontal) • Example 2: spring-mass suspended • Example 3: base excitation system • Example 4: propeller of a ship • Example 5: suspended pendulum • Exercise List 2 : mechanical and electrical systems System Description with Differential Equations SiSy 2012 Dqtm Chapter 2, SysMod, 7 Electrical Systems Physical Laws: Kirchhoff node and mesh rules, plus basic equation for passive elements R, L and C. Element Governing Equation Inductor L [H =V.s/A] (Spule) Resistor (Widerstand) Capacitor (Condensator) di vL L L dt Nature (Energy) stores energy – magnetic field R [Ω= V/A] v R iR R C [F = A.s/V] dv iC C C dt Dissipates energy stores energy – electrical charges Discrete Systems SiSy 2012 Dqtm Chapter 2, SysMod, 8 Properties • Linearity • Time Invariance • Causality Discrete Systems SiSy 2012 Dqtm Chapter 2, SysMod, 9 Description with difference equations, examples: moving average filter Discrete Systems SiSy 2012 Dqtm Chapter 2, SysMod, 10 Examples: Response of discrete systems a, b, c to a unit impulse (Kronecker Delta) Discrete Systems SiSy 2012 Dqtm Chapter 2, SysMod, 11 Examples: Response of discrete systems a, b, c to a unit step Discrete Systems SiSy 2012 Dqtm Chapter 2, SysMod, 12 Example exercises: System Modelling with Test Signals SiSy 2012 Dqtm Chapter 2, SysMod, 13 Empirical or «black-box» approach for continuous systems System Modelling with Test Signals SiSy 2012 Dqtm Chapter 2, SysMod, 14 Based on step response, identify: LPF, HPF, BPF System Modelling with Test Signals SiSy 2012 Dqtm Chapter 2, SysMod, 15 Compare step to impulse response: which relationship? Why? System Modelling with Test Signals SiSy 2012 Dqtm Chapter 2, SysMod, 16 Corresponding Frequency Responses : LPF, HPF, BPF Modelling of Discrete Systems SiSy 2012 Dqtm Chapter 2, SysMod, 17 Empirical or «black-box» approach for discrete systems Classification of discrete systems based on the impulse response Which kind of system in question 2-3? Non-recursive Discrete System (FIR) SiSy 2012 Dqtm Chapter 2, SysMod, 18 Determine Filter coefficients based on impulse response: • • Measure continuous LTI system step response and derivate to get the corresponding impulse response; Sample desired impulse response to get gs[n] • Non-zero values corresponds to filter coefficients (check delays!) Convolution (Faltung) SiSy 2012 Dqtm Chapter 2, SysMod, 19 «Sum of weighted and shifted responses» Discrete Convolution Discrete Convolution • • Operator Notation (star) Commutative Property Continuous Convolution Convolution (Faltung) SiSy 2012 Dqtm Chapter 2, SysMod, 20 Comparing discrete and continuous convolution Complex Number Notations SiSy 2012 Dqtm Chapter 2, SysMod, 21 Polar and Cartesian Notation Frequency Response SiSy 2012 Dqtm Chapter 2, SysMod, 22 Calculation method of frequency response from system’s differential equation Frequency Response SiSy 2012 Dqtm Chapter 2, SysMod, 23 Example Polar Notation Frequency Response SiSy 2012 Dqtm Chapter 2, SysMod, 24 Bode Diagram Frequency Response SiSy 2012 Dqtm Chapter 2, SysMod, 25 Bode Diagram: calculation of asymptotes and reference points Frequency Response SiSy 2012 Dqtm Chapter 2, SysMod, 26 Bode Diagram: dB scale • Powers of 2 • Powers of 10 • Slopes • Basic Terms Reference Systems SiSy 2012 Dqtm Chapter 2, SysMod, 27 First Order Reference Systems SiSy 2012 Dqtm Chapter 2, SysMod, 28 Second Order Reference Systems SiSy 2012 Dqtm Chapter 2, SysMod, 29 Second Order Example