Survey
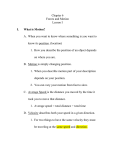
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Exact solutions in general relativity wikipedia , lookup
Derivation of the Navier–Stokes equations wikipedia , lookup
Differential equation wikipedia , lookup
Schwarzschild geodesics wikipedia , lookup
Two-body problem in general relativity wikipedia , lookup
Newton's laws of motion wikipedia , lookup
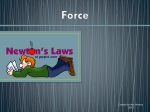
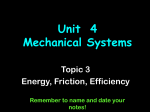
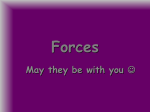
ENOC-2005, Eindhoven, Netherlands, 7-12 August 2005 ENOC-2005, Eindhoven, Netherlands, 7-12 August 2005 ID of contribution 14-093 SIMULATION OF NON-SMOOTH MECHANICAL SYSTEMS WITH MANY UNILATERAL CONSTRAINTS Christian Studer Christoph Glocker Center of Mechanics IMES, ETH Zurich Switzerland [email protected] Center of Mechanics IMES, ETH Zurich Switzerland [email protected] Abstract The two main methods used to simulate non-smooth dynamical systems are the event-driven and the timestepping approach. Systems with many non-smooth constraints can only be handled by time-stepping methods. An example of a simple time-stepping method is the Moreau midpoint rule. Instead of accelerations, velocity updates are calculated. This leads to inclusions describing the discretized system. The inclusions are turned into non-linear equations and solved by an iterative method. This procedure is known as the Augmented Lagrangian Method. In the paper we will treat the following non-smooth constraints: Unilateral contacts, planar friction contacts and spatial friction contacts. Time-stepping methods are very suited for systems with many unilateral constraints. We will show an example of thousand balls falling into a funnel. Because common time-stepping algorithms require small time steps, they are not advisable for systems with just a few non-smooth constraints. A proposal for a time step adjustment is given at the end of the paper. Key words non-smooth dynamical systems, time-stepping, setvalued force laws, event-driven methods, Augmented Lagrangian 1 Introduction A ball falling down to the ground is a simple example of a non-smooth mechanical system with one unilateral contact. In a planar modelling, the ball’s three degrees of freedom are reduced to two when the ball touches the ground. If we additionally consider friction, then the degrees of freedom are reduced to one in the case of sticking. Thus, we have different equations of motion for these different contact configurations. In case of an impact, an impact law must be applied. Event driven methods (Glocker, 1995) simulate non-smooth systems by separating the motion into smooth parts and switching points in which the system 1597 equations are changed. These methods are only suited for systems with few contacts. Time-stepping methods (Glocker and Studer, to appear; Moreau, 1988) calculate velocity updates instead of accelerations. As a consequence, contact behaviour and impact can be treated by the same equations. The non-smooth constraints are modelled by set-valued force laws (Glocker, 2001). Time-stepping methods allow a robust simulation of dynamical systems with many unilateral contacts. As an example we show thousand balls falling down a funnel. Time-stepping methods require an overall fixed small time step to resolve the switching points of the system. Thus mechanical systems with few contacts must also be treated with a very small time step. A way out of this problem is a time step adjustment. The discrete formulation of a non-smooth system can be written as inclusions. These inclusions are turned into non-linear equations, which can be solved by an iterative method. This procedure is known as the Augmented Lagrangian Method (Alart and Curnier, 1991; Leine and Nijmeijer, 2004). 2 Description of a non-smooth system A non-smooth mechanical system without impacts but with n non-smooth constraints can be described by the equation of motion and n set-valued force laws. In case of an impact, an impact equation together with n set-valued impact laws has to be stated (Glocker, 1995; Glocker, 2001; Glocker and Studer, to appear). For simplicity we will exclude an explicit dependency of the dynamical system on time t. 2.1 Equation of motion The equation of motion is u̇ = M−1 (h + n Wi λi ), i=1 q̇ = u. (1) We denote by M = M(q(t)) the positive definite mass matrix, by q = q(t) the generalized coordinates and by u = u(t) the generalized velocities. All bilateral constraints of the system are taken into account by the generalized coordinates q (Lagrange II). The vector h = h(q(t), u(t)) contains all external and gyroscopic forces. The set-valued force laws are considered by a Lagrange I formulation of the equation of motion. We denote the contact forces of the i-th non-smooth constraint by λi = λi (t), the corresponding generalized force directions by Wi = Wi (q(t)). 2.2 Set-valued force laws The set-valued force laws are described by normal cones NC to a set C. The following sets C are used C = R+ 0, C = S2 (a) = {x ∈ R | |x| ≤ a}, C = S3 (a) = {x ∈ R2 | ||x|| ≤ a}. (2) The normal cones for these selected sets C are ½ + 0 if x ∈ R+ 0 /∂R0 + + 0 −R0 if x ∈ ∂R0 ½ 0 if x ∈ S2 (a)/∂S2 (a) NS2 (a) (x) = x R+ 0 |x| if x ∈ ∂S2 (a) ½ 0 if x ∈ S3 (a)/∂S3 (a) NS3 (a) (x) = x R+ 0 ||x|| if x ∈ ∂S3 (a). NR+ (x) = 0 i ∈ PN , i ∈ PN . i ∈ PT 2 . 2.3 Impact equation In case of an impact, the equation of motion (1) is not applicable due to the velocity jump from the pre-impact velocity u− to the post-impact velocity u+ . This jump requires infinitely large contact forces λi . Therefore we integrate the equation of motion over the instantaR t+ neous impact time t− and arrive at the impact equations u+ − u− = M−1 − q − q = 0. (4) (5) i ∈ PT 3 . (6) The scalar ai = ai (t) is the maximum friction force in the i-th friction contact. Note that we treat the unilateral contact j ∈ PN and the corresponding friction contact i ∈ PT 2,3 as two contacts, so ai = µλj . Introducing the maximum friction force ai instead of µλj allows more flexibility. + Note that the set-valued force law of a unilateral contact formulated on velocity level is only applicable if gi = 0. For a planar friction contact, the displacement function gi is the tangential displacement and γi is the relative contact velocity in tangential direction. The corresponding set-valued force law is defined on velocity level −γi = −wi> q̇ ∈ NS2 (ai ) (λi ) −γ i = −Wi> q̇ ∈ NS3 (ai ) (λi ) (3) For each contact we define a displacement function gi = gi (q(t)). The time derivative ġi of this function is γi = γi (q(t), u(t)) almost everywhere. We introduce the set PN of all unilateral contacts, the set PT 2 of all planar friction contacts and the set PT 3 of all spatial friction contacts. The contact i can either be a unilateral contact i ∈ PN , a planar friction contact i ∈ PT 2 or a spatial friction contact i ∈ PT 3 . In the case of a unilateral contact, the function gi is the normal distance between the contact points, and γi is the relative contact velocity in normal direction. The corresponding set-valued force law on displacement and velocity level is −gi ∈ NR+ (λi ) 0 −γi = −wi> q̇ ∈ NR+ (λi ) For spatial friction, the relative tangent contact velocity γ i and the contact forces λi are planar vectors in the tangent plane. They can be described in an arbitrary tangential coordinate system (t1 , t2 ). The set-valued force law on velocity level is n X Wi Λi , i=1 (7) The impulsive forces Λi are obtained by integrating the infinitely large contact forces λi over the instantaneous impact time. Λi = Ai = R t+ − λi dt, t− ai dt. Rtt+ (8) A more detailed explanation can be found in (Glocker and Studer, to appear). Further we have to define impact laws to obtain a relation between the impulsive forces Λi and the relative kinematics. 2.4 Newton’s impact law The Newton impact law for a unilateral contact, a planar friction contact and a spatial friction contact can be expressed in the normal cone formulations: −(γi+ + εi γi− ) ∈ NR+ (Λi ) 0 −(γi+ + εi γi− ) ∈ NS2 (Ai ) (Λi ) −(γ i+ + εi γ − i ) ∈ NS3 (Ai ) (Λi ) i ∈ PN , i ∈ PT 2 , i ∈ PT 3 . (9) The relative contact velocity before the impact is γ − i , the relative contact velocity after the impact is γ + i . The restitution coefficient εi lies between zero and one. Note that the impact law for a unilateral contact is only valid if gi = 0. 1598 2.5 Event-driven methods A common method used to simulate non-smooth systems are the event-driven methods. The idea is to detect all points in time for which the dynamical system changes, for example points for which an impact occurs or for which a friction contact starts to slide. Points for which such events happen are called switching points. The period between these switching points can be described by a common smooth formulation and can be treated classically. Reaching a switching point, the further behaviour of the system is analyzed with the methods of non-smooth mechanics. In case of an impact, the impact equations (7) and the impacts laws (9) are evaluated to obtain the new initial conditions. Analyzing the equation of motion (1) and the set-valued force laws (4-6), the further contact state can be determined and a new smooth formulation for the further integration can be stated. Event driven methods are complicated, because the mechanical system has to be rearranged for the different smooth periods. The treatment of a system with many switching points or even accumulating switching points by event-driven methods is not advisable. define the impulsive forces 1 Rt Λ̂i = tBE λi dt, R tE Âi = tB ai dt. The mass matrix M and the matrix of the generalized force directions Wi are treated to be constant in the time interval [tA , tB ]. By the index M we denote the midpoint time. We define MM = M(qB + ∆t 2 uB ), WM i = Wi (qB + ∆t 2 uB ). uE − uB = qE − qB = R tE M−1 M ( tB R tE tB n X h dt + WM i Λ̂i ), i=1 3.1 Discrete equation of motion The equation of motion (1) is integrated over a finite time interval ∆t = tE − tB : uE − uB = qE − qB = R tE tB R tE tB M−1 (h + n X i=1 Wi λi dt), (13) u dt. The two remaining integrals are approximated as RttBE tB h dt = hM ∆t, u dt = uE +uB 2 (14) ∆t, with hM = h(qB + ∆t uB , uB ). 2 (15) Thus the discrete form of the equation of motion according to Moreau’s midpoint rule is uE = uB + M−1 M (hM ∆t + 3 Discretization In this section we will show one possible discretization of a non-smooth mechanical system. The so called time-stepping methods merge the equation of motion and the impact equation. We will discuss the timestepping method known as Moreau’s midpoint rule (Moreau, 1988). (12) With this assumptions we obtain R tE 2.6 Remarks The formulation of the set-valued force law of a unilateral contact on velocity level is only valid if the contact is closed, that is gi = 0. An open unilateral contact must not be considered. We will call all closed unilateral contacts “active contacts”. The friction contact is defined on velocity level, thus no further restriction has to be made. Note that the consideration of a friction contact whose maximum friction force ai is equal to zero is a waste of computing power. (11) qE = qB + uB +uE 2 ∆t. n X WM i Λ̂i ), i=1 (16) For tE → tB we obtain in case of an impact the impact equation (7), in case of no impact uE = uB and qE = qB . 3.2 Discrete set-valued impulsive force laws In this subsection we will set up the discrete set-valued impulsive force laws. These laws should cover both set-valued force laws (4-6) and impact laws (9). We state −(γEi + εi γBi ) ∈ NR+ (Λ̂i ) 0 −(γEi + εi γBi ) ∈ NS2 (Âi ) (Λ̂i ) −(γ Ei + εi γ Bi ) ∈ NS3 (Âi ) (Λ̂i ) (10) i ∈ PN , i ∈ PT 2 , (17) i ∈ PT 3 , u dt. By the index B we denote the velocity and displacement at tB , the index E stands for the time tE . We 1 Normally only the instantaneous integral (8) is called impulsive force. In this paper we will expand the term ”impulsive force” to the finite integral (10), which is a discretization of (8) 1599 where Λ̂i is the integral of the contact force (11). We detect active unilateral contacts by a discrete form of gi = 0: giM = gi (qB + uA ∆t ) < 0. 2 (18) For tE → tB we obtain in case of an impact the impact − laws (9) by replacing γ Ei with γ + i and γ Bi with γ i . In case of no impact we obtain the set-valued force laws (4-6) on velocity level. This will be shown as follows: According to the mean value theorem we write Z tE lim Λ̂i = lim tE →tB tE →tB λi dt tB (19) = λBi lim ∆t = λBi dt. ∆t→0 Using dt > 0 we obtain NR+ (λBi dt) = NR+ (λBi ), 0 0 NS2 (aBi dt) (λBi dt) = NS2 (aBi ) (λBi ), NS3 (aBi dt) (λBi dt) = NS3 (aBi ) (λBi ). (20) we can rearrange the first equation of (16) to γ E + εγ B = GΛ̂ + c. The matrix G and the vector c are > M−1 G = WM M WM , > c = (I + ε)γ B + WM M−1 M hM ∆t. For tE →tB the relative velocity γ Bi is identical to γ Ei j=1 Gij Λ̂j + NR+ (Λ̂i ) 3 −ci i ∈ PN . 0 (28) (21) For a planar friction contact we obtain A multiplication of a cone with a positive scalar does not chance the cone. It holds that 1 NC (λBi ) = NC (λBi ). 1 + εi (27) The matrix ε is a diagonal matrix with the entries εi . The matrix G is positive definite if all active force directions WM i are independent, that means that the active constraints cannot cause an underdetermined system in any contact configuration. Otherwise, the matrix G is only positive semidefinite. The diagonal entries of G are larger than zero because the mass matrix MM is assumed to be positive definite. The equation (26) merged with the discrete set-valued impulsive force laws (17) gives n inclusions describing the n individual contacts. The inclusion for a unilateral contact is n X γ Ei + εi γ Bi = (1 + εi )γ Bi . (26) n X Gij Λ̂j + NS2 (Âi ) (Λ̂i ) 3 −ci i ∈ PT 2 . (29) j=1 (22) A spatial friction contact i ∈ PT 3 is described by with the nonnegative restitution coefficient εi ∈ [0, 1]. Thus, for tE → tB and no impact, the set-valued impulsive force laws (17) become n X Gij Λ̂j + NS3 (ai ) (Λ̂i ) 3 −ci i ∈ PT 3 . (30) j=1 −γBi ∈ NR+ (λBi ) 0 −γBi ∈ NS2 (aBi ) (λBi ) −γ Bi ∈ NS3 (aBi ) (λBi ) i ∈ PN , i ∈ PT 2 , i ∈ PT 3 . (23) By stating the appropriate inclusion for each contact, the system is completely described. The criterion for the detection of an active unilateral contact (18) is 3.4 Algorithm The time-stepping method can be stated as follows (Moreau, 1988) gBi = gi (qB ) < 0. (24) (i) Calculate the position The laws (23) and (24) are the set-valued force laws (4-6) defined on velocity level. 3.3 Time-stepping inclusions By defining global vectors of all contact velocities, impulsive forces and contact force directions ¢ ¡ > > , γ = γ> 1 · · · γn ³ ´> > > Λ̂ = Λ̂1 · · · Λ̂n , ¡ ¢ WM = WM 1 · · · WM n , qM = qB + uB ∆t . 2 (31) (ii) Define all closed unilateral contacts i i ∈ {j ∈ PN | gj (qM ) < 0} (32) as active contacts on velocity level. Because the physical level of the friction contacts is the velocity level, all friction contacts can be viewed as (25) 1600 (iii) (iv) (v) (vi) active. Note that considering a friction contact i ∈ PT 2,3 belonging to a non-active unilateral contact j ∈ PN is a waist of computing power because the maximum impulsive friction force Âi = µΛ̂j is zero. Such a friction contact can be regarded as non-active friction contact. Set up the generalized force directions WM i (12) for all active contacts. Calculate the vector hM (15) and MM (12). Calculate G and c according to (27). Solve the time-stepping inclusions (28-30). As result we obtain the impulsive forces Λ̂ and thus the velocities uE (16). Calculate the end position qE qE = qB + ∆t uE + uB . (33) ∆t = qM + uE 2 2 3.5 Remarks The main idea of the time-stepping methods involves using the impulsive forces Λ̂i instead of the forces λi . This enables us to treat impacts and smooth motion by the same discrete equations. Instead of accelerations, velocity updates are calculated. Time Stepping methods can be viewed as event-driven methods in which the switching points are not instantaneous but have a finite “time-length”. In addition, timestepping methods can change their contact state automatically, and no different equations of motion have to be formulated for the different periods between the switching points. The time step should be chosen very small to resolve the switching points. Systems with many non-smooth constraints switch permanently and require an over-all small time step, thus a fixed timestepping method is appropriate. However, systems with few non-smooth constraints may have long periods in which no switching point occurs. In this case, the use of a fixed small time step is a waist of computing power. This problem can be bypassed by using a variable time step. The combination of the equation of motion (1) and the set-valued force laws (4-6) forms a differential algebraic system (DAE). The set-valued force laws on displacement level cause an index 3 DAE, the formulation on velocity level results in an index 2 DAE. The use of the impulsive forces Λ̂i makes the solution of this index 2 DAE possible. Various time-stepping methods (Funk, 2004; Jean, 1999; Stiegelmeyr, 2001) differ in the approximation of the integrals (14). Also the discrete set-valued impulsive force laws (17) are formulated in a different manner. The formulation of the set-valued impulsive force laws on velocity level allows for a good consolidation of impact laws (9) and set-valued force laws (46). A disadvantage is the drift in the unilateral contacts caused by numerical errors. A formulation of a unilateral contact on displacement level eliminates the drift problem, but the consideration of the impact law with ε > 0 becomes cumbersome. The formulation on dis- placement level results in an index 3 DAE, whose solution is a problem for tE → tB . Some time-stepping methods merge velocity and displacement level. 4 Solving the time-stepping inclusions The time-stepping inclusions (28-30) can be solved in various ways. One way is to transform the inclusions in linear and non-linear complementarity problems (Glocker, 1995; Glocker and Studer, to appear; Cottle and Pang, 1992). We will focus on another method which transforms the inclusions into non-linear equations. This can be interpreted as stating the adequate conditions for the saddle point of the Augmented Lagrangian, as exact regularization of the set-valued impulsive force laws or as successive solutions of the individual inclusions (Alart and Curnier, 1991; Bertsekas, 1982; Leine and Nijmeijer, 2004; Moreau, 1988). We will focus on the last interpretation. For r > 0, the simple inclusion (Paoli and Schatzman, 2002) x + rNC (x) 3 b (34) x = proxC (b). (35) is equal to The proxC function describes the projection on the set C, that is the point x = proxC (b) is the nearest point to b in the set C (proximal point). The proxC functions for the selected sets C are: ½ b if b ∈ R+ 0 0 0 if b ∈ / R+ 0 ½ b if b ∈ S2 (a) proxS2 (a) (b) = b if b ∈ / S2 (a) a |b| ½ b if b ∈ S3 (a) proxS3 (a) (b) = b if b ∈ / S3 (a). a kbk proxR+ (b) = (36) The relation between the inclusion (34) and the nonlinear equation (35) can be shown by writing the normal cone NC (x) as a subdifferential of the indicator function ΨC (x). The inclusion (34) becomes 0∈ 1 (x − b) + ∂ΨC (x). r (37) Integrating (37) leads to argmin x 1 ||x − b||2 + ΨC (x) 2r ∀x. (38) This unconstrained optimization problem can be turned into a constrained optimization problem argmin x 1601 1 ||x − b||2 2r ∀x ∈ C. (39) The solution x of this constrained optimization problem (39) is the nearest point to b in the set C. The relation between (34) and (35) can also be interpreted as the solution of one single non-smooth constraint. With the help of (34) and (35), the time-stepping inclusions (28-30) can be turned into non-linear equations. The inclusion for a unilateral contact (28) can be written as − n X Gij Λ̂j − ci ∈ Gii Λ̂i + NR+ (Λ̂i ). 0 j=1 j6=i (40) Since αi = Gii > 0 is a scalar, we obtain Λ̂i = proxR+ (Ji (Λ̂)), 0 n ³X ´ Gij Λ̂j + ci . Ji (Λ̂) = − α1i (41) j=1 j6=i The impulsive force Λ̂i appears only on the left hand side of (41). Thus it can be computed instantaneously if G all other forces Λ̂j are known. The quotient αiji shows the direct influence of the j-th contact on the unilateral contact i. The non-linear equation for a planar friction contact (29) follows when replacing the set R+ 0 by S2 (ai ) in the non-linear equation (41). The inclusion of a spatial friction constraint (30) can be reformulated as − n X Gij Λ̂j − ci ∈ Gii Λ̂i + NS3 (Âi ) (Λ̂i ). (42) j=1 j6=i Since the matrix Gii is not a scalar, it has to be splitted into a scalar αi > 0 and a remaining part B Gii = αi I + B. (43) Note that the impulsive force Λ̂i appears on both sides of the equation (45). The spatial friction contact i can not be solved by one projection if all other impulsive contact forces Λ̂j are known. The remainder matrix B depends on the choice of the the tangential unit vectors t1 and t2 of the spatial friction contact. 4.1 Solving the non-linear equations The non-smooth dynamical system is thus described by n non-linear equations (41) and (45). Because the non-linear equation of a planar friction contact is very similar to the non-linear equation of a unilateral contact, we will discuss only the unilateral contact and the spatial friction contact. The non-linear equations (41) and (45) can be solved by a Newton-Raphson iteration method (Alart and Curnier, 1991) or any other fix point iteration method. We will focus on a Jacobi and a Gauss Seidel like iteration method (Bronstein and Semendjajew, 1995; Schwarz, 1997). 4.1.1 Jprox method One possible iterative instruction to solve the non-linear equations (41) and (45) is ν Λ̂ν+1 = proxR+ (Ji (Λ̂ )) i i ∈ PN , 0 ν+1 Λ̂i ν = proxS3 (Âi ) (Ji (Λ̂ )) ν+1 − n X j=1 j6=i (44) ∈ αi Λ̂i + NS3 (Âi ) (Λ̂i ). ν+1 ν ν+1 ν+1 Λ̂i−1 is already known. n X Gij Λ̂j − ci + ri Λ̂i ∈ i=1 Λ̂i j=1 j6=i does not make use of 4.1.2 JORprox method The Jprox method (46) is altered in a sense that the underlying linear equation system (47) is solved by the Jacobi relaxation method (JOR). Therefore we rearrange the inclusion of a unilateral contact (28) by adding ri Λ̂i on both sides: − ∈ (45) (47) The instruction Λ̂i = Ji (Λ̂ ) can be viewed as a Jacobi-relaxation instruction for two components h and (h + 1) at once. Thus the instruction (46) is the Jacobi method combined with a projection. We will call this method Jprox method, because it combines the Jacobi method (J method) with the prox function. The Jprox method solves the individual contacts by the asν sumption that all other impulsive contact forces Λ̂j are Using (35) we obtain the non-linear equation = proxS3 (Âi ) (Ji (Λ̂)), n ³X ´ Gij Λ̂j + ci + BΛ̂i . Ji (Λ̂) = − α1i ν GΛ̂ + c = 0. the fact that Gij Λ̂j − ci − BΛ̂i ∈ (46) Note that the instruction Λ̂i = Ji (Λ̂ ) is the Jacobi iteration instruction to solve the linear System known. The calculation of Λ̂i The inclusion (30) becomes i ∈ PT 3 . (48) ri Λ̂i + NR+ (Λ̂i ). 0 The same can be done for the inclusion of a spatial friction contact (30). 1602 The corresponding non-linear equation for a unilateral contact i ∈ PN is = proxR+ (JORi (Λ̂)), 0 n X ν JORi (Λ̂) = Λ̂i − ri ( Gij Λ̂j + ci ). Λ̂i (49) j=1 i-th constraint. In case of a spatial friction constraint, h is chosen in a way that ri becomes minimal. If the diagonal elements in G predominate, then the criterion (52) and (53) become similar. 4.1.3 SORprox method An iterative instruction based on the Gauss Seidel relaxation method (SOR) is ν+1 For the spatial friction contact i ∈ PT 3 we obtain = proxS3 (Âi ) (JORi (Λ̂)), n X ν JORi (Λ̂) = Λ̂i − ri ( Gij Λ̂j + ci ). ν+1 Λ̂i = Λ̂i (50) j=1 The corresponding iterative instructions are ν Λ̂ν+1 = proxR+ (JORi (Λ̂ )) i ν+1 Λ̂i 0 i ∈ PN , ν = proxS3 (Âi ) (JORi (Λ̂ )) i ∈ PT 3 . (51) 1 . Gii 1 m X (52) . ν+1 i ∈ PN , ν proxS3 (Âi ) (SOR(Λ̂ , Λ̂ )) i ∈ PT 3 , (54) = Λ̂νi ν+1 ν , Λ̂ ) = j<i n X X ν+1 ν − ri ( Gij Λ̂j + Gij Λ̂j + ci ), j=1 j=i (55) Using this ri we arrive at the original Jprox method. In case of a spatial friction contact Gii is a matrix and the largest of the two diagonal elements can be chosen. Note that if the matrix G is not strictly diagonal dominant, then convergence cannot be guaranteed. For a small ri the iteration might still converge because the Lipschitz constant is still near to one. A good empiric criterion is ri = 0 with the iterative instructions of the Gauss Seidel relaxation method for a linear system (47): SOR(Λ̂ We will call the iterative instructions (51) the JORprox method. The JORprox method consists of a JOR iteration combined with a projection. The factor ri contains the relaxation parameter. Note that the instruction in (50) requires one ri , although two components are iterated at once. That means that the relaxation parameters for both components are not independent. It can be shown that in case of dry friction the JORprox iteration converges if the underlying JOR method does. Convergence of the JOR method can only be guaranteed if the matrix G is strictly diagonal dominant. An optimal convergence can be achieved by minimizing the Lipschitz constant. Using the maximum norm we obtain an optimal ri ri = ν Λ̂ν+1 = proxR+ (SOR(Λ̂ , Λ̂ )) i (53) |Ghk | k=1 The index m denotes the dimension of the matrix G which is not equal to the number of constraints n because the spatial friction contacts require two rows in G. The index h denotes the row in G belonging to the ν+1 SOR(Λ̂ ν = Λ̂i − ri ( ν , Λ̂ ) = j<i n X X ν+1 ν Gij Λ̂j + Gij Λ̂j + ci ). j=1 j=i We will call the method (54) the SORprox method. Different to the JORprox method, the calculation of ν+1 ν+1 Λ̂i makes use of the fact that Λ̂i−1 is already known. Convergence of the SOR method can be guaranteed for positive definite matrices G. It is presumable that for dry friction the SORprox method has the same convergence criterion as the SOR method, that means the linear part (55) will determine convergence. 4.2 Remarks An important aspect is the uniqueness of the solution of the non-linear equations (41) and (45). Consider a system with two unilateral contacts Λ̂1 = proxR+ (− G111 (G12 Λ̂2 + c1 )), 0 Λ̂2 = proxR+ (− G122 (G21 Λ̂1 + c2 )). (56) 0 We assume that the contact force directions w1 and w2 are not independent, thus the matrix G is only positive semidefinite and not positive definite. If both proxR+ 0 in (56) do not project on the set R+ 0 , then the system (56) is underdetermined. The impulsive forces Λ̂ cannot be determined uniquely. Note that in this case the motion is in many cases unique. It is therefore sufficient to find one possible solution for the impulsive forces. The non-unique impulsive forces represent an arbitrary inner tension state. An non-regular matrix G does not necessarily induce non-unique impulsive forces. If, for example the 1603 Figure 1. Thousand balls falling through a funnel. Simulation of about half a million possible unilateral and friction contacts with Moreau’s midpoint rule. The time step is fixed and small. The restitution and friction coefficients are: εN =0.3, εT =0, µ=0.3. proxR+ from the second contact projects on its set R+ 0, 0 then the system (56) has a unique solution. Thus, if active contacts can act on the system in a way that it becomes underdetermined, then the matrix G is positive semidefinite and not positive definite. The matrix G is not invertible anymore. The solution for the impulsive forces Λ̂ might be non-unique, but not necessarily, because the proxC functions may eliminate dependent rows in G. As a consequence on the non-regularity of G, one can not expect general convergence of the SORprox method. 5 Systems with many unilateral constraints An example of a system with many unilateral contacts is shown in figure 1. Thousand balls are thrown in a funnel. About half a million possible unilateral contacts and half a million possible friction contacts are modelled. It is nearly impossible to simulate this problem with event-driven methods because there are so many possible contact configurations and switching points. Note that event-driven methods cannot treat accumulative switching points. An example of an accumulation point is a ball falling on the ground. There will be infinitely many impacts in a finite time. An event-driven method detects all these infinitely many impacts and is therefore not able to pass the accumulation point. A time-stepping method with a small fixed time step ∆t is however suitable to handle such problems. Because there are so many switching points, an overall small time step is reasonable. The size of the time step cor- 1604 Figure 2. Moreau’s midpoint time-stepping method with variable step length tested on the woodpecker toy. The switching points are plotted as solid circles. The switching incidents are shown in table 1. t respond to the resolution of the switching points. The algorithm is very robust. The result is however not very accurate. However, for large dissipative systems the accuracy is not very important. We are more interested in the overall behaviour of the system, but not in the particular motion of one single ball. 6 System with few unilateral constraints A time-stepping method with a fixed time step causes unessential computional effort if it is used to simulate systems with a few non-smooth constraints. Because for such systems not only the overall behaviour is of interest, the simulation has to be much more accurate. Thus, the time step has to be chosen very small to resolve the switching points. The smooth part of the motion must also be integrated with this small time step, which is a waste of computing power. We suggest a time-stepping method with variable step length. The system is described by the non-linear equations (41) and (45). If a unilateral contact is closed, then the proxR+ function does not project onto the set 0 R+ 0 . An open unilateral contact can be detected by a proxR+ that does project on the set R+ 0 . In general, a 0 switching point of a contact can be detected by analyzing the behaviour of the proxC function. If a proxC switching point Figure 3. Localization of a switching point. By comparing the behaviour of the proxC functions in consecutive time steps, a switching point can be detected. A time step for which the proxC function does “not project” is plotted dashed, a time step for which the proxC function “project” is plotted solid. If a switching point is localized, then the time step is diminished until a minimal time step ∆tmin is reached. function projects on the set C during the time step t1 and does not project on the set C in the following time step t2 , then a switching point is detected during the time steps t1 and t2 . Of course this is also the case if the proxC function changes from “non-project” to “project”. The time step is diminished and the calculation is redone, until a minimal time step length 1605 is reached. Thus, the switching point is located with nested intervals. The procedure is shown in figure 3. The Moreau midpoint time-stepping method with a variable step length has been tested on the woodpecker toy. The woodpecker toy consists of a pole, a sleeve with a hole that is slightly larger than the diameter of the pole, a spring, and the woodpecker. In operation, the woodpecker moves downwards the pole performing some kind of pitching motion, which is controlled by the sleeve (Glocker and Studer, to appear). The results are shown in figure 2. The time step is diminished if the algorithm detects a switching point or if the integration error becomes to big. The switching points are plotted as solid dark circles. The different switching incidents are shown in table 1. Contact from to Friction contact 2 slip stick Friction contact 2 stick slip Unilateral contact 2 closed open Unilateral contact 3 open closed Unilateral contact 3 closed open Unilateral contact 1 open closed Unilateral contact 1 closed open Unilateral contact 3 open closed Unilateral contact 3 closed open Unilateral contact 2 open closed Unilateral contact 2 closed open Unilateral contact 2 open closed Table 1. The different switching incidents of the woodpecker toy. The corresponding switching points are shown in figure 2. 7 Conclusions Time stepping methods are very suitable to simulate mechanical systems with many non-smooth constraints, as demonstrated in section 5. Small systems with few constraints can be handled by time-stepping methods with a variable time step length. This enables an accurate localization of switching points. An example was given in section 6. For the further development, extrapolation methods should be used to increase the order of the integration during the smooth parts of the motion. The time-stepping inclusions which describe the discrete system are represented by non-linear equations. For each contact, one specific equation which describes the contact behaviour is formulated. By this approach, spatial friction situations can be treated in a compact way. The non-linear equations are solved iteratively by a Jacobi or a Gauss Seidel like procedure. References Alart, P. and A. Curnier (1991). A mixed formulation for frictional contact problems prone to newton like solution methods. Computer Methods in Applied Mechanics and Engineering 92(3), 353–375. Bertsekas, D. P (1982). Constrained optimization and Lagrange multiplier methods. Academic Press. Bronstein, I. N. and K. A. Semendjajew (1995). Taschenbuch der Mathematik. Harri Deutsch. Cottle, R. and W. Pang (1992). The Linear Complementarity Problem. Academic Press Inc. Funk, K. (2004). Simulation eindimensionaler Kontinua mit Unstetigkeiten. Vol. 18/294 of VDIFortschrittberichte Mechanik/Bruchmechanik. VDIVerlag. Glocker, Ch. (1995). Dynamik von Starrkörpersystemen mit Reibung und Stössen. Vol. 18/182 of VDI-Fortschrittberichte Mechanik/Bruchmechanik. VDI-Verlag. Glocker, Ch. (2001). Set-Valued Force Laws – Dynamics of Non-Smooth Systems. Vol. 1 of Lecture Notes in Applied Mechanics. Springer Verlag. Glocker, Ch. and C. Studer (to appear). Formulation and preparation for numerical evaluation of linear complementarity systems in dynamics. Multibody System Dynamics. Jean, M. (1999). The non-smooth contact dynamics method. Computer Methods in Applied Mechanics and Engineering 177(3-4), 235–257. Leine, R. I. and H. Nijmeijer (2004). Dynamics and Bifurcations of Non-smooth Mechanical Systems. Vol. 18 of Lecture Notes in Applied Mechanics. Springer. Moreau, J. J. (1988). Unilateral Contact and Dry Friction in Finite Freedom Dynamics. Vol. 302 of Nonsmooth Mechanics and Applications, CISM Courses and Lectures. Springer. Paoli, L. and M. Schatzman (2002). A numerical scheme for impact problems i: The onedimensional case. Siam Journal on Numerical Analysis 40(2), 702–733. Schwarz, H. R. (1997). Numerische Mathematik. B.G. Teubner. Stiegelmeyr, A. (2001). Zur numerischen Berechnung strukturvarianter Mehrkörpersysteme. Vol. 18/271 of VDI-Fortschrittberichte Mechanik/Bruchmechanik. VDI-Verlag. 1606