Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Vol. 112, No. 987
The American Naturalist
September-October 1978
PREDATION AND RESOURCE PARTITIONING I N O N E PREDATOR-TWO PREY MODEL COMMUNITIES Department of Biology, University of California, Los Angeles, California 90024
Gause's Law, or the compe'titive exclusion principle (Hardin 1960), states that two
competing species can coexist only if they exploit their environment differently. Historically, the kinds of differences many ecologists have considered necessary for competitive coexistence are differences in the species' utilization of resources. MacArthur and
Levins (1964) and Rescigno and Richardson (1965, 1967) have formalized this line of
thinking into the one resource-one species principle, and MacArthur and Levins (1967)
May and MacArthur (1972), May (19746) and Roughgarden (1974) have derived
theoretical limits as to how similar the resource requirements of coexisting competitors
can be. All of these ideas are based on analysis of theoretical systems consisting only of
competing species. This body of theory has provoked considerable empirical examination (reviewed by Schoener 1974) in a wide variety of taxa and environments of resource
partitioning by similar, presumably competing sympatric species.
Studies on predators in several natural and laboratory settings have seemed to show,
by contrast, that competitive coexistence can result from predation: by preventing any
one prey species from becoming sufficiently abundant to outcompete the others, the
predator makes it possible for all to coexist (Dayton 1971; Dayton et al. 1974; Harper
1969; Neil1 1975; Paine 1966, 1974; Porter 1972, 1974; Zaret 1972a). This result implies
that competing prey species can coexist even with exactly identical resource requirements and seems to contradict Gause's Law.
These two sets of disparate findings appear to indicate that competing species'
coexistence rests to a greater or lesser degree on their general ecological and particularly
their resource utilization differences, depending on the relative importance of predation
in the system.
In this paper I develop models of one predator-two prey communities with a view
toward defining properties of the interaction which make predation-induced prey
coexistence possible. The result, in concert with the findings of May (1971) and Cramer
and May (1972) on Lotka-Volterra equations and of Poole (1974) on Leslie-Gower
equations, is that circumstances d o exist under which the predator can make prey
coexistence occur. As I shall show, however, all of these require differences between the
prey, and most involve differences in resource utilization.
The fact that a predator cannot make possible the coexistence of two identical
competing prey is illustrated by (but not restricted to) the Lotka-Volterra representation of the three-species interaction given by
Amer Natur 1978. Vol 112, pp 797-813
Q 1978 by The University of Chlcago 0003-0147'78'1287-0002$01 58
798
T H E AMERICAN NATURALIST
The two prey ( N , and Nz), identical by virtue of the equality of their r's, K's, h's, and c's,
by themselves exhibit no stable equilibrium point or limit cycle (since their isoclines
coincide). The eventual extinction of one species through random perturbations is
certain. The three-species system (1) is no more stable (the prey isoclines still coincide).
Therefore, the presence of the predator (P) does not eliminate the need for the
competitors to be somehow different to coexist.
T o determine whether a particular difference between the two prey can lead to their
coexistence, I make them identical in all respects except for the difference under study.
Treated here are three kinds of differences between the prey: differences in prey refuges,
differences which evoke frequency-dependent predation, and differences in the species
against which the prey direct their principal defense mechanisms. In all cases, the use by
the two prey of those resources which would become limiting in the absence of
predation remains identical. First, as a prelude to what follows, I discuss briefly one
predator-one prey models to clarify the general stabilizing properties of prey carrying
capacity and variable per capita predation rates. Next I present one predator-two prey
models in which prey coexistence results from prey refuges or frequency-dependent
predation rates. Then I discuss a model in which coexistence obtains through one prey
being a better competitor and the other being better at avoiding predation. Finally, I
shall draw from these models implications about Gause's Law and the importance of
competition and predation in structuring ecological communities.
I. STABILIZING EFFECTS OF PREY CARRYING CAPACITY A N D
VARIABLE PER CAPITA PREDATION RATE
A group of species can coexist only if their interactions include stabilizing forces
which prevent any species from going extinct. It is well known that prey carrying
capacity and a per capita predation rate which increases with prey density constitute
such forces which tend to stabilize predator-prey systems of varying degrees of complexity (May 1972, 1973; Maynard Smith 1974; Maynard Smith and Slatkin 1973; Murdoch
and Oaten 1975; Oaten and Murdoch 1975a; Rosenzweig 1971; Tanner 1975).
Consider a prey (N) and predator (P) which interact according to the Lotka-Volterra
predation equations with a prey carrying capacity term added,
P
=
P(cbN - d).
At equilibrium, N* = dlbc and P* = (r/hK)(K - N*). Clearly, the predator can exist
with the prey only if the prey carrying capacity term is greater than equilibrium prey
population size, or K > dlbc. It is well known that this equilibrium point is stable, that
its stability depends on the fact that K is finite, and that stability declines as K becomes
quite large.
Consider now a Lotka-Volterra predator-prey interaction in which the per capita
predation rate depends on the number of prey present,
where 0 ~f (N) < 1 for N > 0. Terms of varying degree of specificity analogous to f (N)
have been used by others (e.g., De Angelis et al. 1975; Holling 1965; Ivlev 1961; May
1972, 1973; Maynard Smith 1974; Watt 1959) to represent the so-called predator
799
PREDATION AND RESOURCE PARTITIONING
functional response term in which predation rate declines with increasing prey due to
predator satiation. In the present context f ( N ) is used more broadly to include any
property of the environment, prey, or predator which acts through prey numbers to
produce a variable per capita predation rate.
At equilibrium, f (N*)N* = dlbc, and f (N*)P* = rlb, and both species exist as long as
f ( N * ) > 0. The equilibrium is stable only if [if ( N ) / i N ] * > 0, i.e., if the per capita
predation rate on the prey increases with increasing prey numbers. Such a situation will
arise if, e.g., there exist hiding places for the prey of varying quality such that as prey
become increasingly common their susceptibility to predation increases.
As a particular example of such a variable rate, consider an environment with a prey
refuge of size R, such that only those prey in excess of R are available to the predator.
That is,
+
In this case, the equilibrium point is stable and is given by N* = R (dlbc) and
P* = (cr/d)N*.Gause (1934)early recognized the stabilizing effect of a prey refuge, and
Connell (1970) provides an example from nature in which the spatial refuge of the
barnacle Balanus glandula in the higher intertidal may contribute to the stability of its
interaction with the predatory snails Thais.
T o summarize the foregoing, a finite prey carrying capacity can stabilize a predatorprey interaction by preventing prey from becoming too abundant. A variable per capita
predation rate can also stabilize the interaction, and if so it operates by preventing the
prey from becoming too rare.
11. ONE PREDATOR A N D TWO PREY:
VARIABLE PER CAPITA PREDATION RATES
Two prey may differ in such a way that they are exposed to different variable per
capita predation rates. The system (1) is modified to
P = P[cW'I(NI,N2)Ni + cbfz(N1, N2)N2 - dl,
where 0 5 f,, f 2 < 1 for all N,, N 2 > 0. To insure that neither prey is uniformly more
exposed to predation than the other (a case considered later), I further specify that f ;
and f 2 are formally identical with N 1 and N 2 reversed; i.e., if the abundances of the two
prey are reversed, their per capita mortality rates are also reversed.
As before, in the absence of the predator, the two prey cannot coexist. The special
symmetry of ( 5 ) and of thef,'s guarantees that with the predator present the equilibrium
prey densities are equal. If N* = NT = NT and f * = fl(NT, NT) = f;(NT, NT), the
equilibrium condition is f *N* = d/2bc and f *P* = (r/bK)(K- 2N*), which exists only
if K > 2N*. As is shown in the Appendix, this point is stable if the addition of a prey
individual of either species to the system results in (a) an initial decrease of both prey
and increase of the predator and (b) a greater increase in its own per capita predation
rate than in that of its competitor. By analogy with system (3),stability arises because
neither prey can become too rare.
800
T H E AMERICAN NATURALIST
Two particular per capita predation rate terms of special interest are shown in the
Appendix to satisfy these stability criteria. In the first case, each prey has its own
separate refuge of size R. Each f i is of the form (4) and therefore depends on Ni only. The
equilibrium condition is given by N* = R + (d/2hc) and P* = (2rc/dK)N*(K - 2N*)
and exists only when K > 2R + (dlbc), i.e., when prey carrying capacity is enough larger
than the combined size of the refuges to provide food to the predator. The fact that the
prey refuges are separate requires that they exist in physically different locations. Thus,
stable predator-induced prey coexistence in this case depends on the prey choosing
different places to hide Lrom the predator.
In the second case, the per capita predation rate on each prey species increases with
that species's fraction of the total prey population. Such frequency-dependent predation
has been called apostatic prey selection or predator switching (Murdoch 1969), and the
predator eats common prey disproportionately often. Specifically, the predation rate
terms are given by
where increasing values of the arbitrary positive constant z indicate increasing predator
preference for the more common prey. The equilibrium point is N* = 2 " ' d J b c and
P* = (2'r/bK)(K - 2N*) which exists only if K > 2"d/bc, i.e., if K is large enough with
respect to z that the predator can obtain food. Biologically, a predation rate such as (6)
requires not just that the predator be behaviorally sophisticated enough to discriminate
between prey species but also that the prey species be different in some way that makes
such discrimination possible. It seems that the degree of frequency-dependent predator
selectivity, i.e., the magnitude of z , should increase as the prey become increasingly
different.
Frequency-dependent predation can arise through several mechanisms. These are
reviewed by Murdoch and Oaten (1975), and some are formulated in specific mathematical terms by Oaten and Murdoch (1975b) and Steele (1974) who argue that switching
may not always stabilize complicated systems. Frequency-dependent predation has been
shown to be possible if prey differ only in appearance (Manly et al. 1972) but in most
documented cases the prey also differ in where they occur, and predator switching
results from changes in foraging location (Murdoch et al. 1975; Murdoch and Oaten
1975; additional references listed by Roughgarden and Feldman 1975).
To summarize this section, variable predation rates can lead to predation-lnduced
coexistence of otherwise identical competing prey species. Two mechanisms which can
produce such stabilizing predation are prey refuges and frequency-dependent predatory
behavior. Coexistence in such cases depends on both the presence of the predator and
the existence of differences between the prey, usually involving their spatial distributions, which influence predation rate.
111. ONE PREDATOR A N D TWO PREY:
INTERFERENCE COMPETITION A N D UNEQUAL PREDATION
Two otherwise identical competing prey may differ in the species against which they
direct their main defense mechanisms. One prey may concentrate on the other by
secreting a chemical or employing a behavior pattern or growth form which reduces the
other prey's growth rate more than its own. Through interference competition, this prey
would be able to drive the other to extinction in the absence of the predator. The second
prey may be better able to avoid the predator than the first by being distasteful or harder
PREDATION AND RESOURCE PARTITIONING
1
I
I
1
I
,002 .004 .006 ,008 E
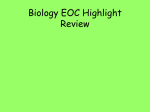
FIG.1.-Parameter space as represented in the E . K plane, divided into six regions in
which system (7) exhibits different asymptotic properties. The equilibrium conditions for
the regions containing the following points are: A, prey 1 alone; B, prey 1 and the
predator; C. prey 1, prey 2. and the predator at a stable equilibrium point; D, prey 1, prey
2, and the predator with persistent oscillations; E, prey 2 and the predator; F. prey 1 and
the predator or prey 2 and the predator, depending on initial conditions. Arbitrarily
selected values of the other parameters are cc = 1.5. h = 0.01, c = 0.5. d = 1, i. = 1.
0 to find or capture. Formally, the one predator-two prey Lotka-Volterra system (1) is
modified to
where x > 1 measures the interference effect of the superior competitor N 1 on N 2 , and
0 I c 5 b measures the predator-avoidance advantage of N 2 over N 1 .
The behavior of the dynamical system (7) is the richest and most mathematically
complicated of all systems considered thus far. There exist five possible outcomes of the
interaction, depending on the parameters, and two of these involve three-species
coexistence. Parameter space as represented in the c, K plane is divided into six regions
with different asymptotic properties in figure 1. The lines dividing these regions each
depend on several of the parameters. Analytical examination of the various equilibria
appears in the Appendix, and simulated examples are given in figure 2. These six regions
will now be discussed in turn.
The prey carrying capacity can be so low that prey occur in insufficient density to
support the predator. With the predator absent, the predation resistance of prey 2
confers no benefit, and the system ultimately consists of only the superior competitor at
802
T H E AMERICAN NATURALIST
TIME
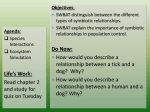
FIG.2.-Simulations of systems ( 7 ) and (8). The parameter values used are indicated in
fig. 1. A-E, system ( 7 ) with E and K given by points A-E in fig. 1; F , and F,, system ( 7 )
with E and K given by point F i n fig. 1 and different initial conditions; G, system (8) with E
and K given by point D in fig. 1 and prey 1 refuge size R = 200.
abundance NT = K . This situation occurs throughout the region in figure 1 containing
point A and is simulated in figure 2A.
As K grows larger but remains still small enough to fall in the region of figure 1
containing point B, the predator can invade the system. Its population size remains
sufficiently small, however, that the competitive superiority of prey 1 overwhelms the
predation resistance advantage of prey 2. The equilibrium community, therefore,
consists of only prey 1 and the predator at abundances NT = dlbc and P* = (rlb)x
[l - ( N T I K ) ] .This case is simulated in figure 2B.
As K grows quite large, so as to fall within the region of figure 1 containing point E,
by contrast, the predator becomes so common as to cause the predation resistance of
prey 2 to overwhelm the competitive advantage of prey 1. As figure 2E shows, prey 1
cannot exist in the system, and prey 2 and the predator occur at equilibrium abundances
N t = d/[(b - E ) C ] and P* = [r/(b - ~ ) ] [-l ( N t I K ) ] .
The region in figure 1 containing point F has two alternative stable equilibria. Here K
is large enough to support the predator, and the predation resistance of prey 2 is small.
It appears that the balance between the different advantages of the two prey is such that
only one prey can exist with the predator. Depending on initial conditions, the winning
PREDATION AND RESOURCE PARTITIONING
803
TIME
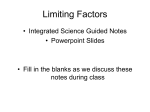
FIG.2 (Continued)
specles can be prey 1, as In figure 2F,, where NT = dlbc and P* = ( r / b ) [ l- ( N T I K ) ] ,
or it can be prey 2, as in figure 2F,, where Ng = dl[(b - E ) C ] and
P* = [rl(b - & ) ] [ I - ( N T I K ) ]
When K is large enough to support the predator, and prey 2 has high predation
resistance, the result of system (7) 1s the coexistence of the predator and both prey
species; but the nature of their coexistence depends on the value of K . When K is small,
such as at point C in figure 1, coexistence occurs at a stable equilibrium point, as shown
in figure 2C. The point is given by N: = [ [ ~ (-b E ) ] ( K- {d/[(b- ~ ) c ] ) ) ] l [ b-( bs ) x
(a- 1 ) - c2],N: = dl[(b - ~ ) c ] (bc/d)NT,and P* = { [ r ( r- l ) ] / s K ) N : .
As K grows large enough to fall within the region of figure 1 containing point D, the
stability of the three-species equilibrium point vanishes, but three-species coexistence
continues in the form of perpetual fluctuations in species numbers. As figure 2 0 shows,
the balance of competitive and predatory forces in this region seems to insure that the
numerical domination by one species invites its replacement by another. When prey 2
with its well-developed predation resistance is common, the predator dies back paving
the way for invasion by its preferred prey, prey 1. Prey 1 reduces prey 2 through
preemption of now rare resources, but its commonness and lack of protection from
predation invite a population increase in the predator. The predator in turn reduces
prey 1, thereby causing its own subsequent population crash through starvation and
allowing the resurgence of prey 2. Figure 2 0 shows that this process continues in a series
804
T H E AMERICAN NATURALIST
of quasi-cycles with a period about an order of magnitude longer than that of
fluctuations associated with other regions in parameter space. I d o not know whether
the trajectory approaches a truly periodic stable limit cycle.
Several insights into the interrelations between predation and competition emerge
from this observed behavior of system (7). Most conspicuously, in keeping with Paine's
(1966) natural example, predation in this system can make possible the coexistence of
competitively incompatible prey. Their coexistence depends on the presence of the
predator. It also hinges critically on the differences between the two species in their
interspecific defense. Coexistence ensues only if the predation resistance of one prey is
great compared with the competitive interference of the other. Therefore, the three
species of system (7) co-occur only in a comparatively small region of parameter space, a
finding coincident with those of May (1971), Cramer and May (1972), and Poole (1974).
If predator resistance of the inferior competitor is too small, either one prey or the other,
or perhaps either depending on initial conditions, will exist alone with the predator. The
region of alternative stable equilibria is reminiscent of the findings of Schoener (1976) in
purely competitive theoretical systems.
The relative importance of competition for resources and predation on the competitors in determining equilibrium community composition depends on the productivity of
the environment in relation to predator-induced equilibrium prey densities. When the
resource levels are such as to support prey near their predator-prey equilibrium levels,
both excess resource and predators are rare. Success is bestowed upon that competitor
(or, in nature, that set of competitors) best able to survive on scarce resource. In a highly
productive environment, by contrast, predation keeps prey well below the level supportable by the resource, excess resource abounds, the ability to survive on scarce resource is
of little advantage, and success befalls that competitor (or set of competitors) best able
to resist predation. The assertions are illustrated by the regions in figure 1 containing the
points A, B, and E.
Comparison of the regions in figure 1 containing the points A, B, and C (and D)
dramatizes a possible relation between the productivity and predation theories of
species diversity discussed by Pianka (1966). For this particular value of 8 in this system,
as productivity (K) increases, so does the number of species in the community. The
mechanism underlying that increase is predation. The second species added to the
community upon increasing K is the predator which eats the first species. Pressure on
the resource is thereby minimized such that a further increase in K leads to the invasion
of a second prey which can exploit resource left over by the first. It may be that some
observed correlations between productivity and species diversity in nature result from
the increased importance of predation with increasing productivity.
Comparison of regions A through D in figure 1 also reveals one more case of the
so-called paradox of enrichment first noted by Rosenzweig (1971) and subsequently
mentioned directly or indirectly by May (1972, 1973), Maynard Smith and Slatkin
(19731, Tanner (19751, and others. The level of resource, K, constitutes the only
stabilizing element in the system (7). As mentioned in Section I, an increase in K
decreases its stabilizing ability such that other forces in the system can alter not only the
specific composition of the equilibrium but also its stability. Figures 2A through 2 0
show that as K increases the system passes from a highly stable one-species community
through a somewhat less stable two-species community and through a conspicuously
less stable three-species community to an intrinsically wildly oscillatory three-species
system.
This last case appears quasi-cyclic and therefore resembles the purely interference
competition system studied by Gilpin (1975). Because of extremely low population sizes
(especially of the predator) between population peaks, however, stochastic effects are
PREDATION AND RESOURCE PARTITIONING
805
highly likely to produce temporary extinctions. Thus, notwithstanding the "cycles" of
the deterministic system ( 7 ) in nature one would expect such a system to exhibit highly
irregular sequences of extinctions and reinvasions, all on a very long time scale.
Accordingly, with even minor stoehasticity, system ( 7 ) can produce a situation of
) totally different population
"chaos" similar to that described by May ( 1 9 7 4 ~for
models. It is not impossible that something like this mechanism might be involved in
some irregular pest "outbreaks" such as the recent upsurge of the predatory starfish
Acnrlthaster in the Pacific, which is thought by some (e.g., Dana et al. 1972) to have
resulted from natural causes.
The persistent fluctuations at point D result from relaxing the power of the only
stabilizing element in the system. Natural communities probably contain several
stabilizing elements which operate simultaneously but in different ways. These may
transform the community ( 7 ) with the parameters of point D into an altogether stable
system. If, for example. prey 1 has a refuge, then system ( 7 )becomes
[ ;,
fi2=N2 I--RN,
P
=
- LKN 2 - ( b - i ) P ] .
(8)
+
P [ c b f ( N 1 ) N 1 c(b - c ) N 2 - dl,
withf ( N , ) given by (4).This modified system ( 8 )now contains two stabilizing elements:
K, which keeps the prey from becoming too common: and K , which keeps prey I from
becoming too rare. As is argued in the Appendix and simulated in figure 2G, this change
with suitable choice of refuge size can produce a highly stable three-species equilibrium
point. In addition to stabilizing the system, by preventing the extinction of prey I the
refuge undoubtedly substantially extends that region of parameter space characterized
by predator-induced competitive coexistence. That extension, of course, results from the
added difference in how the prey use their environment.
T o summarize: if two otherwise identical prey differ in their interspecific defense
strategies, stable predator-induced competitive coexistence may occur. That outcome is
only one of several possible, however, and requires a rather precise balance of opposing
forces in the system. Other possible outcomes are stable coexistence of various subsets of
the three species, alternative stable two-species equilibria, and persistent three-species
oscillations. Though all parameters of the system affect its outcome. particularly
important is prey carrying capacity which determines the degree of stability of the
system and the relative roles of competition for resources and predation in determining
equilibrium species composition. The stability of the three-species equilibrium and the
parameter range over which it occurs can be increased by adding other stabilizing
elements to the system. When three-species coexistence does occur, it results both from
the presence of the predator and the existence of differences between the prey.
IV. DISCUSSION
In all of the three-species theoretical systems examined, a predator can make possible
the stable coexistence of two prey which cannot co-occur in its absence. This coexistence
ensues even though the prey make identical use of those resources which, in the absence
of predation, would become limiting. Roughgarden and Feldman (1975)have produced
the same conclusion from a different starting point. The present models consider only
some of the complications to standard Lotka-Volterra models which should produce
806
T H E AMERICAN NATURALIST
this effect and are known to occur in nature. Predator-induced prey coexistence should
therefore be commonplace; and indeed natural examples of the importance of predators
in determining community species composition are accumulating about as rapidly as
ecologists look for them (Brooks and Dodson 1965; Dodson 1974; Hurlbert et al. 1972;
Maguire et al. 1968; Sprules 1972; and references in introductory paragraphs above).
It is also true that predator-induced prey co-occurrence in these theoretical systems
depends absolutely on the existence of some sort of difference between the prey species.
Therefore, Gause's Law that two competing species must be somehow different to
coexist remains just as true when predators are present and important to the community
as when they are absent. Some of these differences d o not involve the use of resources.
Others, such as habitat-preference which evoke frequency-dependent predation and
especially differences in prey refuges, d o involve use of different resources by the prey.
These seem to occur in the most widely known natural cases of predator-induced prey
coexistence.
In the well-known rocky intertidal studies of Paine (1966, 1974), the superior
competitor and preferred prey Mytilus, which is kept rare enough by the predator
Pisaster that other prey can exist in the system, differs from those other prey by having a
large spatial refuge in the higher intertidal. The studies of Zaret (1972u, 1972h) on two
morphs of a planktonic cladoceran and their fish predator also reveal that the superior
competitor and preferred prey has a spatial refuge from the predator not shared to a
significant extent by the other morph. The work of Huffaker and Kennett (1959)
discussed by Harper (1969) concerns a competitively superior weed whose herbivorous
beetle keeps it rare, thereby allowing other plants to coexist. The beetle, however, is
excluded from shady areas, where the weed enjoys a refuge from predation. All of these
cases, of course, involve additional complications. The central point for present purposes is that the various prey exhibit differences in the use of the habitat (a resource)
which, just as in theoretical system (8) may stabilize the multispecies system. Thus, these
systems in which predation is known to maintain prey species diversity not only
illustrate Gause's Law but also exhibit resource partitioning by the prey just as
prominently as purely competitive systems do.
It is harder to determine the importance of predators in systems which have been
studied solely from the viewpoint of resource partitioning. What can be said is that the
observed resource partitioning between similar species implies nothing about the
relative roles of competition for resources and predation in structuring the communities.
Populations d o not fall neatly into classes limited by resources, by predators, or by
any other single limiting factor. Rather, populations occur as components of communities whose interspecific interactions guarantee that any change in the physical or
biological factors which impinge directly on any one population will cascade through
the entire community changing, to greater or lesser degrees, the equilibrium levels of all
component populations. Even in the simplified system (8), e.g., any change in the
productivity of the environment (K), or the size of the refuge of prey 1 (R), or the
removal of the predator will cause changes in both prey populations.
Similarly, communities (except perhaps those few lacking predators altogether)
cannot be separated into those whose species coexistence depends on resource partitioning alone or on predation alone. The apparent dichotomy reflects little more than the
different emphases of the investigators who study different communities. I suspect that
wherever predators occur (and predators are nearly ubiquitous in nature), both predation and resource partitioning probably play major roles in determining community
composition.
Finally, since species differences permitting competitive coexistence can involve
mechanisms far more complex than partitioning of a single one-dimensional resource, I
PREDATION AND RESOURCE PARTITIONING
think the search for some universal
species is fruitless. Rather, I view as
observed species characteristics and
coexistence and community structure
807
numerical limit to the similarity of competing
far more informative studies of how particular
interspecies interactions contribute to species
and stability.
V. SUMMARY
Models of the dynamics of a predator and two competing prey are examined for
conditions under which the predator's presence makes competitive coexistence possible.
Despite the fact that the prey in the absence of the predator exploit identical resources,
predation-induced coexistence can occur; but its occurrence depends on the prey being
different in at least one of several ways. Suitable differences include differences in spatial
refuges from the predator, differences in appearance and/or location which induce
frequency-dependent predation, and a difference in energy allocation between competitive and predatory defense. Thus these models predict, in keeping with the results of field
studies on predators, that predation can play a central role in determining community
species composition. However, prey species coexistence still depends on their being
somehow different; i.e., Gause's Law is just as true when predators are common and
important as when they are absent.
Most of those prey in nature whose coexistence is known to depend on predation
differ in resource use; i.e.. these prey appear to partition environmental resources just as
is expected of coexisting species in predator-free systems. A large proportion of cases of
coexistence of similar species in nature probably results not from resource partitioning
alone or from predation alone but from both mechanisms operating simultaneously.
ACKNOWLEDGMENTS
I wish to thank D. M. Wiberg for help and encouragement with the mathematics in
this paper and J. Ebersole and R. T. Paine for their critical comments on the manuscript.
APPENDIX
This section exhibits the neighborhood stability analysis of the systerns ( 5 ) and (7) and
partial treatment of the system (8). The community matrix A = [(?;Ni/i?Nj)*]
is presented for each equilibrium point, where prey 1, prey 2, and the predator are species 1,2,
and 3, respectively. The coefficie~itsof the characteristic equation I A - ),I ( = i3
a l i2 a 2 i a3 together with the quantity a , a2 - a , are shown. The equilibrium
point is locally asymptotically stable if the Routh-Hurwitz stability conditions a , > 0,
a3 > 0, and a , a2 - a3 > 0 are met.
+
+
+
f:
-
= , f Z = f *. The equilibrium point is given by
At equilibrium, NT = NT = N* and
f * N * = d/2hc and f *P* = ( r I b K ) ( K- 2N*), which exists if K > 2N* and f * > 0. If
"11
(?fl.l?Nl)* = (if2/?N2)* and m2 (2fl @ N 2 ) * = ( ? f 2 f 2 N 1 ) * t, hen the community matrix is given by
808
T H E AMERICAN NATURALIST
The coefficients of the characteristic equation are
and
The Routh-Hurwitz criteria are satisfied if
which constitute sufficient conditions for the stability of the equilibrium point. A glance
at the community matrix reveals that the first three conditions are satisfied if a prey
individual of either species added to the equilibrium community produces an initial
decrease of both prey and an increase of the predator. By definition of m1 and m 2 ,the
fourth condition is satisfied if an added individual of either prey increases the per capita
predation rate on that prey more than the per capita predation rate on the other.
If both prey enjoy refuges of size R, the f,are given by (4). The equilibrium point
becomes N* = R + (dJ2bc)and P* = (2rcldK)N*(K - 2N*), which exists if K > 2R +
(dlbc),and ml = RIN*' and m2 = 0 , which satisfy the general stability conditions.
If frequency-dependent predation of the form (6) occurs, the equilibrium point is
N* = 22- 1 dlbc and P* = (2"rIbK)(K- 2N*), which exists if K > 2'dlbc, and
ml = z/2'+'N* and m2 = - m l , which satisfy the general stability conditions.
There exist eight possible equilibrium points corresponding to the various combinations of presences and absences of the three species. Of these, (0, 0, 0 ) and (0, N9, 0 ) are
unstable, and (0, 0, P*) and (NT,N9,O) with N:, NT, P* > 0 d o not exist. The remaining
: turn.
four possibilities are treated ?n
1. The point (N:, 0 , 0 ) is given by N: = K , and the community matrix is
[jr
-r
-(x;
1)r.
-';"
bcK - d
The coefficients of the characteristic equation are
al
=
]
ar. - (bcK - d),
a2 = (a - 1)r2- ar(bcK - d).
a3 =
- (rl
- 1)r2(bcK- d ) ,
PREDATION AND RESOURCE PARTITIONING
and
a l a 2 - a 3 = rli[(bcK - dl2 - ar(bcK
-
809
d ) + (a - l ) r 2 ]
The Routh-Hurwitz stability criteria are satisfied if (bcK - d ) < 0 , and, as indicated in
figure 1. the equilibrium condition involving only prey 1 exists and is stable when
K < dlbc.
2. The point (N:, 0 , P*) is NT = dlbc and P* = (~.lb)[l
- ( N T I K ) ] ,which exists only
if K > dlbc. The community matrix is
and the coefficients of the characteristic equation are
and
It is clear that if a 3 > 0, then a l > 0 and a l a 2 - a 3 > 0 also. Thus the stability condition
is (2 - l ) r ( N : I K ) - ( v ~ l b ) [-l ( N T I K ) ]> 0, which reduces to E [ K- (dlbc)]< (dlc)x
(a - 1). As shown in figure 1, the equilibrium point involving prey 1 and the predator
exists and is stable above the line K = d / b c and below the hyperbola
E [ K- (dlbc)]= (dlc)(a- 1).
3. The point (0. Nq, P*) is given by N t = d/[(b- E ) C ] and P* = [r/(b- E ) ] x
[ l - ( N t I K ) ] .It exists only if ( b - E ) K> d j ~Tlie
. community matrix is
and the coefficients of the characteristic equation are
8 10
T H E AMERICAN NATURALIST
and
Except on the axis t: = 0 the Routh-Hurwitz stability criteria are met throughout the
region of parameter space in which the point exists. In figure 1, the equilibrium point
involving prey 2 exists and is stable above the hyperbola ( b - s ) K = d / c and to the right
of the axis s = 0.
4. The point (NT, NT, P*). In system ( 7 ) both prey populations have finite upper
limits, and therefore it is impossible for any population to become infinite. Furthermore,
there exist no two-species limit cycles. The preceding arguments document that no
stable equilibrium point involving the absence of one or more species exists in the region
of parameter space in figure 1 to the right of the two hyperbolae. The only remaining
possibility is that the three species coexist in this region. Their coexistence may involve
either a stable equilibrium point or persistent oscillations.
The three-species equilibrium point is given by
Note that P* exists whenever NT exists. Note also that in both the regions above and
below the two hyperbolae of figure 1 it is not possible for both NT and NT to be positive.
Therefore in these regions the three-species equilibrium point does not exist. The point
does exist to the left and to the right of the two hyperbolae, however, inasmuch as in
these regions NT and N': can be simultaneously positive.
The community matrix is
and the coefficients of the characteristic equation are
but I have been unable to reduce a l a z - a 3 to a simple form. The coefficient a l is
positive wherever the equilibrium point exists. The coefficient a , is negative if [b(h - E ) x
(2 - 1 ) - s2] > 0, which occurs to the left of the intersection point of the two hyperbolae
in figure 1. Thus. the three-species equilibrium point is an unstable saddle point to the
81 1
PREDATION AND RESOURCE PARTITIONING
left of the hyperbolae, and the system will always converge either to ( N T , 0 , P*) or
(0, N z , P*), depending on initial conditions.
To the right of the two hyperbolae in figure 1, the equilibrium point exists and a l > 0
and a3 > 0. The curve separating region C, in which a , a2 - a3 > 0. from region D, in
which a , a2 - a3 < 0 , was determined by iteration using the particular parameter values
of figure 1. Thus, in region C the three-species equilibrium point exists and is stable. In
region D the only remaining possibility is persistent oscillations in species numbers.
These two regions can be separated analytically in the special case of prey 2 being
completely immune to predation, i.e., E = b. The three-species equilibrium point in this
case is NT = dibc, N f = K - rNT, and P* = {[(x - l ) r ] j b ) ( N T / K ) ,which exists if
K -- rNT > 0. The coefficients of the characteristic equation become
and
Now, a l > 0 and a3 > 0 wherever the point exists. Furthermore, wherever the point
exists the second term in braces in the equation for a , a , - a3 is always negative and
becomes more negative as K increases. As K grows beyond a certain point (the endpoint
of the iterated curve in figure I ) , a , a2 - a3 becomes negative, and the stability of the
equilibrium point vanishes.
I restrict analytical treatment to the special case in which prey 2 is immune to
predation, E = b. The three-species equilibrium point is NT = R (djbc),
N: = K - E N ? , and P* = [[rc(x- l ) ] i d K ) N T 2 , which exists only if N: > 0 or
K > x [ R (dibc)].T he community matrix is
+
+
and the coefficients of the characteristic equation are
(x - 1)r2
a2 = -N T N f (Rbc dK2
and
8 12
THE AMERICAN NATURALIST
Provided the equilibrium point exists, a l > 0 and a3 > 0. Furthermore, a , a2 - a , > 0 if
R is greater than a number which is somewhat smaller than dlhc. Thus, sufficient
conditions for the existence and stability of the three-species equilibrium point when
prey 2 is completely immune to predation are R > dlbc and K > x [ R + (dlbc)].Note
that all equilibrium population sizes depend on R and that a value of R sufficient to
guarantee stability greatly extends the range of K over which stable coexistence is
possible.
LITERATURE CITED
Brooks, J. L., and S. I. Dodson. 1965. Predation, body size, and composition of the plankton.
Science 150: 28-35.
Connell. J. H. 1970. A predator-prey system in the marine intertidal region. I. Balar7lrs gla~ldulaand
several predatory species of Thais. Ecol. Monogr. 40:49-78.
Cramer. N. F., and R. M. May. 1972. Interspecific competition, predation, and species diversity: a
comment. J. Theoret. Biol. 34 : 289-293.
Dana, T. F., W. A. Newman, and E. W. Fager. 1972. Acanthaster aggregations: interpreted as
primarily responses to natural phenomena. Pacific Sci. 2 6 : 355-372.
Dayton, P. K. 1971. Competition, disturbance, and community organization: the provision and
subsequent utilization of space in a rocky intertidal community. Ecol. Mongr.
4 1 : 351-389.
Dayton, P. K.. G . A. Robilliard, R. T. Paine, and L. B. Dayton. 1974. Biological accommodation in
the benthic community at McMurdo Sound, Antarctica. Ecol. Monogr. 4 4 : 105-128.
De Angelis. D. L., R. A. Goldstein, and R. V. O'Neill. 1975. A model for trophic interaction.
Ecology 56 : 881-892.
Dodson, S. I. 1974. Zooplankton competition and predation: an experimental test of the sizeefficiency hypothesis. Ecology 55 : 605-613.
Gause, G. F. 1934. The struggle for existence. Williams & Wilkins, Baltimore.
Gilpin. M. E. 1975. Limit cycles in competition communities. Amer. Natur. 109: 51-60.
Hardin. G. 1960. The competitive exclusion principle. Science 131:1292-1298.
Harper. J. L. 1969. The role of predation in vegetational diversity. Pages 48-62 ill G . M. Woodwell
and H. H. Smith, eds. Diversity and stability in ecological systems. Brookhaven National
Laboratory, Upton, N.Y.
Holling, C. S. 1965. The functional response of predators to prey density and its role in mimicry and
population regulation. Mem. Entomol. Soc. Can. 45. 60 pp.
Huffaker, C. B., and C. E. Kennett. 1959. A ten-year study of vegetational changes associated with
biological control of Klamath weed. J. Range Manage. 1 2 : 69-82.
Hurlbert. S. H., J. Zedler, and D. Fairbanks. 1972. Ecosystem alteration by mosquitofish (Gambusia
qfirlis) predation. Science 175 : 639-641.
Ivlev, V . S. 1961. Experimental ecology of the feeding of fishes. Yale University Press, New Haven,
Conn.
MacArthur, R. H., and R. Levins. 1964. Competition, habitat selection, and character displacement
in a patchy environment. Proc. Nat. Acad. Sci. 51:1207-1210.
.1967. The limiting similarity, convergence. and divergence of coexisting species. Amer.
Natur. 101 : 377-385.
Maguire, B.. Jr., D. Belk, and G . Wells. 1968. Conrol of community structure by mosquito larvae.
Ecology 49 : 207-210.
Manly, B. F. J.. P. Miller, and L. M. Cook. 1972. Analysis of a selective predation experiment.
Amer. Natur. 106: 719-736.
May, R. M. 1971. Stability in multispecies community models. Math. Biosciences 1 2 : 59-79.
.1972. Limit cycles in predator-prey communities. Science 177: 900-902.
.1973. Time-delay versus stability in population models with two and three trophic levels.
Ecology 54 : 315-325.
.1974a. Biological populations with non-overlapping generations: stable points, stable
cycles, and chaos. Science 186: 645-647.
19746. O n the theory of niche overlap. Theoret. Pop. Biol. 5:297-332.
.-
PREDATION AND RESOURCE PARTITIONING
8 13
May, R. M., and R. H. MacArthur. 1972. Niche overlap as a function of environmental variability.
Proc. Nat. Acad. Sci. 6 9 :1109-1 113.
Maynard Smith. J. 1974. Models in ecology. Cambridge University Press, New York. 146 pp.
Maynard Smith, J.. and M. Slatkin. 1973. The stability of predator-prey systems. Ecology
5 4 : 384-391.
Murdoch. W. W. 1969. Switching in general predators: experiments on predator specificity and
stability of prey populations. Ecol. Monogr. 39:335-354.
Murdoch. W. W.. S. Avery, and M. E. B. Smyth. 1975. Switching in predatory fish. Ecology
56:1094-1105.
Murdoch. W. W., and A. Oaten. 1975. Predation and population stability. Advance. Ecol. Res.
9:l-131.
Neill, W. E. 1975. Experimental studies of microcrustacean competition, community composition
and efficiency of resource utilization. Ecology 5 6 : 809-826.
Oaten. A,. and W.W. Murdoch. 1 975a. Functional response and stability in predator-prey systems.
Amer. Natur. 109 : 289-298.
.1975b. Switching, functional response, and stability in predator-prey systems. Amer. Natur.
109 : 299-3 18.
Paine. R. T. 1966. Food web complexity and species diversity. Amer. Natur. 100: 65-75.
.1974. Intertidal community structure. Experimental studies on the relationship between a
dominant competitor and its principal predator. Oecologia 1 5 : 93-120.
Pianka, E. R. 1966. Latitudinal gradients in species diversity: a review of concepts. Amer. Natur.
100: 33-46.
Poole. R. W. 1974. A discrete time stochastic model of a two prey, one predator specirs interaction.
Theoret. Pop. Biol. 5 : 208-228.
Porter. J . W. 1972. Predation by Acanthaster and its effect on coral species diversity. Amer. Natur.
106 : 487-492.
.1974. Community structure of coral reefs on opposite sides of the isthmus of Panama.
Science 186 : 543-545.
Rescigno. A.. and I. W. Richardson. 1965. O n the competitive exclusion priciple. Bull. Math.
Biophys. 27 (special issue): 85-89.
1967. The struggle for life. I. Two species. Bull. Math. Biophys. 2 9 : 377-388.
Rosenzweig, M. L. 1971. Paradox of enrichment: destabilization of exploitation ecosystems in
ecological time. Science 171 : 385-387.
Roughgarden. J. 1974. Species packing and the competition function with illustrations from coral
reef fish. Theoret. Pop. Biol. 5 :163-186.
Roughgarden. J.. and M. Feldman. 1975. Species packing and predation pressure. Ecology
5 6 :489-492.
Schoener. T. W. 1974. Resource partitioning in ecological communities. Science 185: 27-39.
.1976. Alternatives to Lotka-Volterra competition: models of intermediate complexity.
Theoret. Pop. Biol. 1 0 : 309-333.
Sprules. W. G. 1972. Effects of size-selective predation and food competition on high altitude
zooplankton communities. Ecology 53 : 375-386.
Steele. J. H. 1974. The structure of marine ecosystems. Harvard University Press, Cambridge, Mass.
128 pp.
Tanner, J. T. 1975. The stability and the intrinsic growth rates of prey and predator populations.
Ecology 56 : 855-867.
Watt, K . E. F. 1959. A mathematical model for the effect of densities of attacked and attacking
species on the number attacked. Can. Entomol. 91:129-144.
Zaret, T. M. 1972a. Predator-prey interaction in a tropical lacustrine ecosystem. Ecology
53 : 248-257.
.197%. Predators, invisible prey, and the nature of polymorphism in the Cladocera (class
Crustacea). Limnol. Oceanogr. 17 :171-184.