Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Stray voltage wikipedia , lookup
Alternating current wikipedia , lookup
Control system wikipedia , lookup
Mains electricity wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Commutator (electric) wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Electric motor wikipedia , lookup
Opto-isolator wikipedia , lookup
Dynamometer wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Stepper motor wikipedia , lookup
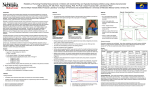
PRODUCTS & SERVICES Rotor angle error correction The effects of rotor angle errors and the correction methods for optimized control of permanent magnet machines are critical factors in electric powertrain development Due to their outstanding power density, permanent magnet synchronous machines play a prominent role in highly integrated applications such as hybrid vehicle powertrains. Accurate knowledge of the rotor angle is necessary to achieve optimal utilization and reliable motor operation. Potential errors in the measurement of the rotor angle can be split between time-varying (gaining error between resolver signals) and time-constant (misalignment of the rotor’s zero position against the angle sensor). Time-varying errors cause a torque ripple that results in increasing noise, less comfort and lower efficiency. Time-constant errors result in lower torque accuracy, which critically affects functional aspects such as ESP, torque vectoring and lower efficiency. The intensity of this issue can be illustrated in the rotating synchronous d/q frame of the PM. In extreme cases where the error of the electrical angle is 90°, an intended pure torque producing q-current is turned into a field-only producing d-current. Thus, no torque is produced at all. Torque deviation for q-currents is proportional to cos(İ) and d-currents is proportional to sin(İ), where İ is the misalignment angle. Consequently, the torque deviation is extremely sensitive against the operating range of the PM. At high q-currents, torque deviation due to an angle error is small (such as an İ = 2° results in a 0.04% torque deviation). At high d-currents the deviation is larger (3.5%). Due to the automotive industry’s significant redundancy and safety requirements, the use of a rotor angular position sensor is practically mandatory. But what are the effects Left: The torque of PM machines Center: PM machine voltage model Below: PM machines are playing a greater role in EV development of errors introduced during serial production and errors due to the overall tolerance chain on the angle? Mechanical tolerances of rotor manufacturing and assembly of the position sensor have an effect on the angle. The corresponding electrical angle deviation is equal to the mechanical deviation multiplied by the number of permanent magnet pole pairs. For example, a mechanical tolerance of 1° of an eight-pole machine results in an electrical angle error of 4° and ~7% torque deviation. Therefore, it is imperative to add an automated calibration of the angular offset at the end of line. Several calibration methods are available, including magnetic alignment of the rotor with DC current; evaluation of the voltage 162 // July 2013 // Electric & Hybrid Vehicle Technology International equation of the d/q system on the running motor; and analysis of the current response of injected test signals. The issue is further complicated as the offset between the position signal and the rotor is affected by the tolerances of the sensor itself and the signal processing. Temperature drift, aging and signal delays may also cause a varying error. The influence of factors such as the propagation time or frequency dependence can be easily determined through simple formulae in the control software. To fully compensate the effect of the remaining factors, an offset auto-tracking function is necessary during normal operation. This may be accomplished via several methods. One potential software approach is through an observer module, which calculates a control loop based on the known system parameters in parallel with the real control path and derives the correction angle from the differences. Another method is based on calculating the electric angle from the current and voltage values in accordance with the EMF method, or by integrating the phase voltage with a flux estimator model. Although real-time calculation of the rotor angle increases the processor load, it substantially improves the control performance, especially at high speeds. This method also helps to reduce the cost of the entire position sensor system. Instead of a high-precision resolver, a more cost-efficient hall sensor configuration could be integrated for monitoring purposes only. For precise torque control the calculated angular value is used. n at Hofer Volker Hartman Powertrain 9335-500 T. +49 931 35 [email protected] E. volker.hartm m.de -e fer ho w. ww W. ER ONLINE READ507 ENQUIRY NO.