Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
OpenStax-CNX module: m14091
1
Motion along curved path
∗
Sunil Kumar Singh
This work is produced by OpenStax-CNX and licensed under the
†
Creative Commons Attribution License 2.0
Abstract
Motion along a curved path can be analyzed in terms of circular motion.
We all experience motion along a curved path in our daily life.
The motion is not exactly a circular
motion. However, we can think of curved path as a sequence of circular motions of dierent radii. As such,
motion of vehicles like that of car, truck etc, on a curved road can be analyzed in terms of the dynamics of
circular motion. Clearly, analysis is done for the circular segment with the smallest radius as it represents
the maximum curvature. It must be noted that "curvature" and "radius of curvature" are inverse to each
other.
Motion along a curved path
Figure 1
One common experience, in this respect, is the experience of a car drive, which is negotiating a sharp
turn. If a person is sitting in the middle of the back seat, she/he holds on the xed prop to keep the posture
steady and move along with the motion of the car. If the person is close to the farther side (from the center
of motion) of the car, then she/he leans to the side of the car to become part of the motion of the car.
In either of the two situations, the requirement of centripetal force for circular motion is fullled. The
bottom of the body is in contact with the car and moves with it, whereas the upper part of the body is not.
∗ Version
1.5: Aug 4, 2007 6:30 am -0500
† http://creativecommons.org/licenses/by/2.0/
http://cnx.org/content/m14091/1.5/
OpenStax-CNX module: m14091
2
When she/he leans on the side of the car away from the center of motion, the side of the car applies normal
force, which meets the requirement of centripetal force. Finally, once the requirement of centripetal force is
met, the complete body is in motion with the car.
Motion along a curved path
Figure 2:
The person presses by side of the car.
The direction in which the body responds to curved motion is easy to nd by just thinking what would be
the natural direction of motion of the free part of the body. In the example discussed above, the body seeks
to move straight, but the lower part in contact with car moves along curved path having side way component
of motion (towards center). The result is that the upper part is away from the center of curvature of the
curved path. In order to keep the body upright an external force in the radial direction is required to be
applied on the body.
1 Negotiating a level curve
Let us concentrate on what is done to turn a car to negotiate a sharp turn. We realize that the driver of a
car simply guides the steering of the car to move it along the turn. Intuitively, we think that the car engine
must be responsible for meeting the requirement of centripetal force. This is right. However, engine does not
directly apply force to meet the requirement of centripetal force. It is actually the friction, resulting from
the motion caused by engine, which acts towards the center of circular path and meets the requirement of
centripetal force.
The body of the car tends to move straight in accordance with its natural tendency? Now, as wheel is
made to move side way (by the change in direction), the wheel has the tendency to have relative motion
with respect to the road in the direction away from the center of path. In turn, road applies friction, which
is directed towards the center.
http://cnx.org/content/m14091/1.5/
OpenStax-CNX module: m14091
3
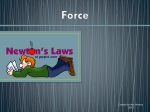
Negotiating a level curve
Figure 3:
The friction meets the requirement of centripetal force.
Important to note here is that we are not considering friction in the forward or actual direction of motion,
but perpendicular to actual direction (side way). There is no motion in the side way direction, if there is no
side way skidding of the car. In that case, the friction is static friction (
or limiting friction (
Fs
fs
) and has not exceeded maximum
). Thus,
fs ≤ Fs
⇒ fs ≤ µs N
There is no motion in vertical direction. Hence,
N = mg
Combining two equations, we have :
⇒ fs ≤ µs mg
where m is the combined mass of the car and the passengers.
In the limiting situation, when the car is about to skid away, the friction force is equal to the maximum
static friction, meeting the requirement of centripetal force required for circular motion,
⇒
mv 2
r
= µs mg
√
⇒ v =
( µs rg )
We note following points about the condition as put on the speed of the car :
http://cnx.org/content/m14091/1.5/
OpenStax-CNX module: m14091
•
4
There is a limiting or maximum speed of car to ensure that the car moves along curved path without
skidding.
•
If the limiting condition with regard to velocity is not met (
v ≤
√
( µs rg ) ),
then the car will skid
away.
•
•
The limiting condition is independent of the mass of the car.
If friction between tires and the road is more, then we can negotiate a curved path with higher speed
and vice-versa. This explains why we drive slow on slippery road.
•
Smaller the radius of curvature, smaller is the limiting speed. This explains why sharper turn (smaller
radius of curvature) is negotiated with smaller speed.
2 Banking of roads
There are three additional aspects of negotiating a curve. First, what if, we want to negotiate curve at a
higher speed. Second, how to make driving safer without attracting limiting conditions as tires may have
been attened (whose grooves have attened), or friction may decrease due to any other reasons like rain or
mud. Third, we want to avoid sideway friction to prolong life of the tires. The answer to these lie in banking
of the curved road.
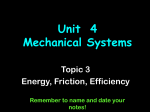
For banking, one side of the road is elevated from horizontal like an incline or wedge. In this case, the
component of normal force in horizontal direction provides the centripetal force as required for the motion
along the curved path.
On the other hand, component of normal force in vertical direction balances the
weight of the vehicle. It is clear that magnitude of normal reaction between road and vehicle is greater than
the weight of the vehicle.
Banking of roads
Figure 4:
The horizontal component of normal force meets the requirement of centripetal force.
http://cnx.org/content/m14091/1.5/
OpenStax-CNX module: m14091
5
Here, we compute the relation between the angle of banking (which is equal to the angle of incline) for
a given speed and radius of curvature as :
N cosθ = mg
and
mv 2
r
N sinθ =
Taking ratio,
2
⇒ tanθ = vrg
√
⇒ v =
( rgtanθ )
This expression represents the speed at which the vehicle does not skid (up or down) along the banked
road for the given angle of inclination (θ ). It means that centripetal force is equal to the resultant of the
system of forces acting on the vehicle. Importantly, there is no friction involved in this consideration for the
circular motion of the vehicle.
Example 1
Problem :
An aircraft hovers over a city awaiting clearnace to land. The aricraft circles with
its wings banked at an angle
Solution :
tan − 1 ( 0.2 )
at a speed of 200 m/s. Find the radius of the loop.
The aircraft is banked at an angle with horizontal.
Since aircraft is executing
uniform circular motion, a net force on the aircraft should act normal to its body. The component
of this normal force in the radial direction meets the requirement of centripetal force, whereas
vertical component balances the weight of aircraft. Thus, this situation is analogous to the banking
of road.
⇒ tanθ =
⇒ r =
⇒ r =
2002
10 x 0.2
v2
rg
v2
gtanθ
= 20000 m
3 Role of friction in banking
The moot question is whether banking of road achieves the objectives of banking? Can we negotiate the
curve with higher speed than when the road is not banked? In fact, the expression of speed as derived in
earlier section gives the angle of banking for a particular speed. It is the speed for which the component of
normal towards the center of circle matches the requirement of centripetal force.
If speed is less than that specied by the expression, then vehicle will skid "down" (slip or slide) across
the incline as there is net force along the incline of the bank. This reduces the radius of curvature i.e. "r"
is reduced - such that the relation of banking is held true :
⇒ v =
http://cnx.org/content/m14091/1.5/
√
( rgtanθ )
OpenStax-CNX module: m14091
6
Banking of road
Figure 5:
The vehicle has tendency to skid down.
In reality, however, the interacting surfaces are not smooth.
We can see that if friction, acting "up"
across the bank, is sucient to hold the vehicle from sliding down, then vehicle will move along the circular
path without skidding "down".
What would happen if the vehicle exceeds the specied speed for a given angle of banking? Clearly, the
requirement of centripetal force exceeds the component of normal force in the radial direction. As such the
vehicle will have tendency to skid "up" across the bank.
Again friction prevents skidding "up" of the vehicle across the bank. This time, however, the friction
acts downward across the bank as shown in the gure.
Banking of road
Figure 6:
The vehicle has tendency to skid up.
In the nutshell, we see that banking helps to prevent skidding "up" across the bank due to the requirement
of centripetal force. The banking enables component of normal force in the horizontal direction to provide for
the requirement of centripetal force up to a certain limiting (maximum) speed. Simultaneously, the banking
induces a tendency for the vehicle to skid "down" across the bank.
On the other hand, friction prevents skidding "down" as well as skidding "up" across the bank. This is
possible as friction changes direction opposite to the tendency of skidding either "up" or "down" across the
bank. The state of friction is summarized here :
1:
2:
3:
v=√
0; fS = mgsinθ,
v = √rgtanθ; fS = 0
v < rgtanθ; fS > 0,
http://cnx.org/content/m14091/1.5/
acting up across the bank
acting up across the bank
OpenStax-CNX module: m14091
4:
v>
√
rgtanθ;
fS > 0,
7
acting down across the bank
Friction, therefore, changes its direction depending upon whether the vehicle has tendency to skid "down"
or "up" across the bank. Starting from zero speed, we can characterize friction in following segments (i)
friction is equal to the component of weight along the bank,"
√
mgsinθ
", when vehicle is stationary (ii)
friction decreases as the speed increases (iii) friction becomes zero as speed equals "
changes direction as speed becomes greater than "
√
rgtanθ
√
rgtanθ
" (iv) friction
" (v) friction increases till the friction is equal to
limiting friction as speed further increases and (vi) friction becomes equal to kinetic friction when skidding
takes place.
3.1 Skidding down the bank
In this case, the velocity of the vehicle is less than threshold speed "
√
rgtanθ
". Friction acts "up" across
the bank. There are three forces acting on the vehicle (i) its weight "mg" (ii) normal force (N) due to the
bank surface and (iii) static friction "
fs
", acting up the bank. The free body diagram is as shown here.
Banking of road
Figure 7:
The speed is less than the threshold speed.
X
Fx ⇒ N sinθ − fS cosθ =
X
http://cnx.org/content/m14091/1.5/
mv 2
r
Fy ⇒ N cosθ + fS sinθ = mg
OpenStax-CNX module: m14091
8
3.2 Skidding up the bank
In this case, the velocity of the vehicle is greater than threshold speed. Friction acts "down" across the bank.
There are three forces acting on the vehicle (i) its weight "mg" (ii) normal force (N) due to the bank surface
and (iii) static friction "
fs
", acting down the bank. The free body diagram is as shown here.
Banking of road
Figure 8:
The speed is greater than the threshold speed.
X
Fx ⇒ N sinθ + fS cosθ =
X
mv 2
r
Fy ⇒ N cosθ − fS sinθ = mg
4 Maximum speed along the banked road
In previous section, we discussed various aspects of banking. In this section, we seek to nd the maximum
speed with which a banked curve can be negotiated. We have seen that banking, while preventing upward
skidding, creates situation in which the vehicle can skid downward at lower speed.
The design of bank, therefore, needs to consider both these aspects.
a small angle of inclination only.
Actually, roads are banked with
It is important as greater angle will induce tendency for the vehicle to
overturn. For small inclination of the bank, the tendency of the vehicle to slide down is ruled out as friction
between tyres and road is usually much greater to prevent downward skidding across the road.
In practice, it is the skidding "up" across the road that is the prime concern as threshold speed limit can
be breached easily. The banking supplements the provision of centripetal force, which is otherwise provided
http://cnx.org/content/m14091/1.5/
OpenStax-CNX module: m14091
9
by the friction on a at road. As such, banking can be seen as a mechanism either (i) to increase the threshold
speed limit or (ii) as a safety mechanism to cover the risk involved due to any eventuality like attening of
tyres or wet roads etc. In fact, it is the latter concern that prevails.
In the following paragraph, we set out to determine the maximum speed with which a banked road can
be negotiated. It is obvious that maximum speed corresponds to limiting friction that acts in the downward
direction as shown in the gure.
Banking of roads
Figure 9:
The horizontal component of normal force and friction together meet the requirement of
centripetal force.
Force analysis in the vertical direction :
N cosθ − µs N sinθ = mg
⇒ N ( cosθ − µs sinθ ) = mg
Force analysis in the horizontal direction :
N sinθ + µs N cosθ =
mv 2
r
⇒ N ( sinθ + µs cosθ ) =
Taking ratio of two equations, we have :
http://cnx.org/content/m14091/1.5/
mv 2
r
OpenStax-CNX module: m14091
10
⇒
⇒
⇒
2
g ( sinθ + µs cosθ )
= vr
( cosθ − µs sinθ )
sinθ + µs cosθ )
v 2 = rg (( cosθ
− µs sinθ )
√
( tanθ + µs )
v =
{ rg ( 1 − µs tanθ )
}
5 Bending by a cyclist
We have seen that a cyclist bends towards the center in order to move along a circular path. Like in the case
of car, he could have depended on the friction between tires and the road. But then he would be limited by
the speed. Further, friction may not be sucient as contact surface is small. We can also see "bending" of
cyclist at greater speed as an alternative to banking used for four wheeled vehicles, which can not be bent.
The cyclist increases speed without skidding by leaning towards the center of circular path.
The sole
objective of bending here is to change the direction and magnitude of normal force such that horizontal
component of the normal force provides for the centripetal force, whereas vertical component balances the
"cycle and cyclist" body system.
Banking of roads
Figure 10:
The horizontal component of normal force meets the requirement of centripetal force.
N cosθ = mg
N sinθ =
http://cnx.org/content/m14091/1.5/
mv 2
r
OpenStax-CNX module: m14091
11
Taking ratio,
2
⇒ tanθ = vrg
√
⇒ v =
( rgtanθ )
http://cnx.org/content/m14091/1.5/