Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Radar Systems Engineering
Lecture 6
Detection of Signals in Noise
Dr. Robert M. O’Donnell
IEEE New Hampshire Section
Guest Lecturer
IEEE New Hampshire Section
Radar Systems Course 1
Detection 1/1/2010
IEEE AES Society
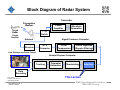
Block Diagram of Radar System
Transmitter
Propagation
Medium
Target
Radar
Cross
Section
Power
Amplifier
Waveform
Generation
T/R
Switch
Antenna
Receiver
Signal Processor Computer
A/D
Converter
Pulse
Compression
Clutter Rejection
(Doppler Filtering)
User Displays and Radar Control
General Purpose Computer
Tracking
Parameter
Estimation
Thresholding
Detection
Data
Recording
This Lecture
Photo Image
Courtesy of US Air Force
Used with permission.
Radar Systems Course
Detection 11/1/2010
2
IEEE New Hampshire Section
IEEE AES Society
Outline
•
Basic concepts
– Probabilities of detection and false alarm
– Signal-to-noise ratio
Radar Systems Course
Detection 11/1/2010
3
•
Integration of pulses
•
Fluctuating targets
•
Constant false alarm rate (CFAR) thresholding
•
Summary
IEEE New Hampshire Section
IEEE AES Society
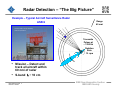
Radar Detection – “The Big Picture”
Example – Typical Aircraft Surveillance Radar
ASR-9
Range
60 nmi.
Courtesy of MIT Lincoln Laboratory
Used with permission
Transmits
Pulses at
~ 1250 Hz
Rotation
Rate
12. rpm
•
•
Mission – Detect and
track all aircraft within
60 nmi of radar
S-band λ ~ 10 cm
Radar Systems Course
Detection 11/1/2010
4
IEEE New Hampshire Section
IEEE AES Society
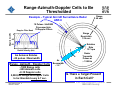
Range-Azimuth-Doppler Cells to Be
Thresholded
Range
60 nmi.
Example – Typical Aircraft Surveillance Radar
ASR-9
Magnitude (dB)
10 Pulses / Half BW
Processed into
10 Doppler Filters
Doppler Filter Bank
Range
Resolution
1/16 nmi
0
-25
-50
0
Rotation
Rate
12.7 rpm
50
100
Radial Velocity (kts)
As Antenna Rotates
~22 pulses / Beamwidth
Range - Azimuth - Doppler Cells
~1000 Range cells
~500 Azimuth cells
~8-10 Doppler cells
5,000,000 Range-Az-Doppler Cells
to be threshold every 4.7 sec.
Radar Systems Course
Detection 11/1/2010
5
Az
Beamwidth
~1.2 °
Radar
Transmits
Pulses at
~ 1250 Hz
Is There a Target Present
in Each Cell?
IEEE New Hampshire Section
IEEE AES Society
Received Backscatter Power (dB)
Target Detection in Noise
•
•
•
•
40
30
False
Alarm
Detected
Strong
Target
20
Threshold
Weak target (not detected)
Noise
10
0
0
25
50
100
Range (nmi.)
125
150
175
Received background noise fluctuates randomly up and down
The target echo also fluctuates…. Both are random variables!
To decide if a target is present, at a given range, we need to set a
threshold (constant or variable)
Detection performance (Probability of Detection) depends of the
strength of the target relative to that of the noise and the threshold
setting
Signal-To Noise Ratio and Probability of False Alarm
–
Radar Systems Course
Detection 11/1/2010
6
IEEE New Hampshire Section
IEEE AES Society
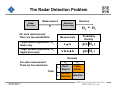
The Radar Detection Problem
Radar
Receiver
Measurement
x
For each measurement
There are two possibilities:
H0
or
H1
Measurement
Probability
Density
Target absent hypothesis, H 0
Noise only
x=n
p( x H 0 )
Target present hypothesis, H 1
Signal plus noise
x = a+n
p( x H 1 )
Decision
H0
H1
For each measurement
There are four decisions:
H0
Truth
H1
Radar Systems Course
Detection 11/1/2010
Decision
Detection
Processing
7
Don’t
Report
False
Alarm
Missed
Detection
Detection
IEEE New Hampshire Section
IEEE AES Society
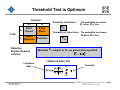
Threshold Test is Optimum
Decision
H0
Truth
H0
H1
Don’t
Report
False
Alarm
Missed
Probability of Detection:
PD
H1 Detection Detection
Objective:
Neyman-Pearson
criterion
Likelihood
Ratio
The probability we choose
H1 when H1 is true
Probability of False Alarm: The probability we choose
H1 when H 0 is true
PFA
Maximize PD subject to PFA no greater than specified
(PFA ≤ α )
Likelihood Ratio Test
p( x H 1 )
L( x ) =
p( x H 0 )
Threshold
H1
>
<H
η
0
Radar Systems Course
Detection 11/1/2010
8
IEEE New Hampshire Section
IEEE AES Society
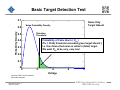
Basic Target Detection Test
0.7
Noise Probability Density
0.6
Probability Density
Noise Only
Target Absent
Detection
Threshold
0.5
Probability
)
Probability of
of False
False Alarm
Alarm (( P
PFA
FA )
P
= Prob{ threshold exceeded given target absent }
PFA
FA = Prob{ threshold exceeded given target absent }
i.e.
i.e. the
the chance
chance that
that noise
noise is
is called
called aa (false)
(false) target
target
We
to be very, very low!
We want
want P
PFA
FA to be very, very low!
0.4
0.3
0.2
0.1
0
0
2
4
Voltage
6
8
Courtesy of MIT Lincoln Laboratory
Used with permission
Radar Systems Course
Detection 11/1/2010
9
IEEE New Hampshire Section
IEEE AES Society
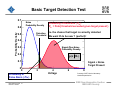
Basic Target Detection Test
0.7
Noise
Probability Density
Probability Density
0.6
Detection
Threshold
0.5
Probability
Probability of
of Detection
Detection (( P
PDD ))
P
PDD == Prob{
Prob{ threshold
threshold exceeded
exceeded given
given target
target present
present }}
I.e.
I.e. the
the chance
chance that
that target
target is
is correctly
correctly detected
detected
We
to be
be near
near 11 (perfect)!
(perfect)!
We want
want P
PDD to
0.4
Signal-Plus-Noise
Probability Density
0.3
0.2
p( x H 1 )
0.1
0
0
Probability
Probability of
of
False
Alarm
)
False Alarm (( P
PFA
FA )
Radar Systems Course
Detection 11/1/2010
10
Signal + Noise
Target Present
2
4
Voltage
6
8
Courtesy of MIT Lincoln Laboratory
Used with permission
IEEE New Hampshire Section
IEEE AES Society
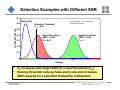
Detection Examples with Different SNR
0.7
Probability Density
0.6
Noise Only
Courtesy of MIT Lincoln Laboratory
Used with permission
Detection Threshold
PFA = 0.01
0.5
0.4
Signal Plus Noise
SNR = 10 dB
PD = 0.61
0.3
Signal Plus Noise
SNR = 20 dB
PD ~ 1
0.2
0.1
0
0
5
10
15
Voltage
•
•
PDD increases with target SNR for a fixed threshold (PFA
)
FA
Raising threshold reduces false alarm rate and increases
SNR required for a specified Probability of Detection
Radar Systems Course
Detection 11/1/2010
11
IEEE New Hampshire Section
IEEE AES Society
Probability
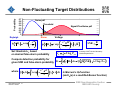
Non-Fluctuating Target Distributions
Rayleigh
0.7
0.6
0.5
0.4
0.3
0.2
0.1
00
Noise pdf
Threshold
2
Rician
⎛ r2 ⎞
p ( r H o ) = r exp ⎜⎜ − ⎟⎟
⎝ 2⎠
Signal-Plus-Noise pdf
4
6
Voltage
(
⎛ r2 + R ⎞
⎟⎟ I o r R
p ( r H 1 ) = r exp ⎜⎜ −
2 ⎠
⎝
Set threshold rT based
on desired false-alarm probability
rT = − 2 log e PFA
∞
)
8
SNR =
R
2
Courtesy of MIT Lincoln Laboratory
Used with permission
Compute detection probability for
P = p ( r H 1 ) dr = Q
given SNR and false-alarm probability D ∫
(
2 ( SNR ), − 2 log e PFA
)
rT
∞
2
2
⎞
⎛
r
a
+
where Q ( a, b ) = r exp ⎜ −
⎟⎟ I o ( a r ) dr
∫b
⎜
2 ⎠
⎝
Radar Systems Course
Detection 11/1/2010
12
Is Marcum’s Q-Function
(and I0(x) is a modified Bessel function)
IEEE New Hampshire Section
IEEE AES Society
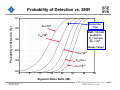
Probability of Detection vs. SNR
Probability of Detection (PD)
1.0
Remember
This!
PFA=10-4
0.8
SNR = 13.2 dB
needed for
PD = 0.9 and
PFA = 10-6
PFA=10-6
0.6
Steady Target
0.4
PFA=10-8
0.2
PFA=10-10
PFA=10-12
0.0
4
6
8
10
12
14
16
18
Signal-to-Noise Ratio (dB)
Radar Systems Course
Detection 11/1/2010
13
IEEE New Hampshire Section
IEEE AES Society
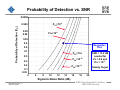
Probability of Detection vs. SNR
0.9999
Probability of Detection (PD)
0.999
PFA=10-4
0.99
0.98
PFA=10-6
0.95
0.9
Remember
This!
0.8
0.7
0.5
PFA=10-10
0.3
0.2
0.1
0.05
4
PFA=10-12
6
8
10
12
14
Signal-to-Noise Ratio (dB)
Radar Systems Course
Detection 11/1/2010
14
SNR = 13.2 dB
needed for
PD = 0.9 and
PFA = 10-6
PFA=10-8
16
18
Steady Target
20
IEEE New Hampshire Section
IEEE AES Society
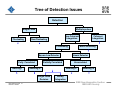
Tree of Detection Issues
Detection
Multiple pulses
Single Pulse
Fluctuating
Non-Coherent
Integration
Non-Fluctuating
Fluctuating
Square Law Detector
Fully Correlated
Swerling I
Partially Correlated
Swerling III
Single Pulse
Decision
Radar Systems Course
Detection 11/1/2010
15
Coherent
Integration
Non-Fluctuating
Linear Detector
Uncorrelated
Swerling II
Swerling IV
Binary
Integration
IEEE New Hampshire Section
IEEE AES Society
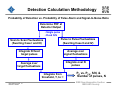
Detection Calculation Methodology
Probability of Detection vs. Probability of False Alarm and Signal-to-Noise Ratio
Determine PDF at
Detector Output
• Single pulse
• Fixed S/N
Scan to Scan Fluctuations
(Swerling Case I and III)
Pulse to Pulse Fluctuations
(Swerling Case II and IV)
Integrate N fixed
target pulses
Average over
signal fluctuations
Average over
target fluctuations
Integrate over N
pulses
Integrate from
threshold, T, to ∞
Radar Systems Course
Detection 11/1/2010
16
PD vs. PFA, S/N, &
Number of pulses, N
IEEE New Hampshire Section
IEEE AES Society
Outline
Radar Systems Course
Detection 11/1/2010
17
•
Basic concepts
•
Integration of pulses
•
Fluctuating targets
•
Constant false alarm rate (CFAR) thresholding
•
Summary
IEEE New Hampshire Section
IEEE AES Society
Integration of Radar Pulses
Coherent Integration
Pulses
x1
x2
Sum
…
xn
Calculate
2
N
n =1
Threshold
n
xN
Target Detection
Declared if
•
•
•
•
1
N
n =1
Calculate
x2
Calculate
xN
2
N
∑x
x1
…
∑x
n
Noncoherent Integration
Pulses
>T
Adds ‘voltages’ , then square
Phase is preserved
pulse-to-pulse phase coherence required
SNR Improvement = 10 log10 N
x12
x
Calculate
N
∑x
2
2
Calculate
n =1
Threshold
2
n
x 2N
Target Detection
Declared if
1 N 2
xn > T
∑
N n =1
• Adds ‘powers’ not voltages
• Phase neither preserved nor required
• Easier to implement, not as efficient
Detection performance can be improved by integrating
multiple pulses
Radar Systems Course
Detection 11/1/2010
18
IEEE New Hampshire Section
IEEE AES Society
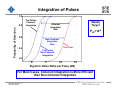
Integration of Pulses
1.0
Probability of Detection
0.8
0.6
0.4
Ten Pulses
Coherent
Integration
Steady
Target
Coherent
Integration
Gain
PFA=10-6
Non-Coherent
Integration
Gain
One Pulse
Ten Pulses
Non-Coherent
Integration
0.2
0
5
10
15
Signal to Noise Ratio per Pulse (dB)
For Most Cases, Coherent Integration is More Efficient
than Non-Coherent Integration
Radar Systems Course
Detection 11/1/2010
19
IEEE New Hampshire Section
IEEE AES Society
Different Types of Non-Coherent Integration
•
•
Non-Coherent Integration – Also called (“video integration”)
–
Generate magnitude for each of N pulses
–
Add magnitudes and then threshold
Binary Integration (M-of-N Detection)
–
Separately threshold each pulse
1 if signal > threshold; 0 otherwise
–
Count number of threshold crossings (the # of 1s)
–
Threshold this sum of threshold crossings
Simpler to implement than coherent and non-coherent
•
Cumulative Detection (1-of-N Detection)
Radar Systems Course
Detection 11/1/2010
–
Similar to Binary Integration
–
Require at least 1 threshold crossing for N pulses
20
IEEE New Hampshire Section
IEEE AES Society
Binary (M-of-N) Integration
Pulse 1
Threshold
T
Calculate
x1
x12
Pulse 2
Calculate
x2
x
Threshold
T
2
2
i1
i2
m = ∑ in
n =1
Threshold
T
Calculate
xN
2nd Threshold
M
N
…
Pulse N
Calculate
Sum
x 2N
iN
Individual pulse detectors:
2
x n ≥ T, i n = 1
2
x n < T, i n = 0
2nd thresholding:
m ≥ M , target present
m < M , target absent
Target present if at least M detections in N pulses
Binary Integration
At Least
M of N
Detections
Radar Systems Course
Detection 11/1/2010
21
PM / N =
N
∑
k =M
N!
N −k
pk ( 1 − p)
k ! (N − k ) !
Cumulative Detection
At Least
1 of N
PC = 1 − ( 1 − p )
N
IEEE New Hampshire Section
IEEE AES Society
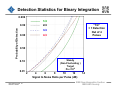
Detection Statistics for Binary Integration
0.999
1/4
Probability of Detection
0.99
“1/4”
= 1 Detection
Out of 4
Pulses
2/4
3/4
4/4
0.90
0.50
Steady
(Non-Fluctuating )
Target
PFA=10-6
0.10
0.01
Radar Systems Course
Detection 11/1/2010
22
2
4
6
8
10
12
Signal to Noise Ratio per Pulse (dB)
14
IEEE New Hampshire Section
IEEE AES Society
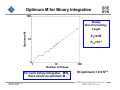
Optimum M for Binary Integration
100
Optimum M
Steady
(Non-Fluctuating )
Target
PD=0.95
10
1
PFA=10-6
1
10
Number of Pulses
For each binary Integrator, M/N,
there exists an optimum M
Radar Systems Course
Detection 11/1/2010
23
100
M (optimum) ≈ 0.9 N0.8
IEEE New Hampshire Section
IEEE AES Society
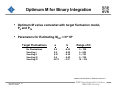
Optimum M for Binary Integration
•
Optimum M varies somewhat with target fluctuation model,
PD and PFA
•
Parameters for Estimating MOPT = Na 10b
Target Fluctuations
No Fluctuations
Swerling I
Swerling II
Swerling III
Swerling IV
a
0.8
0.8
0.91
0.8
0.873
b
- 0.02
- 0.02
- 0.38
- 0.02
- 0.27
Range of N
5 – 700
6 – 500
9 – 700
6 – 700
10 – 700
Adapted from Shnidman in Richards, reference 7
Radar Systems Course
Detection 11/1/2010
24
IEEE New Hampshire Section
IEEE AES Society
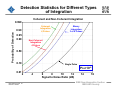
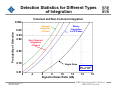
Detection Statistics for Different Types
of Integration
Coherent and Non-Coherent Integration
0.999
Coherent
Integration
4 Pulses
Probability of Detection
0.99
0.95
0.90
Binary
Integration
3 of 4 Pulses
Non-Coherent
Integration
4 Pulses
0.50
0.10
Single Pulse
PFA=10-6
0.01
Radar Systems Course
Detection 11/1/2010
2
25
4
6
8
10
12
Signal to Noise Ratio (dB)
14
16
IEEE New Hampshire Section
IEEE AES Society
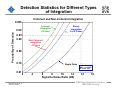
Detection Statistics for Different Types
of Integration
Coherent and Non-Coherent Integration
0.999
Coherent
Integration
4 Pulses
Probability of Detection
0.99
0.95
0.90
Binary
Integration
3 of 4 Pulses
Non-Coherent
Integration
4 Pulses
0.50
0.10
Single Pulse
PFA=10-6
0.01
Radar Systems Course
Detection 11/1/2010
2
26
4
6
8
10
12
Signal to Noise Ratio (dB)
14
16
IEEE New Hampshire Section
IEEE AES Society
Detection Statistics for Different Types
of Integration
Coherent and Non-Coherent Integration
0.999
Coherent
Integration
4 Pulses
Probability of Detection
0.99
0.95
0.90
Binary
Integration
3 of 4 Pulses
Non-Coherent
Integration
4 Pulses
0.50
0.10
Single Pulse
PFA=10-6
0.01
Radar Systems Course
Detection 11/1/2010
2
27
4
6
8
10
12
Signal to Noise Ratio (dB)
14
16
IEEE New Hampshire Section
IEEE AES Society
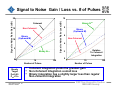
Signal to Noise Gain / Loss vs. # of Pulses
10
Signal to Noise Ratio Loss (dB)
Signal to Noise Ratio Gain (dB)
20
Coherent
Non-Coherent
15
Binary
(Optimum M)
10
5
Binary N1/2
0
1
10
Number of Pulses
•
•
•
Steady
Target
PD=0.95
PFA=10-6
Radar Systems Course
Detection 11/1/2010
28
100
Binary N1/2
8
Binary
(Optimum M)
6
Non-Coherent
4
Relative
To Coherent
Integration
2
0
1
10
Number of Pulses
100
Coherent Integration yields the greatest gain
Non-Coherent Integration a small loss
Binary integration has a slightly larger loss than regular
Non-coherent integration
IEEE New Hampshire Section
IEEE AES Society
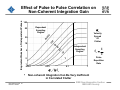
100
29
σv
Velocity
Spread
Of
Clutter
=3
00
20
10
0
50
10
Independent
Sampling
Region
30
10
20
5
1
fr =
T
Pulse
Repetition
Rate
3
2
1
0.001
0.01
0.1
1
σ v / λ fr
•
Radar Systems Course
Detection 11/1/2010
Dependent
Sampling
Region
50
N
Equivalent Number of Independent Pulses
Effect of Pulse to Pulse Correlation on
Non-Coherent Integration Gain
Non-coherent Integration Can Be Very Inefficient
in Correlated Clutter
IEEE New Hampshire Section
IEEE AES Society
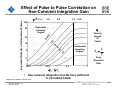
Effect of Pulse to Pulse Correlation on
Non-Coherent Integration Gain
.99
0.9
0.1
0.02
100
20
Dependent
Sampling
Region
σv
Velocity
Spread
Of
Clutter
=3
00
50
50
10
10
0
N
Independent
Sampling
Region
30
5
10
20
Equivalent Number of Independent Pulses
ρ (T)
Pulse
Repetition
Rate
3
2
1
0.001
1
fr =
T
0.01
0.1
1
σ v / λ fr
•
Non-coherent Integration Can Be Very Inefficient
in Correlated Clutter
Adapted from nathanson, Reference 8
Radar Systems Course
Detection 11/1/2010
30
IEEE New Hampshire Section
IEEE AES Society
Albersheim Empirical Formula for SNR
(Steady Target - Good Method for Approximate Calculations)
•
Single pulse: SNR (natural units ) = A + 0.12 A B + 1.7 B
⎛ 0.62 ⎞
⎟⎟
A = log e ⎜⎜
⎝ PFA ⎠
– Where:
⎛ PD ⎞
⎟⎟
B = log e ⎜⎜
⎝ 1 − PD ⎠
– Less than .2 dB error for:
10 −3 > PFA > 10 −7
0.9 > PD > 0.1
– Target assumed to be non-fluctuating
•
For n independent integrated samples:
4.54 ⎞
⎛
⎟ log 10 (A + 0.12 A B + 1.7 B )
SNR n (dB ) = −5 log 10 n + ⎜ 6.2 +
n + 0.44 ⎠
⎝
SNR
Per
Sample
– Less than .2 dB error for:
8096 > n > 1
10 −3 > PFA > 10 −7
0.9 > PD > 0.1
– For more details, see References 1 or 5
Radar Systems Course
Detection 11/1/2010
31
IEEE New Hampshire Section
IEEE AES Society
Outline
Radar Systems Course
Detection 11/1/2010
32
•
Basic concepts
•
Integration of pulses
•
Fluctuating targets
•
Constant false alarm rate (CFAR) thresholding
•
Summary
IEEE New Hampshire Section
IEEE AES Society
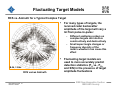
Fluctuating Target Models
RCS vs. Azimuth for a Typical Complex Target
•
For many types of targets, the
received radar backscatter
amplitude of the target will vary a
lot from pulse-to-pulse:
–
–
•
B-26, 3 GHz
RCS versus Azimuth
Radar Systems Course
Detection 11/1/2010
33
Different scattering centers on
complex targets can interfere
constructively and destructively
Small aspect angle changes or
frequency diversity of the
radar’s waveform can cause this
effect
Fluctuating target models are
used to more accurately predict
detection statistics (PD vs., PFA,
and S/N) in the presence of target
amplitude fluctuations
IEEE New Hampshire Section
IEEE AES Society
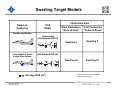
Swerling Target Models
Nature of
Scattering
Similar amplitudes
RCS
Model
Radar Systems Course
Detection 11/1/2010
34
Fast Fluctuation
“Pulse-to-Pulse”
Swerling I
Swerling II
Swerling III
Swerling IV
(Chi-Squared DOF=4)
4σ
⎛ 2σ⎞
p (σ ) = 2 exp⎜ −
⎟
σ
⎝ σ ⎠
σ=
Slow Fluctuation
“Scan-to-Scan”
Exponential
(Chi-Squared DOF=2)
1
⎛ σ⎞
p(σ ) = exp⎜ − ⎟
σ
⎝ σ⎠
One scatterer much
Larger than others
Fluctuation Rate
Average RCS (m2)
Courtesy of MIT Lincoln Laboratory
Used with permission
IEEE New Hampshire Section
IEEE AES Society
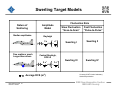
Swerling Target Models
Nature of
Scattering
Amplitude
Model
Similar amplitudes
Rayleigh
⎛ a2 ⎞
2a
p(a ) =
exp⎜⎜ − ⎟⎟
σ
⎝ σ⎠
One scatterer much
Larger than others
⎛ 2 a2 ⎞
8a
⎟⎟
p (a ) = 2 exp⎜⎜ −
σ
σ
⎝
⎠
Radar Systems Course
Detection 11/1/2010
35
Slow Fluctuation
“Scan-to-Scan”
Average RCS (m2)
Fast Fluctuation
“Pulse-to-Pulse”
Swerling I
Swerling II
Swerling III
Swerling IV
Central Rayleigh,
DOF=4
3
σ=
Fluctuation Rate
Courtesy of MIT Lincoln Laboratory
Used with permission
IEEE New Hampshire Section
IEEE AES Society
Other Fluctuation Models
•
Detection Statistics Calculations
–
–
–
–
–
–
•
Steady and Swerling 1,2,3,4 Targets in Gaussian Noise
Chi- Square Targets in Gaussian Noise
Log Normal Targets in Gaussian Noise
Steady Targets in Log Normal Noise
Log Normal Targets in Log Normal Noise
Weibel Targets in Gaussian Noise
Chi Square, Log Normal and Weibel Distributions have
long tails
– One more parameter to specify distribution
Mean to median ratio for log normal distribution
•
When used
–
–
–
–
–
Radar Systems Course
Detection 11/1/2010
36
Ground clutter
Sea Clutter
HF noise
Birds
Rotating Cylinder
Weibel
Log Normal
Log Normal
Log Normal
Log Normal
IEEE New Hampshire Section
IEEE AES Society
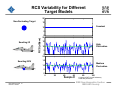
RCS Variability for Different
Target Models
20
Non-fluctuating Target
15
Constant
10
Swerling I/II
RCS (dBsm)
5
0
20
15
High
Fluctuation
10
5
0
20
Swerling III/IV
15
Medium
Fluctuation
10
5
0
0
20
40
60
Sample #
Radar Systems Course
Detection 11/1/2010
37
80
100
Courtesy of MIT Lincoln Laboratory
Used with permission
IEEE New Hampshire Section
IEEE AES Society
Fluctuating Target Single Pulse
Detection : Rayleigh Amplitude
H 1 : x = ae jφ + n
H0 : x = n
Detection Test
Rayleigh
amplitude
model
z= x >T
H1
x <T
H0
Probability of
⎛ T2
False Alarm
PFA = exp⎜⎜ − 2
(same as for
⎝ σN
non-fluctuating)
Probability of
Detection Test
Radar Systems Course
Detection 11/1/2010
38
Average
SNR per
pulse
σ
ξ= 2
σN
⎞
⎟⎟
⎠
PD = ∫ p ( z > T H 1 , a) p(a) da dz
⎛ T2
PD = exp⎜⎜ − 2
⎝ σN
⎛ a2 ⎞
2a
p(a ) =
exp⎜⎜ − ⎟⎟
σ
⎝ σ⎠
⎛ 1 ⎞
⎜⎜
⎟⎟
1
+
ξ
⎠
FA ⎝
PD = P
⎛ 1 ⎞⎞
⎜⎜
⎟⎟ ⎟⎟
⎝ 1+ ξ ⎠⎠
IEEE New Hampshire Section
IEEE AES Society
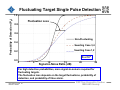
Fluctuating Target Single Pulse Detection
Probability of Detection (PD)
1.0
Fluctuation Loss
0.8
0.6
Non-Fluctuating
0.4
Swerling Case 3,4
Swerling Case 1,2
0.2
PFA=10-6
0.0
0
5
10
15
Signal-to-Noise Ratio (dB)
20
25
For high detection probabilities, more signal-to-noise is required for
fluctuating targets.
The fluctuation loss depends on the target fluctuations, probability of
detection, and probability of false alarm.
Radar Systems Course
Detection 11/1/2010
39
IEEE New Hampshire Section
IEEE AES Society
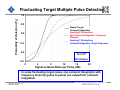
Fluctuating Target Multiple Pulse Detection
Probability of Detection (PD)
1.0
0.8
Steady Target
Coherent Integration
Swerling 2 Fluctuations
Non-Coherent Integration, Frequency
Diversity
Swerling 1 Fluctuations
Coherent Integration, Single Frequency
0.6
0.4
0.2
PFA=10-6
N=4 Pulses
0.0
0
4
8
12
16
20
Signal-to-Noise Ratio per Pulse (dB)
• In some fluctuating target cases, non-coherent integration with
frequency diversity (pulse to pulse) can outperform coherent
integration
Radar Systems Course
Detection 11/1/2010
40
IEEE New Hampshire Section
IEEE AES Society
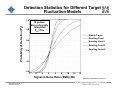
Detection Statistics for Different Target
Fluctuation Models
Probability of Detection (PD)
1.0
10 pulses
Non-coherently
Integrated
0.8
PFA=10-8
Steady Target
Swerling Case I
0.6
Swerling Case II
Swerling Case III
Swerling Case IV
0.4
0.2
0.0
-2
0
2
4
6
8
10
12
Signal-to-Noise Ratio (SNR) (dB)
Radar Systems Course
Detection 11/1/2010
41
14
Adapted from Richards, Reference 7
IEEE New Hampshire Section
IEEE AES Society
Shnidman Empirical Formulae for SNR
(for Steady and Swerling Targets)
•
•
Analytical forms of SNR vs. PD, PFA, and Number of pulses
are quite complex and not amenable to BOTE* calculations
Shnidman has developed a set of empirical formulae that
are quite accurate for most 1st order radar systems
calculations:
K=
α=
∞
Non-fluctuating target (“Swerling 0 / 5”)
1,
N,
2,
Swerling Case 1
Swerling Case 3
2N
Swerling Case 4
Swerling Case 2
0
N ≤ 40
1
4
N > 40
η = − 0.8 ln(4 PFA (1 − PFA )) + sign (PD − 0.5 ) − 0.8 ln (4 PD (1 − PD ))
Adapted from Shnidman in Richards, Reference 7
Radar Systems Course
Detection 11/1/2010
42
* Back of the Envelope
IEEE New Hampshire Section
IEEE AES Society
Shnidman Empirical Formulae for SNR
(for Steady and Swerling Targets)
⎛
N ⎛
1 ⎞ ⎞⎟
⎜
X ∞ = η⎜ η + 2
+ ⎜ α − ⎟⎟
2 ⎝
4 ⎠⎠
⎝
C1 = (((17.7006 PD − 18.4496 ) PD + 14.5339 ) PD − 3.525 ) / K
⎛
⎛ 10 − 5 ⎞ (2 N − 20 ) ⎞ ⎞⎟
1 ⎛⎜ 27.31 PD − 25.14 )
⎟
⎟⎟ +
C2 =
e
+ (PD − 0.8) ⎜⎜ 0.7 ln⎜⎜
⎟⎟
⎜
K⎝
80
⎝ PFA ⎠
⎠⎠
⎝
CdB =
C1
0.1 ≤ PD ≤ 0.872
C1 + C 2
0.872 ≤ PD ≤ 0.99
C X∞
SNR (natural units ) =
N
C = 10
CdB
10
SNR (dB ) = 10 log 10 (SNR )
Adapted from Shnidman in Richards, Reference 7
Radar Systems Course
Detection 11/1/2010
43
IEEE New Hampshire Section
IEEE AES Society
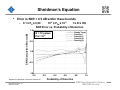
Shnidman’s Equation
•
Error in SNR < 0.5 dB within these bounds
– 0.1 ≤ PD ≤ 0.99
10-9 ≤ PFA ≤ 10-3
1 ≤ N ≤ 100
SNR Error vs. Probability of Detection
SNR Calculation Error (dB)
1.0
0.5
0.0
-0.5
-1.0
0.0
Adapted from Shnidman in Richards, Reference 7
Radar Systems Course
Detection 11/1/2010
44
Steady Target
Swerling I
Swerling II
Swerling III
Swerling IV
N = 10 pulses
PFA= 10-6
0.2
0.4
0.6
0.8
1.0
Probability of Detection
IEEE New Hampshire Section
IEEE AES Society
Outline
Radar Systems Course
Detection 11/1/2010
45
•
Basic concepts
•
Integration of pulses
•
Fluctuating targets
•
Constant false alarm rate (CFAR) thresholding
•
Summary
IEEE New Hampshire Section
IEEE AES Society
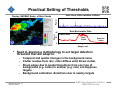
Practical Setting of Thresholds
Ideal Case- Little variation in Noise
Power
Display, NEXRAD Radar, of Rain Clouds
Rain Backscatter Data
Power
40
•
Rain
Cloud
20
0
Courtesy of NOAA
S-Band Data
0
Receiver
Noise
1
Range (nmi)
Need to develop a methodology to set target detection
threshold that will adapt to:
– Temporal and spatial changes in the background noise
– Clutter residue from rain, other diffuse wind blown clutter,
– Sharp edges due to spatial transitions from one type of
background (e.g. noise) to another (e.g. rain) can suppress
targets
– Background estimation distortions due to nearby targets
Radar Systems Course
Detection 11/1/2010
46
IEEE New Hampshire Section
IEEE AES Society
2
Constant False Alarm Rate (CFAR)
Thresholding
Range Î
“Guard”
Cells
•
Cell to be
Thresholded
CFAR Window – Range and Doppler Cells
Doppler Velocity cells Î
CFAR Window – Range Cells
Estimate background (noise, etc.) from data
Range cells Î
Data Cells Used
to Determine
Mean Level of
Background
– Use range, or range and Doppler filter data
– Set threshold as constant times the mean value of background
1 N
• Mean Background Estimate = ∑ xn
N n =1
Radar Systems Course
Detection 11/1/2010
47
IEEE New Hampshire Section
IEEE AES Society
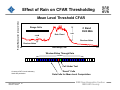
Effect of Rain on CFAR Thresholding
Radar Backscatter (Linear Units)
Mean Level Threshold CFAR
Range Cells
2.2 dB
C Band
5500 MHz
Rain Cloud
9 dB
Receiver Noise
Receiver Noise
2.6
4.5
Slant Range, nmi
Window Slides Through Data
Cell Under Test
Courtesy of MIT Lincoln Laboratory
Used with permission
Radar Systems Course
Detection 11/1/2010
48
“Guard” Cells
Data Cells for Mean Level Computation
IEEE New Hampshire Section
IEEE AES Society
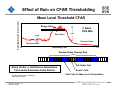
Effect of Rain on CFAR Thresholding
Radar Backscatter (Linear Units)
Mean Level Threshold CFAR
Range Cells
2.2 dB
C Band
5500 MHz
9 dB
Rain Cloud
Receiver Noise
Receiver Noise
2.6
4.5
Slant Range, nmi
Window Slides Through Data
Sharp Clutter or Interference Boundaries
Can Lead to Excessive False Alarms
Courtesy of MIT Lincoln Laboratory
Used with permission
Radar Systems Course
Detection 11/1/2010
49
Cell Under Test
“Guard” Cells
Data Cells for Mean Level Computation
IEEE New Hampshire Section
IEEE AES Society
Greatest-of Mean Level CFAR
•
•
Find mean value of N/2 cells before and after test cell
separately
Use larger noise estimate to determine threshold
Window Slides Through Data
Cell Under Test
Data Cells for Mean Level 1
“Guard” Cells
Data Cells for Mean Level 2
Use Larger Value
•
•
Helps reduce false alarms near sharp clutter or interference
boundaries
Nearby targets still raise threshold and suppress detection
Courtesy of MIT Lincoln Laboratory
Used with permission
Radar Systems Course
Detection 11/1/2010
50
IEEE New Hampshire Section
IEEE AES Society
Censored Greatest-of CFAR
•
Compute and use noise estimates as in Greatest-of, but
remove the largest M samples before computing each
average
Window Slides Through Data
“Censored” Data (Not Used
in Computation of Average)
Data Cells for Mean Level 1
Cell Under Test
“Guard” Cells
Data Cells for Mean Level 2
Use Larger Value
•
•
Up to M nearby targets can be in each window without
affecting threshold
Ordering the samples from each window is computationally
expensive
Radar Systems Course
Detection 11/1/2010
51
IEEE New Hampshire Section
IEEE AES Society
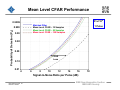
Mean Level CFAR Performance
PFA=10-6
0.9999
Matched Filter
Mean Level CFAR – 10 Samples
Mean Level CFAR – 50 Samples
Mean Level CFAR – 100 Samples
Probability of Detection (PD)
0.999
0.99
1 Pulse
0.90
0.50
CFAR
Loss
0.10
0.01
4
6
8
10
12
14
16
18
Signal-to-Noise Ratio per Pulse (dB)
Radar Systems Course
Detection 11/1/2010
52
IEEE New Hampshire Section
IEEE AES Society
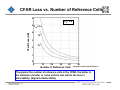
CFAR Loss vs. Number of Reference Cells
6
PD= 0.9
CFAR Loss (dB)
5
PFA=10-8
4
10-6
3
10-4
2
1
0
0
10
20
30
40
Number of Reference Cells
50
Adapted from Richards, Reference 7
The greater the number of reference cells in the CFAR, the better is
the estimate of clutter or noise and the less will be the loss in
detectability. (Signal to Noise Ratio)
Radar Systems Course
Detection 11/1/2010
53
IEEE New Hampshire Section
IEEE AES Society
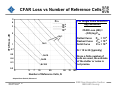
CFAR Loss vs Number of Reference Cells
5
PFA
4
10-4
10-6
10-8
3
CFAR Loss, dB
For Single Pulse Detection
Approximation
CFAR Loss (dB) =
- (5/N) log PFA
2
N=1
Dotted Curve
Dashed Curve
Solid Curve
N=3
1
0.7
PFA = 10-4
PFA = 10-6
PFA = 10-8
N = 15 to 20 (typically)
0.5
N=10
0.4
Since a finite number of
cells are used, the estimate
of the clutter or noise is
not precise.
N=30
0.3
N=100
0.2
2
5
7
10
20
50
70
100
Number of Reference Cells, N
Adapted from Skolnik, Reference 1
Radar Systems Course
Detection 11/1/2010
54
IEEE New Hampshire Section
IEEE AES Society
Summary
•
Both target properties and radar design features affect the
ability to detect signals in noise
– Fluctuating targets vs. non-fluctuating targets
– Allowable false alarm rate and integration scheme (if any)
•
Integration of multiple pulses improves target detection
– Coherent integration is best when phase information is available
– Noncoherent integration and frequency diversity can improve
detection performance, but usually not as efficient
•
An adaptive detection threshold scheme is needed in real
environments
– Many different CFAR (Constant False Alarm Rate) algorithms exist
to solve various problems
– All CFARs algorithms introduce some loss and additional
processing
Radar Systems Course
Detection 11/1/2010
55
IEEE New Hampshire Section
IEEE AES Society
References
1. Skolnik, M., Introduction to Radar Systems, McGraw-Hill,
New York,3rd Ed., 2001.
2. Skolnik, M., Radar Handbook, McGraw-Hill, New York, 3rd
Ed., 2008.
3. DiFranco, J. V. and Rubin, W. L., Radar Detection, Artech
House, Norwood, MA, 1994.
4. Whalen, A. D. and McDonough, R. N., Detection of Signals in
Noise, Academic Press, New York, 1995.
5. Levanon, N., Radar Principles, Wiley, New York, 1988
6. Van Trees, H., Detection, Estimation, and Modulation
Theory, Vols. I and III, Wiley, New York, 2001
7. Richards, M., Fundamentals of Radar Signal Processing,
McGraw-Hill, New York, 2005
8. Nathanson, F., Radar Design Principles, McGraw-Hill, New
York, 2rd Ed., 1999.
Radar Systems Course
Detection 11/1/2010
56
IEEE New Hampshire Section
IEEE AES Society
Homework Problems
•
From Skolnik, Reference 1
– Problems 2.5, 2.6, 2.15, 2.17, 2.18, 2.28, and 2.29
– Problems 5.13 , 5.14, and 5-18
Radar Systems Course
Detection 11/1/2010
57
IEEE New Hampshire Section
IEEE AES Society