Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Truncated variation - its properties and
applications in stochastic analysis
Rafał M. Łochowski
Osaka 2015
Rafał M. Łochowski
Truncated variation
Osaka 2015
1 / 51
Outline
1
Definition and basic properites
2
The truncated variation as a measure of path irregularity
3
Realized volatility estimation
4
Limit theorems for segment crossings
Rafał M. Łochowski
Truncated variation
Osaka 2015
2 / 51
Truncated variation - definition
For a path f : [a; b] → E , where E is a normed space with norm | · |, its
truncated variation is defined with the following formula
n−1
TVc (f , [a; b]) := sup
sup
∑ max {|f (ti +1) − f (ti )| − c , 0} ,
n a≤t1 <t2 <...<tn ≤b i =1
(1)
where c > 0 is the truncation parameter.
Fact
If E is complete (i.e. Banach) space, then TVc (f , [a; b]) < +∞ for any
c > 0 iff f is regulated, i.e. it has right and left limits.
Rafał M. Łochowski
Truncated variation
Osaka 2015
3 / 51
Truncated variation - basic properties
Let kf − g k∞ := supt ∈[a;b] |f (t ) − g (t )| .
From the triangle inequality, for g such that kf − g k∞ ≤ c /2, we
immediately get
|f (ti +1 ) − f (ti )| − c ≤ |g (ti +1 ) − g (ti )|
and from this
TVc (f , [a; b]) ≤ TV (g , [a; b]) ,
(2)
where TV (g , [a; b]) is just the (total) variation of g .
Rafał M. Łochowski
Truncated variation
Osaka 2015
4 / 51
Truncated variation - basic properties
Let kf − g k∞ := supt ∈[a;b] |f (t ) − g (t )| .
From the triangle inequality, for g such that kf − g k∞ ≤ c /2, we
immediately get
|f (ti +1 ) − f (ti )| − c ≤ |g (ti +1 ) − g (ti )|
and from this
TVc (f , [a; b]) ≤ TV (g , [a; b]) ,
(2)
where TV (g , [a; b]) is just the (total) variation of g .
Remark
The fact stated on the previous slide becomes clear when one recalls
that the family of regulated functions attaing values in a Banach space
coincides with the family of functions which may be uniformly
approximated by finite variation functions (equivalently: by step
functions) with an arbitrary accuracy.
Rafał M. Łochowski
Truncated variation
Osaka 2015
4 / 51
Truncated variation - variational property
When f is a real function, then the bound (2) is attainable, i.e. there
exists a function f c : [a; b] → R, such that kf − g k∞ ≤ c /2 and
TVc (f , [a; b]) = TV (f c , [a; b])
Thus, we have the following variational property of TV c :
TVc (f , [a; b]) =
Rafał M. Łochowski
inf
kf −g k∞ ≤c /2
Truncated variation
TV (g , [a; b]) .
(3)
Osaka 2015
5 / 51
Truncated variation - variational property
When f is a real function, then the bound (2) is attainable, i.e. there
exists a function f c : [a; b] → R, such that kf − g k∞ ≤ c /2 and
TVc (f , [a; b]) = TV (f c , [a; b])
Thus, we have the following variational property of TV c :
TVc (f , [a; b]) =
inf
kf −g k∞ ≤c /2
TV (g , [a; b]) .
(3)
Remark
It is an open question if property (3) holds in other spaces than R. Even
for spaces E where the equality does not hold, it seems to be interesting
to assess how much the left side of (3) differs from the right side.
Rafał M. Łochowski
Truncated variation
Osaka 2015
5 / 51
Truncated variation - asymptotics
From definition (1) or variational property (3) (for real paths) we
naturally have that
lim TVc (f , [a; b]) = TV (f , [a; b]) .
c ↓0
If TV (f , [a; b]) = +∞ (which is common for many important families of
stochastic processes) the rate of the divergence of TVc (f , [a; b]) to +∞
as c ↓ 0 may be viewed as the measure of irregularity of the path f
Rafał M. Łochowski
Truncated variation
Osaka 2015
6 / 51
p−variation
Naturally, in analysis there were many other notions of variations
introduced. One of the most natural seems to be the p−variation,
p > 0, defined as
n−1
p
V (f , [a; b]) := sup
n
|f (ti +1 ) − f (ti )|p .
∑
a≤t <t <...<t ≤b
sup
1
2
n
(4)
i =1
For any f , if Vp (f , [a; b]) < +∞ and q > p > 0, then Vq (f , [a; b]) < +∞.
Rafał M. Łochowski
Truncated variation
Osaka 2015
7 / 51
p−variation
Naturally, in analysis there were many other notions of variations
introduced. One of the most natural seems to be the p−variation,
p > 0, defined as
n−1
p
V (f , [a; b]) := sup
n
|f (ti +1 ) − f (ti )|p .
∑
a≤t <t <...<t ≤b
sup
1
2
n
(4)
i =1
For any f , if Vp (f , [a; b]) < +∞ and q > p > 0, then Vq (f , [a; b]) < +∞.
This observation makes meaningful to define the variation index
Indvar (f ) := inf {p : Vp (f , [a; b]) < +∞} ,
which may be also viewed as a measure of irregularity of the path - the
greater Indvar (f ) , the more irregular path.
Rafał M. Łochowski
Truncated variation
Osaka 2015
7 / 51
p−variation
Naturally, in analysis there were many other notions of variations
introduced. One of the most natural seems to be the p−variation,
p > 0, defined as
n−1
p
V (f , [a; b]) := sup
n
|f (ti +1 ) − f (ti )|p .
∑
a≤t <t <...<t ≤b
sup
1
2
n
(4)
i =1
For any f , if Vp (f , [a; b]) < +∞ and q > p > 0, then Vq (f , [a; b]) < +∞.
This observation makes meaningful to define the variation index
Indvar (f ) := inf {p : Vp (f , [a; b]) < +∞} ,
which may be also viewed as a measure of irregularity of the path - the
greater Indvar (f ) , the more irregular path.
Remark
If f is a step function then Indvar (f ) = 0, otherwise usually Indvar (f ) ≥ 1.
Rafał M. Łochowski
Truncated variation
Osaka 2015
7 / 51
The variation index vs. the asymptotics of the
truncated variation
Let G ([a; b]) denote the set of real-valued, regulated functions
f : [a; b] → R.
Rafał M. Łochowski
Truncated variation
Osaka 2015
8 / 51
The variation index vs. the asymptotics of the
truncated variation
Let G ([a; b]) denote the set of real-valued, regulated functions
f : [a; b] → R.
For p ≥ 1 let V p ([a; b]) denote the subset of G ([a; b]) consisting of
functions with finite p−variation.
Rafał M. Łochowski
Truncated variation
Osaka 2015
8 / 51
The variation index vs. the asymptotics of the
truncated variation
Let G ([a; b]) denote the set of real-valued, regulated functions
f : [a; b] → R.
For p ≥ 1 let V p ([a; b]) denote the subset of G ([a; b]) consisting of
functions with finite p−variation.
Next, for p ≥ 1 let U p ([a; b]) denote the subset of G ([a; b]) consisting
of functions f for which
lim sup c p−1 · TVc (f , [a; b]) < +∞.
c ↓0
Rafał M. Łochowski
Truncated variation
Osaka 2015
8 / 51
The variation index vs. the asymptotics of the
truncated variation
Let G ([a; b]) denote the set of real-valued, regulated functions
f : [a; b] → R.
For p ≥ 1 let V p ([a; b]) denote the subset of G ([a; b]) consisting of
functions with finite p−variation.
Next, for p ≥ 1 let U p ([a; b]) denote the subset of G ([a; b]) consisting
of functions f for which
lim sup c p−1 · TVc (f , [a; b]) < +∞.
c ↓0
We have U 1 ([a; b]) = V 1 ([a; b]) and for any 1 < p < q we have
V p ([a; b]) ( U p ([a; b]) ( V q ([a; b]) .
Rafał M. Łochowski
Truncated variation
Osaka 2015
8 / 51
Irregularity of a typical Brownian path
If B is a standard Brownian motion, then Indvar (B ) = 2 with probability
1.
However, an old result of P. Lévy states that V2 (B , [a; b]) = +∞ with
probability 1, thus B ∈
/ V 2 ([0; t ]) with probability 1.
Rafał M. Łochowski
Truncated variation
Osaka 2015
9 / 51
Irregularity of a typical Brownian path
If B is a standard Brownian motion, then Indvar (B ) = 2 with probability
1.
However, an old result of P. Lévy states that V2 (B , [a; b]) = +∞ with
probability 1, thus B ∈
/ V 2 ([0; t ]) with probability 1.
On the other hand, in [LM2013] it was proven that for any t > 0,
lim c · TVc (B , [0; t ]) = t ,
c →0
with probability 1,
thus B ∈ U 2 ([0; t ]) with probability 1.
Rafał M. Łochowski
Truncated variation
Osaka 2015
9 / 51
Irregularity of a typical Brownian path
If B is a standard Brownian motion, then Indvar (B ) = 2 with probability
1.
However, an old result of P. Lévy states that V2 (B , [a; b]) = +∞ with
probability 1, thus B ∈
/ V 2 ([0; t ]) with probability 1.
On the other hand, in [LM2013] it was proven that for any t > 0,
lim c · TVc (B , [0; t ]) = t ,
c →0
with probability 1,
thus B ∈ U 2 ([0; t ]) with probability 1.
Remark
In [LM2013] there was a more general fact proven: if Xt , t ≥ 0, is a
continuous semimartingale with quadratic variation < · > then for any
t > 0,
lim c · TVc (X , [0; t ]) =< X >t , with probability 1.
c →0
Rafał M. Łochowski
Truncated variation
Osaka 2015
9 / 51
Irregularity of a typical Brownian path measured
by ϕ− variation
For a continuous, increasing function ϕ : [0; +∞) → [0; +∞) such that
ϕ (0) = 0 one may define ϕ−variation as
n−1
ϕ
V (f , [a; b]) := sup
sup
∑ ϕ (|f (ti +1) − f (ti )|) .
(5)
n a≤t1 <t2 <...<tn ≤b i =1
Rafał M. Łochowski
Truncated variation
Osaka 2015
10 / 51
Irregularity of a typical Brownian path measured
by ϕ− variation
For a continuous, increasing function ϕ : [0; +∞) → [0; +∞) such that
ϕ (0) = 0 one may define ϕ−variation as
n−1
ϕ
V (f , [a; b]) := sup
∑ ϕ (|f (ti +1) − f (ti )|) .
sup
(5)
n a≤t1 <t2 <...<tn ≤b i =1
An old result of S. J. Taylor [T1972] states that
ϕ0 (x ) = x 2 / ln (max [ln (1/x ) , 2])
is a function with the greatest order in the neighbourhood of 0 and such
that for any t > 0,
Vϕ0 (B , [0; t ]) < +∞,
Rafał M. Łochowski
with probability 1.
Truncated variation
Osaka 2015
10 / 51
Irregularity of a typical Brownian path measured
by ϕ− variation, cont.
ϕ(x )
Moreover, for any function ϕ such that limx ↓0 ϕ (x ) = +∞ and t > 0 we
0
have
Vϕ (B , [0; t ]) = +∞,
with probability 1.
Remark
The asymptotics of the truncated variation for functions with finite
ϕ−variation is still to be investigated.
Rafał M. Łochowski
Truncated variation
Osaka 2015
11 / 51
Truncated variation, p−variation and ϕ−variation
norms of a Brownian path
The already mentioned irregularity results for the Brownian paths may
be stated using p−variation, ϕ−variation and truncated variation
norms, defined as
kB kp−var ,[0;T ] := (Vp (B , [0; T ]))1/p ,
for p ≥ 1,
kB kϕ−var ,[0;T ] := inf {λ > 0 : Vϕ (B /λ, [0; T ]) ≤ 1} ,
and
kB kTV ,p,[0;T ] := sup c
p−1
1/p
· TV (B , [0; T ])
,
c
for p ≥ 1.
c >0
Rafał M. Łochowski
Truncated variation
Osaka 2015
12 / 51
Truncated variation, p−variation and ϕ−variation
norms of a Brownian path
The already mentioned irregularity results for the Brownian paths may
be stated using p−variation, ϕ−variation and truncated variation
norms, defined as
kB kp−var ,[0;T ] := (Vp (B , [0; T ]))1/p ,
for p ≥ 1,
kB kϕ−var ,[0;T ] := inf {λ > 0 : Vϕ (B /λ, [0; T ]) ≤ 1} ,
and
kB kTV ,p,[0;T ] := sup c
p−1
1/p
· TV (B , [0; T ])
,
c
for p ≥ 1.
c >0
Remark
One always has
kB kTV ,p,[0;T ] ≤ kB kp−var ,[0;T ] .
Rafał M. Łochowski
Truncated variation
Osaka 2015
12 / 51
Truncated variation, p−variation and ϕ−variation
norms of a Brownian path, cont.
For such defined p−variation, ϕ−variation and truncated variation
norms, we have
(
< +∞ if p ∈ (2; +∞),
kB kp,[0;T ] =
+∞ if p ∈ [1; 2];
kB kϕ,[0;T ] =
and
(
< +∞ if
+∞ if
ϕ(x )
limx ↓0 ϕ (x ) < +∞,
0
ϕ(x )
limx ↓0 ϕ (x ) = +∞
0
(
< +∞ if p ∈ [2; +∞),
kB kTV ,p,[0;T ] =
+∞ if p ∈ [1; 2).
Rafał M. Łochowski
Truncated variation
Osaka 2015
13 / 51
Truncated variation vs. p−variation norms of a
fractional Brownian path
Similarly, for a fractional Brownian BH motion with the Hurst parameter
H ∈ (0; 1) we have
(
< +∞ if p ∈ (1/H ; +∞),
kBH kp,[0;T ] =
+∞ if p ∈ [1; 1/H ]
and
(
< +∞ if p ∈ [1/H ; +∞),
kBH kTV ,p,[0;T ] =
+∞ if p ∈ [1; 1/H ).
Thus, for each T > 0
BH ∈ U 1/H ([0; T ]) \V 1/H ([0; T ]) ,
Rafał M. Łochowski
Truncated variation
with probability1.
Osaka 2015
14 / 51
Young integrals of irregular paths
Using truncated variation techniques it is possible to prove the following,
stronger version of Young’s result from 1936 [Young, 1936]:
Theorem
Let f , g : [a; b] → R be two functions with no common points of
discontinuity. If f ∈ U p ([a; b]) and g ∈ U q ([a; b]) , where p > 1, q > 1,
´b
p−1 + q −1 > 1, then the Riemann Stieltjes a f (t ) dg (t ) exists.
Moreover, there exist a constant Cp,q , depending on p and q only, such
that
ˆ b
f
(
t
)
d
g
(
t
)
−
f
(
a
)
[
g
(
b
)
−
g
(
a
)]
a
p−p/q
1+p/q −p
≤ Cp,q kf kTV ,p,[a;b] kf kosc ,[a;b] kg kTV ,q ,[a;b] ,
where kf kosc ,[a;b] := supa≤s<t ≤b |f (t ) − f (s)|.
Rafał M. Łochowski
Truncated variation
Osaka 2015
15 / 51
How to calculate the truncated variation?
There exists an algorithm based on drawdown and drawup times. Let
us define
TUc f = inf t ∈ (a; b] : f (t ) − inf f (s) > c
a≤s≤t
TDc f
Rafał M. Łochowski
= inf t ∈ (a; b] : sup f (s) − f (t ) > c
a≤s≤t
Truncated variation
Osaka 2015
16 / 51
How to calculate the truncated variation?
There exists an algorithm based on drawdown and drawup times. Let
us define
TUc f = inf t ∈ (a; b] : f (t ) − inf f (s) > c
a≤s≤t
TDc f
If min
TUc f <
= inf t ∈ (a; b] : sup f (s) − f (t ) > c
a≤s≤t
TUc f , TDc f = +∞, then TVc (f , [a; b]) = 0. If not, assuming
TDc f we define TDc ,−1 f = a and then for k = 0, 1, 2, . . .
(
TUc ,k f = inf
)
t ∈ (TDc ,k −1 f ; b] : f (t ) −
inf
TDc ,k −1 f ≤s≤t
f (s ) > c
(
TDc ,k f = inf
Rafał M. Łochowski
that
,
)
t ∈ (TUc ,k f ; b] :
sup
f (s) − f (t ) > c
.
TUc ,k f ≤s≤t
Truncated variation
Osaka 2015
16 / 51
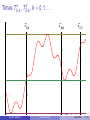
Times TUc ,k , TDc ,k , k = 0, 1, . . .
c
TU,0
2.5
c
TD,0
c
TU,1
2.0
c
1.5
c
1.0
0.5
0.0
c
-0.5
Rafał M. Łochowski
Truncated variation
Osaka 2015
17 / 51
Calculation of the truncated variation, cont.
Now, to calculate the truncated variation we define
mk =
inf
s∈[TD ,k −1 ;TU ,k ]
f (s),
Mk =
inf
s∈[TU ,k ;TD ,k ]
f (s),
and for t such that t ∈ [TU ,k ; TD ,k ] we have
k −1
TVc (f , [a; t ]) =
k −1
∑ (Mi − mi − c ) + ∑ (Mi − mi +1 − c )
i =0
+
(6)
i =0
sup
f ( s ) − mk − c .
s∈[TUc ,k f ,t ]
Similarly, for t such that t ∈ [TD ,k ; TU ,k +1 ] we have
k −1
k
TVc (f , [a; t ]) =
∑ (Mi − mi − c ) +
i =0
+ Mk −
Rafał M. Łochowski
inf
∑ (Mi − mi +1 − c )
(7)
i =0
f (s ) − c .
s∈[TDc ,k f ,t ]
Truncated variation
Osaka 2015
18 / 51
Stopping times TUc ,k , TDc ,k , k = 0, 1, . . .
If Xt , t ≥ 0, is a stochastic process with càdlàg (or even regulated!)
trajectories, adapted to the filtration Ft , t ≥ 0, then for each trajectory
f = X (ω) the just defined times TUc ,k , TDc ,k , k = 0, 1, . . . are stopping
times such that
lim TUc ,k = lim TDc ,k = +∞,
k →+∞
Rafał M. Łochowski
k →+∞
Truncated variation
with probability 1.
Osaka 2015
19 / 51
Stopping times TUc ,k , TDc ,k , k = 0, 1, . . .
If Xt , t ≥ 0, is a stochastic process with càdlàg (or even regulated!)
trajectories, adapted to the filtration Ft , t ≥ 0, then for each trajectory
f = X (ω) the just defined times TUc ,k , TDc ,k , k = 0, 1, . . . are stopping
times such that
lim TUc ,k = lim TDc ,k = +∞,
k →+∞
k →+∞
with probability 1.
To see this, note that for any t > 0 there exists such K < +∞ that
TUc ,K > t and TDc ,K > t . Otherwise we would obtain two infinite
∞
∞
sequences (sk )k =1 , (Sk )k =1 such that 0 ≤ s1 < S1 < s2 < S2 < ... < t
and f (Sk ) − f (sk ) ≥ 12 c . But this is a contradiction, since f is a
∞
∞
regulated function and (f (sk ))k =1 , (f (Sk ))k =1 have a common limit.
Rafał M. Łochowski
Truncated variation
Osaka 2015
19 / 51
Calculation of the truncated variation of a process
with continuous trajectories
When Xt , t ≥ 0, is a stochastic process with continuous trajectories
then for any t > 0, TVc (X , [0; t ]) may be calculated with the stochastic
sampling scheme based on the stopping times TUc ,k , TDc ,k , k = 0, 1, . . . .
Indeed, for continuous f = X (ω) we have XTUc ,k (ω) = f (TUc ,k ) = mk + c
and XTDc ,k (ω) = f (TDc ,k ) = Mk − c , hence from formulas (6) and (7) we
have
TVc X , [0; TUc ,k ] =
k −1 XTDc ,i − XTUc ,i + c +
∑
i =0
k −1 XTDc ,i − XTUc ,i +1 + c .
∑
i =0
Similarly,
k
TV
c
X , [0; TDc ,k ]
=
∑
i =0
Rafał M. Łochowski
XTDc ,i − XTUc ,i + c +
Truncated variation
k −1 ∑
i =0
XTDc ,i − XTUc ,i +1 + c .
Osaka 2015
20 / 51
Realized volatility estimation
If Xt , t ≥ 0, is a continuous semimartingale then the (mentioned
already) relation
c · TVc (X , [0; t ]) →< X >t ,
with probability 1
(8)
(in the uniform convergence topology on compacts) and the stated
algorithm provides us with a tool for the realized volatility estimation.
Rafał M. Łochowski
Truncated variation
Osaka 2015
21 / 51
Realized volatility estimation
If Xt , t ≥ 0, is a continuous semimartingale then the (mentioned
already) relation
c · TVc (X , [0; t ]) →< X >t ,
with probability 1
(8)
(in the uniform convergence topology on compacts) and the stated
algorithm provides us with a tool for the realized volatility estimation.
Remark
The rate of convergence in (8) is better than the rate of the usual
algorithms based on the calendar time or business time sampling (this
was proved at least for some class of diffusions), and is of the same
order as the order of tick time sampling schemes, which are special
case of stochastic sampling schemes for realized volatility estimation
introduced by Masaaki Fukasawa [F2010].
Rafał M. Łochowski
Truncated variation
Osaka 2015
21 / 51
Rate of convergence in (8)
Let Xt , t ≥ 0 be the strong solution of the SDE
dXt = µ (Xt ) dt + σ (Xt ) dBt , where B is a standard Brownian motion
and µ, σ > 0 satisfy ”usual” conditions guaranteeing the existence
uniqueness of the strong solution of SDE. In [LM2013] the following
result was proven
1
c
(c · TVc (X , [0; t ]) − < X >t ) ⇒ W<X >t /3 ,
where W is another standard Brownian motion, independent from B
and the convergence ⇒ is understood as the stable convergence in the
uniform convergence topology on compacts.
Rafał M. Łochowski
Truncated variation
Osaka 2015
22 / 51
Stochastic sampling schemes for realized volatility
estimation
Masaaki Fukasawa considered general stochastic sampling schemes
and obtained similar rates of convergence for tick sampling.
He considered a continuous semimartingale X = A + M , where Mt ,
t ≥ 0, is a continuous local martingale adapted to some filtration Ft ,
t ≥ 0,´and At , t ≥ 0, is a finite variation process such that
t
At = 0 ψs d < M >s , where ψs , t ≥ 0, is locally bounded, left
continuous process adapted to Ft and a sequence of Ft −stopping
times 0 = τ0 < τ1 < . . . such that for every T > 0
Nτ (t ) := max {k ≥ 0 : τk > t } < +∞,
Rafał M. Łochowski
Truncated variation
with probability 1.
Osaka 2015
23 / 51
Stochastic sampling schemes for realized volatility
estimation, cont.
The statistics
Nτ (t )−1
RVτ (t ) :=
∑
(Xτk +1 − Xτk )2
k =0
is an estimator of < X >t and the rate of convergence of this statistics
depends on the sequence τ = {τ0 < τ1 < . . . } .
The best rates of convergence one obtains taking e.g. tick sampling, i.e.
τc0 = 0 and for k = 0, 1, . . .
n
o
τck +1 = inf t > tk : Xt − Xτck > c ,
and we have stable convergence to a non-trivial limit of the processes
1
c
Rafał M. Łochowski
(RVτc (t ) − < X >t ) .
Truncated variation
Osaka 2015
24 / 51
Stochastic sampling schemes for realized volatility
estimation, general remarks
With the tick time sampling (based on stopping times τck ) (or the
truncated variation sampling based on stopping times TUc ,k , TDc ,k ,)
we need to control the process very precisely (no unobserved big
fluctuations between consecutive samplings) like in the case of
the calendar time sampling τk = k /n.
As a reward for this we obtain a better mode of the first order
convergence (almost sure convergence instead of the
convergence in probability) and a better asymptotics of the second
order convergence.
This is no problem as long we assume that we are able to observe
rounded values of the process X at any time.
The tick time sampling or the truncated variation sampling are
robust to the price rounding (market microstructure noise).
Rafał M. Łochowski
Truncated variation
Osaka 2015
25 / 51
Variational properties of the tick sampling scheme
The tick time sampling scheme has also interesting property regarding
the total variation of the càdlàg process X̂ c defined as
X̂tc = Xτck ,
where k = max {i = 0, 1, 2, . . . : τci ≤ t } .
This process approximates the process X with accuracy c and we have
TV X̂ c , [0; t ] = c · Nτ (t )
and
RVτc (t ) := c 2 · Nτc (t ) = c · TV X̂ c , [0; t ] .
Thus, recalling
the convergence results for RVcτc (t ) we get that
c
TV X̂ , [0; t ] has the same magnitude as TV (X , [0; t ]) and it
approximates uniformly X with accuracy c (which differs from the
optimal accuracy for a process with the total vatiation TVc (X , [0; t ]) by
factor 2).
Rafał M. Łochowski
Truncated variation
Osaka 2015
26 / 51
The truncated variation and segment crossings
The truncated variation appears to be esspecially relevant for the
investigation of the numbers of segment crossings. First, let us recall
the Banch Indicatrix theorem. If f : [a, b] → R is a continuous function
then
ˆ
N y (f , [a; b]) dy ,
TV (f , [a; b]) =
R
where
N y (f , [a; b]) := card {x ∈ [a; b] : f (x ) = y }
is called the Banach indicatrix. A generalisation of this result for the
case of regulated f is possible.
Unfortunately, when TV (f , [a; b]) = +∞ this result seems to be useless.
Rafał M. Łochowski
Truncated variation
Osaka 2015
27 / 51
The truncated variation and segment crossings,
cont.
However, when instead of considering the level crossings, one
considers segment crossings and instead of considering the total
variation one considers the truncated variation then one gets the
following result.
For any regulated f : [a; b] → R and c > 0,
ˆ
y
c
TV (f , [a; b]) =
nc (f , [a; b]) dy .
(9)
R
Here,
y
nc (f , [a; b]) = number of times that f crosses the segment [y ; y + c ].
(10)
Rafał M. Łochowski
Truncated variation
Osaka 2015
28 / 51
Segment crossings - precise definition
To be more precise, we define
y
y
y
nc (f , [a, b]) = dc (f , [a, b]) + uc (f , [a, b]) .
y
dc (f , [a, b]) = number of downcrossings the segment [y ; y + c ]..
σ0 = a, and for k = 0, 1, . . .
νk = inf {t > σk : f (t ) > y + c }
σk +1 = inf {t > νk : f (t ) < y } .
Now we define
y
dc (f , [a, b]) = max {k : σk ≤ b} .
Rafał M. Łochowski
Truncated variation
Osaka 2015
29 / 51
Segment crossings - precise definition
To be more precise, we define
y
y
y
nc (f , [a, b]) = dc (f , [a, b]) + uc (f , [a, b]) .
y
dc (f , [a, b]) = number of downcrossings the segment [y ; y + c ]..
σ0 = a, and for k = 0, 1, . . .
νk = inf {t > σk : f (t ) > y + c }
σk +1 = inf {t > νk : f (t ) < y } .
Now we define
y
dc (f , [a, b]) = max {k : σk ≤ b} .
y
dc (f , [a, b]) = number of downcrossings the segment [y ; y + c ].
σ̃0 = a, and for k = 0, 1, . . .
ν̃k = inf {t > σ̃k : f (t ) < y }
σ̃k +1 = inf {t > ν̃k : f (t ) > y + c } .
y
uc (f , [a, b]) = max {k : σ̃k ≤ b} .
Rafał M. Łochowski
Truncated variation
Osaka 2015
29 / 51
Limit theorems for segment crossings
Relation (9), linking the truncated variation with the numbers of
segment crossings, allows to obtain, for relatively broad spectrum of
stochastic processes, limit theorems for the numbers of segment
crossings of these processes.
For example, for a continuous semimartingale Xt , t ≥ 0, using the
already mentioned convergence
c · TVc (X , [0; t ]) →< X >t ,
with probability 1
one obtains the convergence
ˆ
y
c · nc (X , [0; t ]) dy →< X >t ,
with probability 1.
R
It is also possible to make some of the levels more important than
others, by introducing continuous density g : R → R, and obtain
ˆ
ˆ
y
c · nc
(X , [0; t ]) g (y )dy →
t
g (Xs ) d < X >s ,
with probability 1.
0
R
Rafał M. Łochowski
Truncated variation
Osaka 2015
(11)
30 / 51
Limit theorems for segment crossings, diffusions
Similalry, from the already mentioned convergence
1
c
TV (X , [0; t ]) −
c
< X >t
⇒ W<X >t /3 ,
for Xt , t ≥ 0, being the strong solution of the SDE
dXt = µ (Xt ) dt + σ (Xt ) dBt , where B is a standard Brownian motion
and µ, σ > 0 satisfy ”usual” conditions guaranteeing the existence
uniqueness of the strong solution of SDE, and any continuous function
g : R → R, the following convergence of the integrated numbers of
segment crossings was obtained ([LG2014]):
ˆ
y
nc
(X , [0; t ]) g (y )dy −
R
1
c
ˆ
t
ˆ
g (Xs ) d < X >s
0
⇒
t
g (Xs ) W <X >t ,
3
0
where B and W are two independent standard Brownian motions.
Rafał M. Łochowski
Truncated variation
Osaka 2015
31 / 51
Limit theorems for segment down-, up- crossings,
diffusions
Together with the convergence of segment crossings, one has (obvious)
first order convergence of segment down- and up- crossings (since
y
y
uc (X , [0; t ]) − dc (X , [0; t ]) ∈ {−1, 0, 1}):
ˆ
y
c · uc
(X , [0; t ]) g (y )dy →
R
1
2
ˆ
t
g (Xs ) d < X >s ,
with probability 1.
0
But in the case of the second order convergence an interesting
correction term (the Stratonovich integral) appears:
ˆ
y
uc
R
1
ˆ
t
g (Xs ) d < X >s
(X , [0; t ]) g (y )dy −
2·c 0
ˆ
ˆ
1 t
1 t
⇒
g (Xs ) W <X >t +
g (Xs ) ◦ dXs ,
2
0
3
2
0
where B and W are two independent standard Brownian motions.
Rafał M. Łochowski
Truncated variation
Osaka 2015
32 / 51
Segment crossings and local times of diffusions
y
Let Lt (X ) be the local time of X at y ∈ R and g : R → R be a
continuous function. Recalling the occupation times formula
ˆ
ˆ
t
y
g (Xs ) d < X >s =
0
we get
ˆ y
nc
(X , [0; t ]) −
R
Rafał M. Łochowski
g (y ) Lt (X ) dy .
R
1
c
y
Lt
ˆ t
(X ) g (y ) dy ⇒
g (Xs ) W <X >t .
0
Truncated variation
3
Osaka 2015
33 / 51
Segment crossings and local times of diffusions
y
Let Lt (X ) be the local time of X at y ∈ R and g : R → R be a
continuous function. Recalling the occupation times formula
ˆ
ˆ
t
y
g (Xs ) d < X >s =
0
we get
ˆ y
nc
(X , [0; t ]) −
R
g (y ) Lt (X ) dy .
R
1
c
y
Lt
ˆ t
(X ) g (y ) dy ⇒
g (Xs ) W <X >t .
0
3
On the other hand, we have the following convergence ([Kasahara,
1980] for a standard Brownian motion, [LG2014, Theorem 4.5] for
diffusions)
√
1 y
y
c nc (X , [0; t ]) − Lt (X ) ⇒ WLy (X ) .
t
c
Rafał M. Łochowski
Truncated variation
Osaka 2015
33 / 51
Segment crossings and local times of diffusions
y
Let Lt (X ) be the local time of X at y ∈ R and g : R → R be a
continuous function. Recalling the occupation times formula
ˆ
ˆ
t
y
g (Xs ) d < X >s =
0
we get
ˆ y
nc
(X , [0; t ]) −
R
g (y ) Lt (X ) dy .
R
1
c
y
Lt
ˆ t
(X ) g (y ) dy ⇒
g (Xs ) W <X >t .
0
3
On the other hand, we have the following convergence ([Kasahara,
1980] for a standard Brownian motion, [LG2014, Theorem 4.5] for
diffusions)
√
1 y
y
c nc (X , [0; t ]) − Lt (X ) ⇒ WLy (X ) .
t
c
y
Thus we see that integrating differences nc (X , [0; ·]) − 1c Ly (X ) we get
√
much faster convergence (multiplication by c is no needed).
Rafał M. Łochowski
Truncated variation
Osaka 2015
33 / 51
”Meta-theorem”, almost sure convergence
For a process Xt , t ≥ 0, let us denote TVc (X , ·) := TVc (X , [0; ·]) and
nca (X , ·) := nca (X , [0; ·]).
Rafał M. Łochowski
Truncated variation
Osaka 2015
34 / 51
”Meta-theorem”, almost sure convergence
For a process Xt , t ≥ 0, let us denote TVc (X , ·) := TVc (X , [0; ·]) and
nca (X , ·) := nca (X , [0; ·]).
Theorem (M1)
Let Xt , t ≥ 0, be a càdlàg process and assume that there exists an
increasing function ϕ : (0; +∞) → (0; +∞) , such that limc →0+ ϕ (c ) = 0,
and a càdlàg process ζt , t ≥ 0, with locally finite variation, such that the
following convergence holds
ϕ (c ) TVc (X , ·) → ζ.
Then for any continuous function f : R → R we have the following
convergence
ˆ
ˆ
nca (X , ·)f
ϕ (c )
(a) da →
f (Xt − ) dζt .
0
R
Rafał M. Łochowski
·
Truncated variation
Osaka 2015
34 / 51
”Meta-theorem”, stable convergence
Theorem (M2)
Let Xt , t ≥ 0, be a càdlàg process and assume that there exists an
increasing function ϕ : (0; +∞) → (0; +∞) , with limc →0+ ϕ (c ) = 0, and
a càdlàg process ζt , t ≥ 0, with locally finite variation, such that the
following convergence holds
ϕ (c ) TV c (X , ·) ⇒ ζ
then for any continuous function f : R → R we have the following
convergence
ˆ
ˆ
nca (X , ·)f (a)da
ϕ (c )
⇒
f (Xt − ) dζt .
0
R
Rafał M. Łochowski
·
Truncated variation
Osaka 2015
35 / 51
Self-similar processes
Theorem (SsP)
Let Xt , t ≥ 0, be a càdlàg process such that it has stationary
increments. Next, assume that X is a self-similar proces, that is, there
exists β ∈ (0; 1) such that
n
A
−β
o
XAt , t ≥ 0 =d {Xt , t ≥ 0}
for any A > 0. Additionally we assume that for some c > 0,
ETVc (X , [0, 1]) < +∞ and that the tail σ-field is trivial. Then
c 1/β−1 TVc (X , ·) → C · Id .
Rafał M. Łochowski
Truncated variation
Osaka 2015
36 / 51
Lévy processes
Theorem (LP1)
Let Xt , t ≥ 0, be a Lévy process which has infinite total variation and is
no monotonic on any non-degenerate interval. Moreover, assume that
E sup0≤t <T c0 X Xt < +∞ for some c0 > 0, where we define
D
TDc X := inf t ≥ 0 : sup0≤s≤t Xs − Xt > c ,
Rafał M. Łochowski
Truncated variation
θcU := ETDc X
Osaka 2015
37 / 51
Lévy processes
Theorem (LP1)
Let Xt , t ≥ 0, be a Lévy process which has infinite total variation and is
no monotonic on any non-degenerate interval. Moreover, assume that
E sup0≤t <T c0 X Xt < +∞ for some c0 > 0, where we define
D
TDc X := inf t ≥ 0 : sup0≤s≤t Xs − Xt > c ,
ξcU := sup0≤s<t <TDc X (Xt − Xs − c )+ ,
Rafał M. Łochowski
Truncated variation
θcU := ETDc X
ηcU := EξcU .
Osaka 2015
37 / 51
Lévy processes
Theorem (LP1)
Let Xt , t ≥ 0, be a Lévy process which has infinite total variation and is
no monotonic on any non-degenerate interval. Moreover, assume that
E sup0≤t <T c0 X Xt < +∞ for some c0 > 0, where we define
D
TDc X := inf t ≥ 0 : sup0≤s≤t Xs − Xt > c ,
ξcU := sup0≤s<t <TDc X (Xt − Xs − c )+ ,
θcU := ETDc X
ηcU := EξcU .
If for
χU (c ) := θcU /ηcU
and for any u > 0, P ξcU ≤ u /χU (c ) /θcU → 1 as c → 0+, then we
have the following convergence
χU (c ) TVc (X , ·) ⇒ 2 · Id .
Rafał M. Łochowski
Truncated variation
Osaka 2015
37 / 51
Lévy processes, cont.
Theorem (LP2)
Let Xt , t ≥ 0, be a Lévy process which has infinite total variation and is
no monotonic on any non-degenerate interval. Moreover, assume that
E sup0≤t <T c0 X Xt < +∞ for some c0 > 0, where we define
D
TUc X := inf {t ≥ 0 : Xt − inf0≤s≤t Xs > c } ,
Rafał M. Łochowski
Truncated variation
θcD := ETDc X
Osaka 2015
38 / 51
Lévy processes, cont.
Theorem (LP2)
Let Xt , t ≥ 0, be a Lévy process which has infinite total variation and is
no monotonic on any non-degenerate interval. Moreover, assume that
E sup0≤t <T c0 X Xt < +∞ for some c0 > 0, where we define
D
TUc X := inf {t ≥ 0 : Xt − inf0≤s≤t Xs > c } ,
ξcD := sup0≤s<t <TUc X (Xs − Xt − c )+ ,
Rafał M. Łochowski
Truncated variation
θcD := ETDc X
ηcD := EξcD .
Osaka 2015
38 / 51
Lévy processes, cont.
Theorem (LP2)
Let Xt , t ≥ 0, be a Lévy process which has infinite total variation and is
no monotonic on any non-degenerate interval. Moreover, assume that
E sup0≤t <T c0 X Xt < +∞ for some c0 > 0, where we define
D
TUc X := inf {t ≥ 0 : Xt − inf0≤s≤t Xs > c } ,
ξcD := sup0≤s<t <TUc X (Xs − Xt − c )+ ,
θcD := ETDc X
ηcD := EξcD .
If for
χD (c ) := θcD /ηcD
and for any u > 0, P (ξcD ≤ u /χD (c )) /θcD → 1 as c → 0+, then we
have the following convergence
χD (c ) TVc (X , ·) ⇒ 2 · Id .
Rafał M. Łochowski
Truncated variation
Osaka 2015
38 / 51
Consequence of Theorem M1 and Theorem SsP
Corollary (S)
Let Xt , t ≥ 0, be a self-similar càdlàg process as in Theorem SsP and
f : R → R be a continuous function, then
ˆ
ˆ
c
1/β−1
nca (X , ·)f
(a) da → C
·
f (Xt − ) dt ,
0
R
where the constant C is the same as in Theorem SsP.
Rafał M. Łochowski
Truncated variation
Osaka 2015
39 / 51
Consequence of Theorem M2 and Theorems LP1,
LP2
Corollary (L)
Let Xt , t ≥ 0, be a Lévy process as in Theorem L1. If the assumptions
of Theorem L1 are satisfied then
ˆ
ˆ
nca (X , ·)f
χU (c )
·
(a) da ⇒ 2
f (Xt − ) dt .
0
R
An analogous convergence, namely
ˆ
ˆ
nca (X , ·)f
χD (c )
(a) da ⇒ 2
·
f (Xt − ) dt ,
0
R
holds when the assumptions of Theorem L2 are satisfied.
Rafał M. Łochowski
Truncated variation
Osaka 2015
40 / 51
More specific case - spectrally assymetric
processes with ”almost” α-stable jumps
Theorem
Let Xt , t ≥ 0, be a Lévy process without Brownian component, with the
Lévy measure Π such that
Π(dx ) =
L(x )
(−x )1+α
1x <0 dx
for α ∈ (1; 2) and some Borel-measurable function
α(α−1)
α−1
L : (−∞; 0) → (0; +∞) , slowly varying at 0. Then χD (c ) ∼ Γ(2−α) Lc(−c )
and
α (α − 1) c α−1
TVc (X , ·) ⇒ 2 · Id .
Γ (2 − α) L (−c )
Rafał M. Łochowski
Truncated variation
Osaka 2015
41 / 51
A remark on local times
The most common definition of the local times L = Lat , a ∈ R, t ≥ 0, of a
given process Xt , t ≥ 0, is as the Radon-Nikodym derivative of the
occupation measure of X with respect to the Lebesgue measure in R;
for every Borel measurable function f : R → R and t > 0,
ˆ
ˆ
t
f (a) Lat da.
f (Xs ) ds =
0
Rafał M. Łochowski
R
Truncated variation
Osaka 2015
42 / 51
A remark on local times
The most common definition of the local times L = Lat , a ∈ R, t ≥ 0, of a
given process Xt , t ≥ 0, is as the Radon-Nikodym derivative of the
occupation measure of X with respect to the Lebesgue measure in R;
for every Borel measurable function f : R → R and t > 0,
ˆ
ˆ
t
f (a) Lat da.
f (Xs ) ds =
0
R
Notice that for any càdlàg process Xt , t ≥ 0, and continuous f
ˆ
ˆ
·
·
f (Xt − ) dt =
0
f (Xt ) dt .
0
Thus, in view of Corollary S and Corollary L we have that the natural
candidates for the local times Lat for a self-similar or a Lévy process X
are the limits (if they exist)
1
1
χU (c ) nca (X , t ) or
χD (c ) nca (X , t ).
C −1 c 1/β−1 nca (X , t ),
2
2
Rafał M. Łochowski
Truncated variation
Osaka 2015
42 / 51
Second order convergence of the truncated
variation of strictly α-stable processes
Let Xt , t ≥ 0, be strictly α-stable process with the characteristic
exponent
ΨX (θ) = C0 |θ|α 1 − i γ tan
πα
2
sgnθ ,
(12)
where α ∈ (1; 2) is the index, C0 > 0 is the scale parameter and
γ ∈ [−1; 1] is the skewness parameter. Define
A := lim E TV1 (X , [0; N + 1]) − TV1 (X , [0; N ]) .
N →+∞
(it is possible to prove that this limit exists) and
Ttc := TVc (X , [0, t ]) − c 1−α A · t .
Rafał M. Łochowski
Truncated variation
Osaka 2015
43 / 51
Second order convergence of the truncated
variation of strictly α-stable processes, cont.
Theorem (SecondOrder)
Let α ∈ (1; 2) and Xt , t ≥ 0, be strictly α-stable process with the
characteristic exponent given by formula (12), then
T c =⇒ L1 + L2 ,
where L1 and L2 are two independent, spectrally positive processes
such that X = L1 − L2 and L1 + L2 is strictly α-stable, spectrally positive
process with the characteristic exponent given by formula
α
ΨL1 +L2 (θ) = C0 |θ|
Rafał M. Łochowski
1 − i tan
Truncated variation
πα
2
sgnθ .
Osaka 2015
44 / 51
Second order convergence of the truncated
variation of strictly 1-stable processes
Let Xt , t ≥ 0, be strictly 1-stable process with the characteristic
exponent
ΨX (θ) = C0 |θ| + i ηθ,
(13)
with the scale parameter C0 > 0 and the drift η ∈ R. (The characterisitc
exponent of a strictly 1-stable process is necessarily of this form.) Let
us set
B = lim E TV1 (X , [0; N + 1]) − TV1 (X , [0; N ]) − TV (Y , [0; N ]) ,
N →+∞
where Y = ∑N <s≤N +1 |Xs − Xs− | 1|Xs −Xs− |≥1 and
2
Ttc := TVc (X , [0, t ]) − C0 log c −1 · t − B · t .
π
Rafał M. Łochowski
Truncated variation
Osaka 2015
45 / 51
Second order convergence of the truncated
variation of strictly 1-stable processes, cont.
Theorem (SecondOrder1)
Let Xt , t ≥ 0, be strictly 1-stable process with the characteristic
exponent given by formula (13), then
T c =⇒ M 1 + M 2 ,
where M 1 , M 2 are two independent, spectrally positive processes such
that X = M 1 − M 2 and M 1 + M 2 is 1-stable process with the
characteristic exponent given by formula
2 ( 1 − C)
ΨM 1 +M 2 (θ) = C0 |θ| 1 + i sgn (θ) log |θ| − i
C0 θ,
π
π
2
where C = Γ0 (1) ≈ 0.577 is the Euler-Mascheroni constant.
Rafał M. Łochowski
Truncated variation
Osaka 2015
46 / 51
Second order convergences for numbers of
segment crossings
The immediate consequences of Theorem SecondOrder,
SecondOrder1 and equality (10) is the second order convergence for
the integrated numbers of segment crossings:
if X is strictly α-stable (α ∈ (1; 2)):
ˆ
nc (X , t ) dy − c 1−α A · t =⇒ L1 + L2
y
R
and if X is strictly 1-stable:
ˆ
R
Rafał M. Łochowski
2
y
nc (X , t ) dy − C0 log c −1 · t − B · t =⇒ M 1 + M 2 .
π
Truncated variation
Osaka 2015
47 / 51
Open questions
Naturally, the next step would be the investigation of the second order
convergence for the integrated numbers of segment crossings with
respect to the measure f (y )dy:
ˆ
y
nc (X , t ) f (y )dy .
R
Why it may be interesting?
Rafał M. Łochowski
Truncated variation
Osaka 2015
48 / 51
Open questions
Naturally, the next step would be the investigation of the second order
convergence for the integrated numbers of segment crossings with
respect to the measure f (y )dy:
ˆ
y
nc (X , t ) f (y )dy .
R
Why it may be interesting?
´
y
1
The integral R nc (X , t ) f (y )dy may reveal much stronger
y
concentration than nc (X , t ) for given y ∈ R.
2
Investigation
together with R nc (X , t ) f (y )dy integrals of the form
´ y
y
R dc (X , t ) f (y )dy , where dc (X , t ) is the number of
downcrossings of X from above the level y + c to the level y till
time t , may reveal interesting correction terms.
´
Rafał M. Łochowski
y
Truncated variation
Osaka 2015
48 / 51
Some references
[F2010] M. Fukasawa, Central limit theorem for the realized volatility
based on tick time sampling. Fin. Stoch. 14:209–233, 2010.
[Kasahara, 1980] Y. Kasahara. On Lévy’s downcrossing theorem. Proc.
Japan Acad. Ser. A Math. Sci., 56:455–458, 1980.
[LG2014] R. M. Łochowski and R. Ghomrasni. Integral and local limit
theorems for numbers of level crossings for diffusions and the Skorohod
problem. Electron. J. Probab. 19(10):1–33, 2014.
[LM2013] R. M. Łochowski and P. Miłoś. On truncated variation, upward
truncated variation and downward truncated variation for diffusions.
Stochastic Process. Appl. 123:446-474.
[LM2014] R. M. Łochowski and P. Miłoś. Limit theorems for the
truncated variation and for numbers of interval crossings of Lévy and
self-similar processes. preprint, available from the web page
www.akson.sgh.waw.pl\ ∼rlocho
Rafał M. Łochowski
Truncated variation
Osaka 2015
49 / 51
Some references, cont.
[L2014] R. M. Łochowski. On the existence of the Riemann-stieltjes
integral. Preprint arXiv:1403.5413, 2014.
[T1972] S. J. Taylor. Exact asymptotic estimates of Brownian path
variation. Duke Math. J., 39(2):219–241, 1972.
[Young, 1936] L. C. Young. An inequality of the Hölder type, connected
with Stieltjes integration. Acta Math., 67(1):251–282, 1936.
Rafał M. Łochowski
Truncated variation
Osaka 2015
50 / 51
Thank you!
Rafał M. Łochowski
Truncated variation
Osaka 2015
51 / 51