Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Electric battery wikipedia , lookup
Transistor–transistor logic wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Schmitt trigger wikipedia , lookup
Operational amplifier wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Power MOSFET wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Rechargeable battery wikipedia , lookup
Voltage regulator wikipedia , lookup
NEMA connector wikipedia , lookup
Surface-mount technology wikipedia , lookup
Surge protector wikipedia , lookup
Power electronics wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Phone connector (audio) wikipedia , lookup
D-subminiature wikipedia , lookup
XLR connector wikipedia , lookup
Opto-isolator wikipedia , lookup
Rectiverter wikipedia , lookup
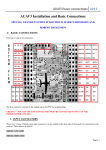
AUAV3 basic connections 2013 AUAV3 Installation and Basic Connections SPECIAL THANKS TO PHILLIP KOCMOUD, MARK WHITEHORN AND ROBERT DICKENSON A/ BASIC CONNECTIONS First take a look at the connectors: The first connector, situated in the middle top is the ICSP for programming. URGENT ! PIN 1 OF THE ICSP CONNECTOR MUST BE CONNECTED TO PIN 1 OF THE PROGRAMMER ( PICkit3 ). 1. INPUT CONNECTORS There are 4 x 3pin, 2.54mm. input male connectors ( in the middle of the fron side of the board ) for connection to the receiver. Their order is as follow : INPUT1 +5V GND INPUT2 RSSI GND Page | 1 AUAV3 basic connections 2013 INPUT3 INPUT4 INPUT5 INPUT6 INPUT7 INPUT8 The RSSI input has a 1:1 resistor divider as the input Vmax for the analog inputs is 3.3V. The connector situated under the inputs is the SPI3 connector with it’s signals – SS3 SCK3 GND. This could be used for any external SPI device. +5V , SDI3 SDO3 2. THERE IS A GROUP OF 3 VERY IMPORTANT CONNECTORS AT THE BOTTOM RIGHT FIRST OF THEM IS THE POWER-CURRENT SENSE-BATTERY VOLTAGE CONNECTOR: CSU (BATTERY VOLTAGE) – measured battery voltage from the ACSP1 CSI (CURRENT SENSING) – measured current from the ACSP1 5PWR (5V POWER SUPPLY) – 5V DC power from the ACSP1 GND Battery voltage sensing and current sensing have 1:1 resistor dividers. Also there is additional voltage 3:1 divider over the ACSP1 ( current and voltage sensor board + 5V3A DC-DC Buck regulator ). Thus, voltages up to 4S could be measured. The current sensor of the ACSP1 can measure currents up to 90A. THE SECOND CONNECTOR IS THE ADDITIONAL POWER SUPPLY CONNECTOR AND BACKUP BATTERY. GND UPS – uninterruptable power source from an external battery as 1S Li-Po or 2x NiCd/NiMH. This could be used as an external second battery for emergency backup. 5PWR (5V POWER SUPPLY) – 5V DC power supply if not using the ACSP1. Could be a 5V BEC. GND THE THIRD CONNECTOR IS THE I2C1 INTERFACE FOR USING WITH EXTERNAL I2C DEVICES. PLEASE NOTE, THE I2C1 CLOCK AND DATA ARE 5V TOLERANT, WHICH MEANS YOU COULD CONNECT EITHER 5V I2C EXTERNAL DEVICES OR 3.3V I2C EXTERNAL DEVICES. WHEN CONNECTING 3.3V I2C DEVICES, PLEASE PAY ATTENTION THAT THE SUPPLIED VOLTAGE IS +5V, WHICH MEANS THE EXTERNAL DEVICE SHOULD HAVE IT’S OWN 3.3V VOLTAGE REGULATOR. SCL1 – I2C1 clock SDA1 – I2C1 data +5V for the external devices with 250mA load current capabilities. Page | 2 AUAV3 basic connections 2013 GND 3. THE THIRD GROUP OF CONNECTORS, SITUATED ABOVE THE INPUTS This group consists of 3 connectors from UARTs – 2 of them are totally optoisolated and one is not. THE FIRST CONNECTOR IS THE NONISOLATED UART3: UART3Tx – UART3 transmit data UART3Rx – UART3 received data +5V is the 5V power for the external devices with 250mA load current capabilities GND THE SECOND CONNECTOR IS THE FIRST OPTOISOLATED UART – OUART1 OUART1Vdd – optoisolated UART1 Vdd – supplied from the external device and should be in the range between +3.3 and 5V OUART1Tx – optoisolated UART1 transmit data OUART1Rx – optoisolated UART1 received data GND THE THIRD CONNECTOR IS THE SECOND OPTOISOLATED UART – OUART2 OUART2Vdd – optoisolated UART2 Vdd – supplied from the external device and should be in the range between +3.3 and 5V OUART2Tx – optoisolated UART2 transmit data OUART2Rx – optoisolated UART2 received data GND The optoisolators used are FOD8012. 4. THE OUTPUT SERVO CONNECTORS The group of servo connectors are situated in the middle left side on the picture. There are 8 servo outputs. Please note that the servo power is disconnected from the main 5V power by a solder blob under the USB connector. The explanations for powering the servos and using this solder blob are explained below. GND Vservo S8 – servo 8 GND Vservo S7 – servo 7 GND Vservo S6 – servo 6 Page | 3 AUAV3 basic connections 2013 GND Vservo S5 – servo 5 GND Vservo S4 – servo 4 GND Vservo S3 – servo 3 GND Vservo S2 – servo 2 GND Vservo S1 – servo 1 PLEASE DO READ CAREFULLY THE SERVO POWER EXPLANATIONS BELOW ( section B )! 5. THE CONNECTOR ABOVE THE SERVO CONNECTORS The connector above servo connectors is the ANALOG INPUTS connector. There are 4 analog inputs as follow: A2 A0 A1 GND +5V A3 Please note all analog inputs have 1:1 resistor dividers + 10nF filter capacitors. The maximum measured voltage can be +6.6V. If you need to measure higher voltages, please do connect an appropriate resistor in series with the input used. 6. THE CONNECTORS UNDER THE SERVO OUTPUTS There are 3 connectors under the servo outputs as follow: THE LEFTMOST CONNECTOR IS THE CAN INTERFACE CANH – CAN bus line high CANL – CAN bus line low +5V is the 5V power for the external CAN devices with 250mA load current capabilities GND Please note there is an integrated CAN transceiver MAX3051 on the board. THE SECOND CONNECTOR IS THE GPS CONNECTOR GPSRx – INPUT – receives data from the GPS GPSTx – OUTPUT – transmits data to the GPS +5V is a 5V power for the GPS with up to 250mA load capabilities GND PLEASE NOTE, THE GPS TxD AND RxD ARE 3.3V COMPATTIBLE. Page | 4 AUAV3 basic connections 2013 REMARK: [ When using the first version of AGPS PA6C MT3339, you have to discard it’s level translator by removing the two 10k resistors, 2N7002 MOSFET and solder the x-x solder blob as shown on the picture below. You can also order the AGPS PA6C MT3339 without this level translator. This level translator had been placed for compatibility with the older autopilots like AUAV1] THE THIRD CONNECTOR IS THE GENERAL PURPOSE DIGITAL I/O CONNECTOR DIG0 – the digital I/O bus 0 DIG1 – the digital I/O bus 1 DIG2 – the digital I/O bus 2 GND PLEASE NOTE THAT THE DIGITAL I/Os ARE NOT 5V TOLERANT, BUT 3.3V, WHICH MEANS IF YOU LIKE TO USE THEM WITH 5V OR HIGHER VOLTAGE POWERED DEVICES, YOU MUST USE AN EXTERNAL RESISTOR DIVIDERS. 7. THE USB CONNECTOR There is a miniUSB connector onboard for bootloading and other future use. B/ POWERING THE BOARD AND USING THE SERVO POWER SOLDER BLOB 1. SEPARATED POWERING BY DEFAULT THE BOARD SHOULD BE POWERED BY THE ACSP1 ( CURRENT-VOLTAGE SENSOR WITH 5V3A DC-DC BUCK ), WHILE THE SERVOS MUST BE POWERED SEPARATELY. IMPORTANT ! DO NOT POWER THE SERVOS FROM THE ACSP1 ! SEE THE EXPLANATIONS BELOW. Page | 5 AUAV3 basic connections 2013 As you could see from the pictures, you have a BATTERY IN and BATTERY OUT sides. BAT-IN and GND is the connection to the battery, while BAT-OUT and GND is the connection to the ESC. You have also a 4x1 2.54mm connector – GND / +5V3A / I / V. The signals are as follow: GND – the GND to the AUAV3; +5V 3A - is the output from the DC-DC Buck for powering the AUAV3; I – is the current output from the current sensor. The full range span is 5V; U – is the voltage output from the ACSP1 for measuring the battery voltage. Range span is 5V. IF YOU DECIDE TO COVER THE ACSP1 WITH A HEAT SHRINKABLE TUBE, DO NOT LOAD IT WITH A CURRENT HIGHER THAN 2A! If you prefer the separated powering, you can power the servos with higher voltages, BUT !!! a/ The solder blob under the USB must NOT be soldered ! b/ The board should be powered either by ACSP1 or by any other 5V BEC; c/ The middle ( power ) servo cable should NOT be disconnected neither from any servo nor from the ESC. In this case, they have just a common GND. Example: If you have 2S battery for servos ( 7.4V ), then DO NOT solder the blob under the USB and just connect the 2S battery (+) cable to the middle pin of the servo connector and (-) to the GND pin of the servo connector over the board. You could use any of the servo connectors for the purpose. 2. POWERING THE BOARD FROM THE SERVO SIDE ONLY Page | 6 AUAV3 basic connections 2013 YOU COULD ALSO POWER THE BOARD WITH AN ESC OR BEC VIA A SERVO CONNECTOR. WHEN POWERING THE BOARD THUS WAY, PLEASE DO NOT POWER IT AGAIN FROM THE FRONT POWER CONNECTORS AND DO SOLDER THE SOLDER BLOB UNDER THE USB CONNECTOR. PLEASE NOTE THAT THE ESC/BEC MUST BE 5V. WHEN POWERING THE BOARD FROM A SERVO CONNECTOR, DO NOT USE HIGH VOLTAGE ESCS/BECS, BUT 5V ONES, BECAUSE THE PERIPHERAL 5V DEVICES ARE POWERED FROM THE SAME 5V POWER SOURCE! HIGH VOLTAGE ESC/BEC WILL DAMAGE THE PERIPHERAL DEVICES AND THE LOW DROPOUT VOLTAGE REGULATOR! C/ USING A BATTERY BACKUP AUAV3 offers the possibility of using an additional battery backup. To use this feature, you can use an additional 1S LiPo or 4xNiCd/NiMH battery. Connect it to the UPS connector thus way – (BAT +) to the UPS connector pin and (BAT-) to the GND pin. NOTE, THE EXTERNAL ADDITIONAL BATTERY VOLTAGE MUST BE <= 5V! D/ MAGMETOMETER ( COMPASS ) ENABLE On the backside of the board you can see a solder blob with a label MAGEN. This solder blob enables the onboard HMC5883 compass. If you like to use it, just solder the blob. F/ IMPORTANT NOTES…..to be continued….. Page | 7