Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Metric tensor wikipedia , lookup
Two-body Dirac equations wikipedia , lookup
Circular dichroism wikipedia , lookup
Probability amplitude wikipedia , lookup
Euler equations (fluid dynamics) wikipedia , lookup
Perturbation theory wikipedia , lookup
Vector space wikipedia , lookup
Diffraction wikipedia , lookup
Navier–Stokes equations wikipedia , lookup
Equation of state wikipedia , lookup
Time in physics wikipedia , lookup
Equations of motion wikipedia , lookup
Derivation of the Navier–Stokes equations wikipedia , lookup
Photon polarization wikipedia , lookup
Dirac equation wikipedia , lookup
Thomas Young (scientist) wikipedia , lookup
Nordström's theory of gravitation wikipedia , lookup
Partial differential equation wikipedia , lookup
Tensor operator wikipedia , lookup
Four-vector wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
DERIVATION OF RAYLEIGH THEORY
The Rayleigh theory is derived here. The polarizabilily α is defined as the proportionality
constant between the induced oscillating dipole moment pexp(iωt) and the electric field of the
incident linearly polarized wave E0exp(iωt), where ω denotes angular frequency and t
denotes time:
(1)
On the basis of the dipole radiation theory for a « λ, the electric field of the scattered wave in
the far field (r » λ) is
(2)
where γ is the angle between the directions of the scattered light propagation and the dipole
oscillation. From Eq. (1) and (2), the scattered light intensity is
(3)
where I0 is the incident light intensity.
The incident light is assumed to propagate in the positive z direction. Thus, its electric
field lies on the xy plane. We express both the unit vector of polarization p and the unit
vector that points to the field point P from the scatterer at the origin r in terms of the unit
vectors of the Cartesian coordinates,
:
(4)
(5)
Thus, we obtain
(6)
which leads to
(7)
If the incident light is unpolarized, sin2γ needs to be averaged over angle ψ:
(8)
Hence
(9)
which is Eq. (1).
The total scattering cross section σs is defined as
(10)
Evaluating Eq. (10) with differential solid angle element dΩ = sinθdθdφ, we obtain
(11)
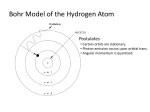
z
P
θ
o
r
y
φ
x
Figure 1 Spherical polar coordinates used for light scattering, where θ denotes the polar angle
and φ denotes the azimuthal angle.
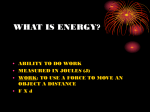
Figure 2 (a) Qs versus ka, where the dashed line represents the asymptote from the Rayleigh
theory; (b) anisotropy g versus ka.
DERIVATION OF MIE THEORY
The Mie theory is an exact solution of the Maxwell equations for a plane monochromatic
electromagnetic wave scattered by a homogeneous sphere of radius a with a relative index of
refraction nrel. An abbreviated derivation of the Mie theory is here. The general idea is to
solve the Maxwell equations inside and outside the sphere with undetermined coefficients in
the solution expansions and determine these coefficients by applying boundary conditions
on the spherical surface. The Mie theory for a cylindrical scatterer is beyond the scope of this
discussion.
We assume that all conditions for the following Maxwell equations are met:
Here, E and B are the electric and magnetic fields, respectively; n is the refractive index of
the medium; c is the speed of light in vacuum.
Vector and Scalar Wave Equations
The following vector wave equation for both E and B can be obtained from Eqs. (12)-(15):
(16)
where A represents either E or B. Each vector component satisfies the following scalar wave
equation:
(17)
Example 2.1. Derive Eq. (16) for E.
Operating from the left on both sides of Eq. (14), we obtain (E) =
-∂(B)/ ∂t. From (E) = (。E) - 2E = -2E, we get
(18)
Substituting Eq. (15) into (18), we obtain Eq. (16) for E.
Solution of Scalar Wave Equation
The standard procedure for Eq. (17) is by separation of the variables. Let ψ(x, t) = X(x)T(t),
where x represents the spatial coordinates. Substituting this expression into Eq. (17) and
dividing both sides by XT, we obtain
(19)
The left-hand side of this equation is a function of only x, whereas the right-band side is a
function of only t; thus, the two sides must a constant, which is termed a separation variable
constant; this constant is denoted by -β2. The time-dependent part can be expressed as
(20)
where ω = βc/n. Sillce ω is the angular frequency of the wave, we have β = k = nk0, where k
and k0 are the propagation constants in the medium and in vacuum, respectively. The solution
of Eq. (20) is
(21)
The pair of braces represents a linear combination of the two functions inside. The spatially
dependent part is a scalar Helmholtz equation
2X + k2X = 0, (22)
which can be expressed in spherical coordinates as
(23)
Letting X = R(r)Θ(θ)Φ(φ), substituting it into Eq. (23), and then dividing the equation by
R(r)Θ(θ)Φ(φ), we obtain
(24)
Multiplying Eq. (24) by r sin θ, we see that the third term on the left-hand side depends only
on φ, whereas the other terms are independent of φ. Thus, we let
2
2
(25)
Thus, we have
(26)
which has the following solutions:
(27)
From condition Φ(0)= Φ(2π), we have m=0, ±1, ±2, ... The rθ-dependent part from Eq. (24)
is
(28)
Multiplying this equation by r2, we see that the first and fourth terms depend only on r,
whereas the other terms are independent of r. Letting
(29)
we have
(30)
and
(31)
where z=cosθ. The solutions of Eq. (30) are
(32)
Here, l is an integer; jl(x) and yl(x) are the spherical Bessel functions of the first and second
kinds, respectively, given by
(33)
(34)
The solutions of Eq. (31) are
(35)
where Pl,m(cosθ) and Ql,m(cosθ) are the associated Legendre polynomials of the first and
second kinds, respectively.
Recalling that Ψ(x,t) = X(x)T(t) and X = R(r)Θ(θ)Φ(φ), we obtain the solution of the
scalar wave equation [Eq. (17)] in spherical polar coordinates:
(36)
We use exp(iωt) from the linear combination of the time-dependent factors for the phasor
expressions of the waves. Of course, we can also use exp(-iωt) consistently. Function
Ql,m(cosθ) is dropped off because it has singularities at θ∈{0,π}. For a wave inside the sphere,
function yl(nk0r) is dropped off because yl(nk0r) → -∞ when r→0. For an outgoing spherical
wave outside the sphere, the spherical Hankel function of the second kind hl(2)(nk0r) is chosen
because of its asymptotic behavior:
(37)
Therefore, we use
(38)
If exp(-iωt) is used, the spherical Hankel function of the first kind hl(1)(nk0r) should be used
instead for the outgoing spherical wave.
Theorem Relating Solutions of Scalar end Vector Wave Equations
From Eq. (17), the time-independent scalar wave equation is given by
2X + n2k02X = 0, (39)
which has the following solutions:
(40)
Similarly, from Eq. (16), the time-independent vector (the vector Helmholtz equation) is
given by
(41)
The solution to the vector Helmholtz equation can be found from the following theorem. If X
satisfies the scalar wave equation [Eq. (39)], vectors Mx and Nx, defined by
(42)
must satisfy the vector Helmholtz equation [Eq. (41)], where Mx and Nx are related by
(43)
The full components of Mx and Nx are
(44)
(45)
(46)
(47)
(48)
(49)
Equations (47) can also be expressed as
(50)
If u and v are two solutions to the scalar wave equation, and Mu , Nu, Mv, and Nv are the
derived vector fields, the spatial components of the solutions of the vector wave equations are
(51)
The components of E and B can thus be written in terms of the scalar solutions u and v and
their first and second derivatives.
Example 2.2. Show that vector Mx defined by Eq. (42) satisfies the vector wave equation
given by eq. (41).
Multiplying rand then operating from the left through Eq. (39), we obtain
(52)
From the vector identity
(53)
we derive
(54)
Also
(55)
The first, third, and fourth terms on the right-hand side can be evaluated as follows:
(56)
(57)
(58)
Therefore, Eq. (55) becomes
(59)
From Eqs. (54) and (59), we obtain
(60)
We also obtain
(61)
Merging Eqs. (52), (60), and (61) yields
(62)
which shows that Mx is a valid solution of the vector wave equation.
Example 2.3. Verify me relationships in Eqs. (44)-(46).
From the vector operation of curl in spherical coordinates
(63)
we obtain
(64)
which can be rewritten as Eqs. (44) - (46).
2B.4 Solution for Coefficients from Boundary Conditions
The origin of the coordinates is set at the center of the spherical scatterer. The positive z axis
is set along the propagation direction of me incident wave. The x axis is set in me plane of
electric vibration of the linearly polarized incident wave. Solutions u and v are chosen in the
following forms:
1. For the incident plane wave outside the spherical particle, we have
(65)
(66)
where k represents the propagation constant of the background.
2. For the scattered wave outside the spherical particle, we have
(67)
(68)
where al and bl arc coefficients to be determined.
3. For the wave inside the spherical panicle, we have
(69)
(70)
where cl and dl are also coefficients to be determined.
To determine these coefficients, we substitute solutions E and B from Eqs. (65) – (70) into
the following boundary conditions:
(71)
Here, un is the unit vector perpendicular to the boundary surface; subscripts o and i represent
the outside and inside, respectively.
2B.5 Scattering Efficiency and Anisotropy
Substituting the asymptotic cxpression of the spherical Hankel function of the second kind
into Eqs. (67) and (68) leads to
(72)
(73)
The resulting field components are
(74)
(75)
The amplitude functions are given by
(76)
(77)
where
(78)
(79)
The scattering efficiency Qs defined as the ratio of the scattering cross-sectional area σs to the
physical cross-sectional area πa2, can be expressed in terms of the amplitude functions:
(80)
Following the integration over φ in Eqs. (81) and (82) can be completed using the
orthogonality relations of πl and τl.