Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
History of electric power transmission wikipedia , lookup
Three-phase electric power wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Electrical ballast wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Stray voltage wikipedia , lookup
Voltage optimisation wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Current source wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Mains electricity wikipedia , lookup
Opto-isolator wikipedia , lookup
Power MOSFET wikipedia , lookup
Alternating current wikipedia , lookup
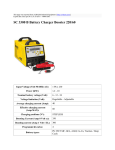
Sinusoidal Battery Charger Team 1613 Faculty Advisor: Dr. Sung Yeul Park Team 1613 Members: Andrew Brooks Peter Darinzo Alec Surprenant Summary The goal of this project is to design a sinusoidal ripple algorithm and charger to more efficiently charge rechargeable lithium-ion batteries by monitoring dynamic battery characteristics. By using a sinusoidal ripple, we can increase charging speed, lower recharging temperature, and extend battery recharge cycles. This charging framework can be extended into applications including power electronics, electric vehicles, and battery backup systems. Background The most prevalent adaptive charging algorithm currently in use is the constant current, constant voltage (CCCV) charging algorithm. This charging mechanism holds a constant current with increasing voltage for the beginning portion of the charging cycle, about 80% charged, and then holds a constant voltage with decreasing current for the remainder of the charging cycle. An example charging profile is shown below. (source: http://www.fveaa.org/forums/index.php?topic=1302.0) This charging mechanism does not account for all of the electrochemical changes that occur in the battery as the battery is charged. Some possible negative effects include, cell overheating, charge capacity loss, overcharging, and lowered recharge cycle life. Statement of Need With the growing popularity of rechargeable battery devices and systems is a growing need for more efficient ways to recharge these batteries. Conventional battery charging algorithms do not consider the time-varying electrochemical properties of these batteries. The ever-changing electrochemical properties make for very complex and computationally demanding algorithms. By utilizing an adaptive algorithm, the potential benefits include increased cycle life, energy savings, faster charging times, and reduced costs. Theory Lithium ion batteries are composed of cells that use intercalation compounds as the electrodes. The cathode is typically a metal oxide with a layered or tunneled structure on an aluminum current collector, while the anode is a structure of graphitic carbon on a copper current collector. During charging, the negative electrode is reduced, and lithium ions are intercalated into the interstitial space. The reverse occurs during discharge, the negative electrode is oxidized, and the ions are de-intercalated, and intercalated into the positive electrode. (Source: http://www.tms.org/pubs/journals/JOM/0809/Fig2.jpg) Standard charging methods such as CCCV do not take the battery’s electrochemical properties into account. This has undesirable effects on the battery, such as lithium plating, the formation of solid electrolyte interphase (SEI), and limited exchange current. Lithium plating occurs when Li+ ions are deposited onto the battery anode faster than they can be intercalated. The result is a loss of capacity, and in extreme cases can lead to a short circuit. SEI is a passivation film formed when solvents react with the electrode surface. SEI spatially separates the electrolyte solvents from the electrode, yet is still ionically conductive and imparts stability into the system. SEI is critical to battery function, however continuous growth causes a loss of capacity and increased internal resistance. The combination of these factors leads to shorter battery life and more losses. (Source: http://pubs.acs.org/doi/abs/10.1021/jp3118055) The batteries resistance is the most important characteristic from an electrical engineering perspective. These phenomena occur during CCCV charging. In addition, a double layer capacitance due to a layer of discrete charges forming on the electrode surface. An equivalent circuit of the battery’s internal impedances can be constructed using resistor for ohmic losses in series with a parallel combination of the charge transfer resistance, and the double layer capacitance. The double layer capacitance is the result of a discrete layer of charge forming on the electrode surface, and the charger transfer resistance limits the faradaic currents from electrochemical reactions between the electrode and the electrolyte. battery equivalent circuit Direct current causes the charging of the double layer capacitance. Once fully charged, the entirety of the applied current flows through the charge transfer resistance. This can be fixed through the application of a sinusoidal ripple current. The time constant of the circuit can be calculated by the product of Cdl and Rct. Since it takes several time constants to charge the double layer capacitance, a ripple current of frequency greater than τ can reduce the effect of double layer charging, and increase the rate of charge transfer. Simple EIS curve (source: http://www.gscsg.com/Electrochemical%20Impedance%20Spectroscopy.html) The effects of frequency on battery impedance can be measured using a technique called electrochemical impedance spectroscopy (EIS) by performing a frequency on the battery. At high frequencies capacitive reactance and charge transfer resistance of the battery’s equivalent circuit are minimized, leaving only the internal ohmic resistance. Therefore, the specific frequency of the charging current ripple can be experimentally determined. The minimization of the battery’s internal impedance results in faster charging, and decreased losses. The application of a sinusoidal charging current can also mitigate the effects of polarization by reducing lithium plating and SEI. Implementing an algorithm to detect optimal ripple current frequency can therefore reduce charging time and improving efficiency, while extending battery life. Solution To provide a background of battery charging technology, a CCCV charger will first be developed. This will serve as the basis for our sinusoidal design. Our charging profile will initially resemble a CCCV charging profile in that initially the current will be constant at the maximum charging current (C/2). There will be constant monitoring of the battery to detect when SEI and lithium plating begin. At this point the optimal frequency is determined and a sinusoidal ripple current is applied by the controller. This monitoring and ripple adjustment will occur until the battery reaches the constant voltage conditions. The basic overall design of the sinusoidal ripple current battery charger is shown in the following block diagram. Power Stage Batteries Vin Iin Vin VBat IBat PWM Ripple Calculator Frequency Calculator Battery Specifications For this project we will work with the Valence Energy Storage Solutions U1-12XP lithium iron magnesium phosphate (LiFeMgPO4) battery. This battery has a nominal voltage of 12.8 V, capacity of 40 Ah, maximum charging voltage of 14.6 V, and recommended charging current of 20A. A picture and full specifications are shown below. Power Stage **ANDREW PLEASE REVIEW THIS SECTION** The buck converters main advantage over the standard buck converter is efficiency when used to power a high current load, and moderate duty cycles. The power loss of a diode switch in the converter can be calculated as the product of its forward voltage, duty cycle, and current. The power dissipated in a nMOSFET of equivalent function is the product of its current squared, its drain-source resistance, and its duty cycle. Taking a typical diode bias voltage of 0.7 V, the diode power loss in a standard buck converter under the parameters of the project would be (0.7 𝑉)(1 − .8)(22 𝐴) = 3.08 𝑊, while the power loss in an equivalent MOSFET, using 16 mΩ as a saturation resistance, would be (22 𝐴)2 (1 − .8)(.016 𝛺) = 1.55 𝑊, nearly a 50% decrease. Increased efficiency can be achieved using a duty cycle closer to 50%, and selecting MOSFETs with a lower saturation resistance. In addition, the synchronous buck can be operated in continuous conduction mode (CCM), while the standard buck is limited to discontinuous conduction mode (DCM). CCM allows the inductor to become negative, or reverse polarity. This is unwanted in most applications, however a negative portion of the ripple current is needed to mitigate the effects of lithium plating and SEI. buck converter synchronous buck (source: http://www.eetimes.com/document.asp?doc_id=1273245) For our application for project, our only restriction to the design of our synchronous buck converter is regulating our voltage output according to the four battery in many multiple formations (series, parallel, or a combination of both). The different combinations will greatly affect the output voltage and the the current flowing through the batteries. This is where the two MOSFETs come into play. MOSFET 1 will be ON at time A, MOSFET 2 will be OFF at time A and constantly turning ON/OFF controlled by a square wave with a certain frequency. Changing this frequency will raise or lower the voltage and the current across the battery load. In order to have the correct component values, consider the maximum conditions of the battery load in both series and parallel configurations. Our battery load constants ask for a maximum voltage of 14.6V with a voltage ripple of about 7% based on the delta voltage out of 2V. The ideal current through each lithium battery is C/2, which is 20A. This means the total current of the four batteries in series is 20A. The voltage across these batteries will 13.6V*4 = 54.4V. In a series configuration the calculated values are shown below. Based on the load requirements, the value of the inductor is 33.75 µH and the capacitor is 4.594 µF. **I know we need to adjust the numbers in here somewhere** In a parallel configuration, the voltage across the configuration is just 13.6 V to keep each of the four batteries at a consistent voltage. The current across the battery configuration should be 20A*4 = 80A. The calculated values of the parallel configuration are shown below. Based on the load requirements, the value of the inductor is 0.8 µH and the capacitor is 91 µF. Taking the maximum value from both cases will allow us to change the configuration of the batteries and have an effective charger. But then resistance across the load, now becomes a problem. As shown above, the resistance values are different between configurations. The easiest solution to this is just sticking with one configuration for our charger. Another, more complex option is to put two resistors in parallel to reach the lower rated resistance of the load. Adding an ON/OFF switch to the higher resistor will allow the current to be cut off from that particular resistor and allowing you to do the series configuration. The power stage will consist of a synchronous buck converter or a DC/DC step down converter connected to the battery. The design will utilize MOSFETs instead of diodes due to their high efficiency with heavy loads and allows for negative currents. The resistance of the load resistor (battery impedance) will be very critical to our application as we want the charging algorithm to change the charging characteristics as the load (battery) impedance changes. The synchronous buck converter, without protection to the battery is shown below. The frequency, V2 is controlled by the PID controller, which controls the switching of the MOSFETs. As shown in below, these circuit is the series configuration, parallel configuration, and a combination of both respectively. The PID controller will take the voltage out and compare the gain with a reduced voltage out and amplify the signal to control the switching of the MOSFETs. **WE NEED AN UPDATED PICTURE WITH THE NEW VALUES** Critical charging parameters, i.e. charging current and battery voltage, will be monitored via closed loop feedback. These feedback signals will be used by a microcontroller and digital signal processing board to modify the operation of the synchronous buck converter during charging by changing the switching frequency to change the current ripple. The final design of the charging stage circuitry will be implemented on a printed circuit board using the program. The main reason why we choose Altium is because Professor Park has a license already and it is a simple, easy to use program to get familiar with. Basic Idea of Altium (Not This Project) **I THINK WE CAN GET RID OF THIS PICTURE SINCE IT IS NOT RELEVANT TO OUR PROJECT** Once a sufficient working knowledge of charging technology and electrochemical theory has been obtained, the project will proceed into the development of a ripple current charging algorithm, and experimental results can be acquired to validate its performance. Controller Here are the transfer functions for the power stage and controller: Plant open loop transfer function: 0.1125 𝑠 + 6.579 × 106 7.81𝑥10−5 𝑠 2 + 0.4655 𝑠 + 6250 Controller transfer function: 5.549 × 102 𝑠 2 + 4.215 × 1019 𝑠 + 8.00523 1.443 × 109 𝑠 3 + 8.118 × 1014 𝑠 2 + 1.142 × 1020 𝑠 Loop transfer function: 6.242 × 1012 𝑠 3 + 3.655 × 1020 𝑠 2 + 2.774 × 1025 𝑠 + 5.266 × 1029 4.44 × 104 𝑠 5 + 2.855 × 1010 𝑠 4 + 5.69 × 1015 𝑠 3 + 3.78 × 1020 𝑠 2 + 1.353 × 1025 𝑠 Plant Bode Plot Plant + Controller Bode Plot The controller will be implemented in dSpace with MATLAB integration. The dSpace controller will handle all of the analog to digital conversions, PWM signal generation, and monitoring of the system. The algorithm will be implemented in MATLAB. By using these systems in conjunction, we are able to quickly adjust values in our algorithm and the time required to implement is reduced. We will continue to explore using the TI DSP at a later time. The primary focus of this device is for testing and verification of the theory. **THE PREVIOUS WAS ADDED. CHANGE AS YOU SEE FIT** Other Design Components For this design we also need to incorporate a protection circuit so that we do not create an unsafe operating environment. This protection circuit will ensure that we operate within the safe ranges for the batteries we are using. Currently, this area of the design have not been designed, however, safety is always included in our design. We also have current and voltage sensors in the lab that need verification with our current design specifications. These current and voltage sensors were purchased previously and we are not sure if they are suitable for our design. Project Plan Timing Fall 2016 Spring 2016 - Develop working knowledge of PCB design software, Altium Research background theory on electrochemistry, electrochemical impedance, and charging methods specific to lithium-ion rechargeable batteries Develop familiarity with microcontroller and its function in digital control systems o Functions including: GPIO, ADC, PWM, and interrupts Implement CCCV charger design Review previous work done by Yong-Duk Lee and others to understand previously developed algorithms Use previously developed algorithms for sinusoidal ripple current charging and integrate additional knowledge from electrochemical research Timeline Task 8 9 2015 10 2016 11 12 1 2 3 Project Statement General Battery Research Li-Ion Research SEI Research Project Proposal Design Review Initial Simulations Parts Ordering Sensor Verification Design Prototype Design Algorthm CCCV Design Testing and Verification Work Organization The primary responsibilities of the team are as follows: ● Andrew Brooks: PCB design, power stage design ● Peter Darinzo: Battery research, algorithm development, power stage design ● Alec Surprenant: Microprocessor (controller) programming, algorithm development The team is also supported by two graduate students: ● ● S M Rakiul Islam Md Kamal Hassain 4 5