Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
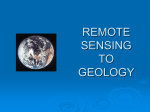
Last lecture Today’s menu Resistive sensing elements: Displacement sensors (potentiometers). Temperature sensors. Strain gauges. Capacitive sensing elements. Inductive sensing elements. Reactive Deflection bridges. Electromagnetic sensing elements. Deflection bridges. Thermoelectric sensing elements. Elastic sensing elements. Piezoelectric sensing elements. 2 1 Capacitive sensing elements Capacitive sensing elements (cont’d...) Examples General principle (A) Consider two metal plates with areas A, separated by a distance d by some dielectric medium: (B) x d x x E1 d E2 l A E (C) (D) (E) d The capacitance is then given by C= ε0 εA . d 3 4 Capacitive sensing elements (cont’d...) Capacitive sensing elements (cont’d...) Examples (cont’d..) Examples (cont’d..) (A) Variable displacement sensor: (D) Capacitive pressure sensor: C= ΔC (1 − ν 2 )a2 P. = C 16Edt3 ε0 εA . d+x (B) Variable area displacement sensor: C= (E) Differential capacitive displacement sensor: C1 = ε0 ε (A − wx). d εε0 A d+x , C2 = εε0 A d−x (C) Variable area displacement sensor: C= ε0 w [ε2 l − (ε2 − ε1 )x] . d 5 Capacitive sensing elements (cont’d...) Inductive sensing elements Capacitive sensing elements are incorporated in a.c. deflection bridge circuits or oscillator circuits. Variable inductance/reluctance sensors First, some comments on magnetic circuits: The sensor is not purely capacitive, but also has a resistance in parallel to represent losses in the dielectric. The quality of the dielectric is often expressed in terms of the loss tangent, tan δ = 6 In an electrical circuit, an electromotive force (e.m.f.) drives the current through the circuit e.m.f. 1 ωCR = current × resistance In a magnetic circuit, the magnetomotive force (m.m.f.) which drives a flux φ through a magnetic circuit is: m.m.f. = flux × reluctance = φ × . The reluctance limits the flux through the circuit, just as resistance limits current flow through an electric circuit. 7 8 Inductive sensing elements (cont’d...) Inductive sensing elements (cont’d...) The reluctance of a magnetic circuit is given by: The flux in one turn is given by ni weber φ= = i The total flux is given by where l is the total length of the flux path, n turns n2 i N = nφ = l , μμ0 A μ is the relative permeability of the circuit material, μ0 = 4π × 10−7 H/m is the permeability of free space, The self-inductance is defined as n2 N = L= i A is the cross-sectional area of the flux path. 10 9 Inductive sensing elements (cont’d...) Inductive sensing elements (cont’d...) The inductive displacement sensor The inductive displacement sensor (cont’d... L Air gap core permeability mc radius r i n turns R air gap d armature permeability mA 11 12 Inductive sensing elements (cont’d...) Reactive deflection bridges The inductive displacement sensor (cont’d... Typical capacitive bridge The total reluctance is R2 TOT = CORE + GAP + ARMATURE R3 where ETh CORE = GAP = ARMATURE = R μ0 μC r2 2d μ0 πr2 R μ0 μA rt C0 Ch VS ~ 13 Reactive deflection bridges Electromagnetic sensing elements Typical inductive bridge R These elements are used for measuring linear and angular velocity and are based on Faraday’s law. This means that if a flux N linked to a conductor is changing with time, then the back electromotive force induced in the conductor is dN , E=− dt R ETh L1 14 i.e. proportional to the rate of change of the flux N . L2 VS ~ 15 16 Thermoelectric sensing elements Thermoelectric sensing elements (cont’d...) Thermoelectric or thermocouple sensing elements are commonly used for measuring temperature. The reason for this is that, if two metals A and B are joined together, there will be a difference in electrical potential across the junction. The potential depends on the types of metal and the temperature. ETAB = a1 T + a2 T 2 + a3 T 3 + . . . For the temperature difference between two junctions, the potential difference is then ETAB − ETAB = a1 (T1 − T2 ) + a2 (T12 − T22 ) + a3 (T13 − T23 ) + . . . 1 2 A T1 The junction potential can be described by a power series of the form ETAB1 AB ET2 T2 B AB AB ET1 - ET2 18 17 Elastic sensing elements Piezoelectric sensing elements The general principle of elastic sensing elements is to convert a force to an output displacement, which is then described by a change in impedance. If a force is applied to a crystal, the atoms of the crystal are displaced from their normal positions, as x= Elastic elements are often used to measure: torque = force × distance 1 F, k where k is the stiffness of the crystal. The dynamics can be described by a second-order system. pressure = force / area acceleration = force / mass. In a piezoelectric crystal, the displacement results in a charge The dynamic behavior of these can often be described by second-order systems. See the text book for details. q = Kx = 19 K F. k 20 Piezoelectric sensing elements (cont’d...) Piezoelectric sensing elements (cont’d...) The piezoelectric effect is reversible, which means that if we apply a charge across a crystal, its dimensions will change accordingly. In order to measure the charge q the faces of the crystals are coated with metal electrodes, resulting in a capacitor, with capacitance CN = ε0 εA , t The crystal can therefore be represented as a charge generator q in parallel with a capacitance CN , or as an equivalent Norton circuit with a current source iN in parallel with CN , where iN = dq dx =K . dt dt In the Laplace domain this is (in transfer function form) ΔīN (s) = Ks. Δx̄ where A is the area, t is the thickness ε the permittivity of the crystal, and ε0 the permittivity of free space. 22 21 Piezoelectric sensing elements (cont’d...) Piezoelectric sensing elements (cont’d...) If the crystal is connected to a resistive load using a capacitive cable, we have the following system: The transfer function of the system, including the piezoelectric crystal, a capacitive cable, and a recorder is: G (s) = iN CN CC RL ΔV L = , s (CN + Cc ) + 1 ΔiN (s) and relating it to the input force we get RL ΔV L ΔiN Δx ΔV L (s) = ΔiN Δx ΔF ΔF Piezoelectric crystal Capacitive Recorder cable See the text book for the details of this derivation. The piezoelectric crystal generates a current, proportional to the velocity of a force acting on its surface. 23 24 Next lecture Summary Capacitive sensing elements. The remainder of chapter 9. Have covered only deflection bridges so far. Ideal amplifiers are covered in other courses. Read up on this, and we can focus on limitations and errors. Inductive sensing elements. Reactive Deflection bridges. Electromagnetic sensing elements. Thermoelectric sensing elements. Elastic sensing elements. Piezoelectric sensing elements. There are more details and some other examples of sensing elements in the book. Read this on your own. The elements presented at the lecture are only examples. Make sure you get the big picture. 26 25 Recommended exercises Questions? 8.14 – 8.18 8.3, 8.4, 8.11. 27 28