Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
The Restricted Three-Body Problem
M1, M2 are both big; m is small (in comparison); all masses are in the same plane. Example:
Earth, Moon, and space station.
If we neglect the small m: M1 and M2 will orbit each other in circular or elliptical orbits, or pass
each other in parabolic or hyperbolic orbits. Let's consider the easiest case: circular orbits. If
we consider the 2 body system from the R,r coordinate system, and if we neglect any external
forces (such as from the sun), then Newton's Second Law gives ΣF = ma which becomes
GM1M2/L² = μ(²L)
(Eq. 1)
(where the scalar L is the separation of the two big masses, μ is the reduced mass: μ =
M1M2/[M1+M2] , and ²L is the circular acceleration). {See section 4-7 in Symon and/or the
notes from PHYS 380, Part 3, section on 2 body collisions: Rr coordinates.}
From this we get the angular speed of the two masses as they orbit one another:
= [(M1+M2)G/L3] .
(Eq. 2)
This suggests that if we transform to a rotating coordinate system that has an angular frequency
of , M1 and M2 will be stationary. We can then more easily concentrate on the motion of the
small mass, m, in this (rotating) system.
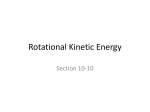
Let's picture the situation from this rotating frame. We locate the center of the frame (the center
of mass) at point C, the origin of our frame. From our definition of the center of mass:
M1x1 + M2x2 = MtXc = 0, and our definition of a: x1 - x2 = L, we have (solving the above two
equations for two unknowns x1 and x2):
x1 = M2L/(M1+M2) and x2 = -M1L/(M1+M2) .
(Eq. 3)
│ F2 m
│
│r F1
──────────M2───────┼────M1───────────────
x2<0 C x1
L = x1 - x2 = x1 + x2
Using Eq. 11 from the Rotating Coordinate Systems section with = 0 , we can write Newton's
Second Law for the small mass, m, as:
ma* = F1m + F2m - {m(r)} - 2m(v*)
(Eq. 4)
where a* is the acceleration of the small mass, m, in the rotating system, and v* is the velocity
of the small mass in the rotating system, and r is the position of the mass in the system (r=r*).
F1m is the gravitational force on m due to M1, and F2m is the gravitational force on m due to M2.
Noting the following : r = xx + yy, so that with
(xx) = ²x(z(zx)) = ²x(zy) = ²x(-x)
and
and
(yy) = ²y(z(zy)) = ²y(z-x) = ²y(-y)
v* = z (vxx + vyy) = vx(y) + vy(-x)
and recall from above (Eq. 2) that ² = (M1+M2)G/L3, we can write Newton's Second Law in the
rotating frame as: m ax = + GM1m(F1·x)/r-r1² + GM2m(F2·x)/r-r2² + m²x + 2mvy,
or
ax = - GM1(x-x1)/[(x-x1)²+y²]3/2 - GM2(x-x2)/[(x-x2)²+y²]3/2 + (M1+M2)Gx/L3 + 2vy (Eq. 5a)
ay = - GM1y/[(x-x1)²+y²]3/2 - GM2y/[(x-x2)²+y²]3/2 + (M1+M2)Gy/L3 - 2vx .
(Eq. 5b)
These are two coupled differential equations (both y and vy in the ax equation, and both x and vx
in the ay equation). The methods to solve these are not easily identified.
However, there is more than one way to attack a problem. We can also try using Conservation
of Energy! As viewed from the rotating frame, there are four forces on the mass, m: the force
of gravity due to M1, the force of gravity due to M2, the centrifugal force (a fictitious force due to
the rotating frame) and the coriolis force (another fictitious force due to the rotating frame).
If we consider the coriolis force, we note that the force is perpendicular to the velocity. This
means that if we try to find a potential energy for this force, we will get zero (since F v and v is
// to dr, then F·dr = 0, and so the potential energy due to this force must be 0!).
If we consider the centrifugal force, we note that the direction of the force is away from the
center, or in the +r direction (see previous page). Since this force is a radial force, it is a central
force and so is a conservative force, and so we can calculate a potential energy for it:
Vc(x,y) = -Fc·dr = -{Fcxdx + Fcydy} = -{m²x dx + m²y dy} = -½m²(x²+y²) (Eq. 6)
and we have the normal potential energies dues to the two gravities:
Vg1 = -GM1m/[(x-x1)²+y²] , and
Vg2 = -GM2m/[(x-x2)²+y²] .
(Eq. 7)
So the Conservation of Energy gives: E = KE + PE, or
½m(vx²+vy²) - GM1m/[(x-x1)²+y²] - GM2m/[(x-x2)²+y²] - ½m{G(M1+M2)/L3}(x²+y²) = E.
(Eq. 8)
In general, this equation does not look easy to solve either.
To find the equilibrium points, we could solve the two component equations of Newton's Second
Law for ax = 0 and ay = 0 with vx = 0 and vy = 0, or we could plot the potential energy
(Vg1 + Vg2 + Vc) over an area of space and look at the equipotential lines. From this we could
then discover the equilibrium points. In your book (Symon, 3rd edition) on page 289 is a sample
plot of this. Note that there are five points (three along the x axis, and two off the axis) that
correspond to equilibrium points. There is a program available from Dr. Holmes and from the
course web page called EPLM2.EXE that can be run that will create a similar diagram to that in
Symon. There are also two excel programs on the course web page that run one dimensional
potential energy plots (one for x and one for y). There is also a simulation program called
3BODY2.EXE on the course web page that uses a numerical program to show the 3 bodies in
mutual orbit.
WRITTEN HOMEWORK PROBLEM #4: (7-21 in Symon).
Consider two identical planets, each of mass, M; and radius, R;
that are separated by a distance, L.
a) Neglecting the orbital motion of the planets about each other,
what speed would you need to escape from one of the planets to
reach the center point between the planets (so you could fall
down to the other planet)?
b) Now include the orbiting motion of the two planets assuming
they are orbiting each other in a circle, and find the speed you
would need.