Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
History of electric power transmission wikipedia , lookup
Alternating current wikipedia , lookup
Buck converter wikipedia , lookup
Voltage optimisation wikipedia , lookup
Mains electricity wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Embedded system wikipedia , lookup
Finger Print Based Security System
1. INTRODUCTION
1.1 Objective
Nowadays accurate personal identification is becoming more and more important.
Usual means (smart cards, passwords…) have shown their limits (falsification, loss…).
Biometrics (i.e. analysis of personal biological characteristics) can bring a satisfying answer
to those latter problems. Currently fingerprint recognition is the most widely used technique
for personal identification. Fingerprints are made up of locally parallel ridges with singular
points (minutiae), and they constitute a unique permanent universal pattern. The use of ink
and paper to get an image from a finger was used for a long time, but technological advances
have enabled to automate the acquisition stage by means of solid-state sensors. These sensors
exploit different techniques to acquire the image (pressure, electrical field, temperature…)
and require a static (matrix sensor) or mobile finger position (sweeping mode sensor).
Our project is developed to provide security for a Organization. In this project the
fingerprint sensor sense the thumb impression of the corresponding person and that image
will be compared with registered image, if the both images are unique, then the finger print
device activates particular task like access control to a secured area, identification of the
employee etc. The project contains 2 modes, the first one is master mode and the second is
user mode. The master mode is used to register the new user and gives the mode of
authorization. The master mode has the ability to create and delete the users. The user mode
is an ordinary mode used for the authentication of the employees. In user mode of
authorization, creation and deletion of a user cannot be performed.
The Master mode operations are done directly through interfacing the FM10
(Finger Print Module) to the COM PORT of the computer. The application program is
developed using java API in Swings. The Java communication API is used for
communicating with the Fingerprint device. The employee details along with biometric
information database is stored in the flash memory of the Fingerprint module. The
Microcontroller 89S52 is programmed to operate under user mode. Microcontroller is
programmed using C51 cross compiler. Fingerprint image is scanned by the fingerprint
device. If the scanned image matches with the registered image then Microcontroller sends
the authorized persons Id to the computer when the person enters and leaves the organization.
Finger Print Based Security System
By this daily attendance of employees, many employee records are maintained. The
employee records are stored in the database.
1.2 Principle of operation
When a finger is kept at the finger print reader, it will give the information
accordingly to microcontroller by sending appropriate commands to the reader and which is
displayed on the LCD. If the information matches with the one within the device then the DC
motor interfaced to the microcontroller responds accordingly. And if the information
provided by the user is incorrect or mismatch in finger prints is detected then access is
denied. Finger print reader and the microcontroller unit are connected using serial interface.
Embedded Systems
Embedded System is a combination of hardware and software used to achieve a
single specific task. An embedded system is a microcontroller-based, software driven,
reliable, real-time control system, autonomous, or human or network interactive, operating on
diverse physical variables and in diverse environments and sold into a competitive and cost
conscious market.
An embedded system is a special-purpose computer system designed to perform a
dedicated function. Unlike a general-purpose computer, such as a personal computer, an
embedded system performs one or a few pre-defined tasks, usually with very specific
requirements, and often includes task-specific hardware and mechanical parts not usually
found in a general-purpose computer. Since the system is dedicated to specific tasks, design
engineers can optimize it, reducing the size and cost of the product. Embedded systems are
often mass-produced, benefiting from economies of scale.
Physically, embedded systems range from portable devices such as digital watches
and MP3 players, to large stationary installations like traffic lights, factory controllers, or the
systems controlling nuclear power plants. In terms of complexity embedded systems run from
simple, with a single microcontroller chip, to very complex with multiple units, peripherals
and networks mounted inside a large chassis or enclosure.
Mobile phones or handheld computers share some elements with embedded
systems, such as the operating systems and microprocessors which power them, but are not
Finger Print Based Security System
truly embedded systems themselves because they tend to be more general purpose, allowing
different applications to be loaded and peripherals to be connected.
Examples of Embedded Systems
An embedded system typically has a specialized function with programs stored on
ROM. Examples of embedded systems are chips that monitor automobile functions, including
engine controls, antilock brakes, air bags, active suspension systems, environmental systems,
security systems, and entertainment systems. Everything needed for those functions is custom
designed into specific chips. No external operating system is required.
Network managers will need to manage more and more embedded systems devices,
ranging from printers to scanners, to handheld computing devices, to cell phones. All of these
have a need to connect with other devices, either directly or through a wireless or directconnect network. Most will have custom operating systems or variations of existing operating
systems (e.g., Microsoft Windows CE).
It's easy to picture nearly every electronic device as having an embedded system.
For example, refrigerators, washing machines, and even coffee brewers will benefit in some
way from embedded systems. A critical feature of an embedded system is its ability to
communicate, so embedded systems support Ethernet, Bluetooth (wireless), infrared, or other
technologies.
A weather station on top of a building may employ an embedded system that
gathers information from external sensors. This information can be pushed or pulled. In the
push scenario, the data is automatically sent to devices that have requested it. In the pull
scenario, users or network devices access the weather station to read the latest information.
Characteristics of Embedded System:
•
An embedded system is any computer system hidden inside a product other than a
computer
•
There will encounter a number of difficulties when writing embedded system
software in addition to those we encounter when we write applications
1. Throughput – Our system may need to handle a lot of data in a short period of
time.
Finger Print Based Security System
2. Response–Our system may need to react to events quickly
3. Testability–Setting up equipment to test embedded software can be difficult
4. Debugability–Without a screen or a keyboard, finding out what the software is
doing wrong (other than not working) is a troublesome problem
5.
Reliability – embedded systems must be able to handle any situation without
human intervention
6. Memory space – Memory is limited on embedded systems, and you must make
the software and the data fit into whatever memory exists
7. Program installation – you will need special tools to get your software into
embedded systems
8. Power consumption – Portable systems must run on battery power, and the
software in these systems must conserve power
9. Processor hogs – computing that requires large amounts of CPU time can
complicate the response problem
10. Cost – Reducing the cost of the hardware is a concern in many embedded system
projects; software often operates on hardware that is barely adequate for the job.
•
Embedded systems have a microprocessor/ microcontroller and a memory. Some
have a serial port or a network connection. They usually do not have keyboards,
screens or disk drives.
1.3 Applications
Personal laptops and ATM
Door lock system and Safe box
Vehicles
Industry
Finger Print Based Security System
2. BLOCK DIAGRAM AND DESCRIPTION
2.1 Block Diagram
Fig 2.1 Block Diagram
2.2 Block Diagram Description
The block diagram and its brief description are explained in block wise and this consists of
following blocks
MICROCONTROLLER
FINGERPRINT MODULE
RS-232 Cable, MAX-232.
LCD (LIQUID CRYSTAL DISPLAY)
POWER SUPPLY
DC MOTOR
Finger Print Based Security System
Microcontroller AT89S52
The major heart of this project is at89s52 microcontroller, the reasons why we
selected this in our project?,. The AT89S52 provides the following standard features: 8K
bytes of Flash, 256 bytes of RAM, 32 I/O lines, Watchdog timer, two data pointers, three 16bit timer/counters, a six-vector two-level interrupt architecture, a full duplex serial port, onchip oscillator, and clock circuitry. In addition, the AT89S52 is designed with static logic for
operation down to zero frequency and supports two software selectable power saving modes.
The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port, and
interrupt system to continue functioning. The Power-down mode saves the RAM con-tents
but freezes the oscillator, disabling all other chip functions until the next interrupt or
hardware reset.
Fingerprint module
Fingerprint module consists of f fingerprint sensor and scanning section.A fingerprint
pattern is composed of a sequence of ridges and valleys. In a fingerprint image, the ridges
appear as dark lines while the valleys are the light areas between the ridges. A cut or burn to a
finger does not affect the underlying ridge structure, and the original pattern will be
reproduced when new skin grows. Ridges and valleys generally run parallel to each other,
and their patterns can be analyzed on a global and local level. Ridges and valleys generally
run parallel to each other, and their patterns can be analyzed on a global and local level.
LCD Module
A liquid crystal is a material (normally organic for LCDs) that will flow like a liquid
but whose molecular structure has some properties normally associated with solids. The
Liquid Crystal Display (LCD) is a low power device. The power requirement is typically in
the order of microwatts for the LCD. However, an LCD requires an external or internal light
source. It is limited to a temperature range of about 0C to 60C and lifetime is an area of
concern, because LCDs can chemically degrade
There are two major types of LCDs which are:
1. Dynamic-scattering LCDs
2. Field-effect LCDs
Finger Print Based Security System
Field-effect LCDs are normally used in such applications where source of energy is
a prime factor (e.g., watches, portable instrumentation etc.).They absorb considerably less
power than the light-scattering type. However, the cost for field-effect units is typically
higher, and their hoight is limited to 2 inches. On the other hand, light-scattering units are
available up to 8 inches in height. Field-effect LCD is used in the project for displaying the
appropriate information.
The turn-on and turn-off time is an important consideration in all displays. The
response time of LCDs is in the range of 100 to 300ms.The lifetime of LCDs is steadily
increasing beyond 10,000+hours limit. Since the color generated by LCD units is dependent
on the source of illumination, there is a wide range of color choice.
Power supply
The Entire Project needs power for its operation. However, from the study of this
project it comes to know that we supposed to design 5v and 12v dc power supply. So by
utilizing the following power supply components, required power has been gained. (230/12v
(1A and 500mA) – Step down transformers, Bridge rectifier to converter ac to dc, booster
capacitor and +5v (7805) and +12v (7812) regulator to maintain constant 5v & 12 supply for
the controller circuit and Fingerprint module).
DC Motors
In this project DC motors can be used to drive the gates. There are always two
options in front of the designer whether to use a DC motor or a stepper motor. When it comes
to speed, weight, size, cost... DC motors are always preferred over stepper motors. There are
many things which you can do with your DC motor when interfaced with a microcontroller.
For example you can control the speed of motor; you can control the direction of rotation. In
this part of tutorial we will learn to interface and control of a DC motor with a
microcontroller. Usually H‐bridge is preferred way of interfacing a DC motor. These days
many IC manufacturers have H‐bridge motor driver available in the market like L293D is
most used H Bridge driver IC. H‐bridge can also be made with the help of transistors and
MOSFETs etc. rather of being cheap, they only increase the size of the design board, which is
sometimes not required so using a small 16 pin IC is preferred for this purpose.
Finger Print Based Security System
3. FINGERPRINT MODULE
3.1 Introduction
In the 21st century the use of biometric based systems have seen an exponential
growth. This is all because of tremendous progress in this field making it possible to bring
down their prices, easiness of use and its diversified use in every day life. Biometrics is
becoming new state of art method of security systems. Biometrics are used to prevent
unauthorized access to ATM, cellular phones , laptops , offices, cars and many other security
concerned things. Biometric have brought significant changes in security systems making
them more secure then before, efficient and cheap. They have changed the security system
from what you remember (such as password) or what you possess (such as car keys) to
something you embody (retinal patterns, fingerprints, voice recognition).
What is biometrics?
Biometrics is the science of verifying the identity of an individual through
physiological measurements or behavioral traits. Since biometric identifiers are associated
permanently with the user they are more reliable than token or knowledge based
authentication methods.
Advantages of Biometrics
Biometrics offers several advantages over traditional security measures. Some of
them are presented below.
1. Accuracy and Security
Biometrics based security systems are far most secure and accurate than traditional
password or token based security systems. For example a password based security system has
always the threat of being stolen and accessed by the unauthorized user. Further more the
traditional security systems are always prone to accuracy as compared to biometrics which is
more accurate.
2.One individual, Multiple IDs
Traditional security systems face the problem that they don’t give solution to the
problem of individuals having multiple IDs. For examples a person having multiple passports
to enter a foreign country. Thanks to biometrics!!! They give us a system in which an
Finger Print Based Security System
individual can’t possess multiple IDs and can’t change his ID through out his life time. Each
individual is identified through a unique Biometric identity throughout the world.
3. One ID, multiple individuals
In traditional security systems one ID can be used by multiple individuals. For
example in case of a password based security system a single password can be shared among
multiple individuals and they can share the resources allotted to a single individual. Biometric
based security system doesn’t allow such a crime. Here each individual has a single unique
ID and it can’t be shared with any other individual.
Biometrics categories
Biometrics can be categorized in various categories as follow.
1.Physical biometrics
2. Behavioral biometrics
Physical biometrics
This biometrics involves measurement of physical characteristics of individuals. The
most prominent of these include
Fingerprints
Face
Hand geometry
Iris scans
Behavioral biometrics
This category of biometrics is temporal in nature. They are evolved during the life
time of an individual. It involves measuring the way in which an individual performs certain
tasks. Behavioral biometrics include
Gait
Handwriting
Speech
Signature
Finger Print Based Security System
3.2 History of Fingerprint
Fingerprints have been scientifically studied for many years in our society. The
characteristics of fingerprints were studied as early as 1600s. Meanwhile, using fingerprints
as a means of identification first occurred in the mid-1800s. Sir William Herschel, in 1859,
discovered that fingerprints do not change over time and that each pattern is unique to an
individual. With these findings, he was the first to implement a system using fingerprints and
handprints to identify an individual in 1877. By 1896, police forces in India realized the
benefit of using fingerprints to identify criminals, and they began collecting the fingerprints
of prisoners along with their other measurements
With a growing database of fingerprint images, it soon became desirable to have an
efficient manner of classifying the various images. Between 1896 and 1897, Sir Edward
Henry developed the Henry Classification System, which quickly found worldwide
acceptance within a few years. This system allows for logical categorization of a complete set
of the ten fingerprint images for a person. By establishing groupings based on fingerprint
pattern types, the Henry System greatly reduces the effort of searching a large database. Until
the mid-1990s, many organizations continued to use the Henry Classification System to store
their physical files of fingerprint images.
As fingerprints began to be utilized in more fields, the number of requests for
fingerprint matching began to increase on a daily basis. At the same time, the size of the
databases continued to expand with each passing day. Therefore, it soon became difficult for
teams of fingerprint experts to provide accurate results in a timely manner. In the early 1960s,
the FBI, Home Office in the United Kingdom, and Paris Police Department began to devote a
large amount of resources in developing automatic fingerprint identification systems. These
systems allowed for an improvement in operational productivity among law enforcement
agencies. At the same time, the automated systems reduced funding requirements to hire and
train human fingerprint experts. Today, automatic fingerprint recognition technology can be
found in a wide range of civilian applications.
What is A Fingerprint ?
A fingerprint is the feature pattern of one finger. It is believed with strong evidences
that each fingerprint is unique. Each person has his own fingerprints with the permanent
uniqueness. So fingerprints have being used for identification and forensic investigation for a
Finger Print Based Security System
long time. Fingerprint recognition is one of the most reliable identification techniques.
Fingerprint technology is the most widely used for security purposes. The Technology is
being frequently used in criminal investigation purpose.
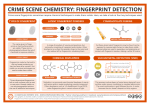
Figure 3.2 Fingerprint image acquired by an Optical Sensor.
3.3 Fingerprint features
A fingerprint pattern is composed of a sequence of ridges and valleys. In a fingerprint
image, the ridges appear as dark lines while the valleys are the light areas between the ridges.
A cut or burn to a finger does not affect the underlying ridge structure, and the original
pattern will be reproduced when new skin grows. Ridges and valleys generally run parallel to
each other, and their patterns can be analyzed on a global and local level. Ridges and valleys
generally run parallel to each other, and their patterns can be analyzed on a global and local
level.
Depending on the application, fingerprint based systems can be used in one of two
modes
1) Master Mode (enrollment, deletion…..).
2) User Mode (Verification or identification).
1. Master Mode (Enrollment, Deletion):
Enrollment is done in this mode. In this mode fingerprint image is captured by a
scanner, enhanced, encoded, and stored as a reference template for future comparisons. How
fingerprint systems extract features and encode and store information in the template is based
Finger Print Based Security System
on the system vendor’s proprietary algorithms. Template size varies depending on the vendor
and the technology. Templates can be stored remotely in a central database or within the
device itself. The reference template is linked to the identity specified on the identification
document. This reference template linked to the corresponding identity is later used for the
authentication purpose. Deletion of the enrolled users is also done in this mode.
Figure3.3.1 Master Mode Block Diagram
The registration of the employees is done directly through interfacing the FM10
(Finger Print Module) to the computer in the master mode. The application program is
developed using java API. The Java communication API is used to communicate with the
fingerprint device by which registration process can be done. The employee details along
with biometric information database are stored in the flash memory of the Fingerprint
module. The flash memory can store 100 users of data. The fingerprint image is scanned
twice for each user and the corresponding two images along with the user ID and password
are stored in the flash memory.
2. User Mode (Verification or Identification)
In this mode, the step after enrollment is to verify that a person is who he or she
claims to be (i.e., the person who enrolled). After the individual provides the fingerprint he or
she enrolled with, which the fingerprint system captures, generating a trial template that is
based on the vendor’s algorithm. The system then compares the trial biometric template with
Finger Print Based Security System
this person’s reference template, which was stored in the system during enrollment, to
determine whether the individual’s trial and stored templates match (see figure 1).
L.C.D
FINGER PRINT
SENSOR
MICRO CONTROLLER
89S52
FINGER PRINT
MODULE
ULN 2003
MAX232
Figure 3.3.2 User Mode Block diagram
Microcontroller 89S52 is programmed to operate under user mode. The
microcontroller is interfaced with Fingerprint sensor, Computer, Infrared sensors, Keyboard,
LCD display, Relays, Door Activators. Important sections involved in the user mode:
Fingerprint Scanning section.
Microcontroller section.
LIQUID CRYSTAL DISPLAY Section.
Microcontroller-computer Interface Section.
Relay section.
Finger Print Based Security System
3.4 Fingerprint Scanning section
NITIGEN FIM10 a stand-alone Fingerprint Recognition Device is used for scanning
the finger fingerprint image. It provides the high recognition performance, the low power
dissipation and the RS-232 serial interface with the simple protocol for easy integration into a
wide range of applications. It has a in built Flash Memory which has a capacity of storing 100
users. The Fingerprint sensor is scans the Fingerprint and convert that Fingerprint image to
an equivalent 16 byte template. For each user two Fingerprint images each of size 16 bytes,
ID (10 bytes), Password (16 bytes) is stored in the Flash Memory.
In this user mode this FIM10 (Fingerprint Device) is interfaced with the
Microcontroller 89S52. Before entering an organization the employee provides his ID and
fingerprint device is used to scan the fingerprint of he or she enrolled with, generating a trial
template. The device then compares the trial fingerprint template with this person’s reference
template, which was stored in the device memory during enrollment, to determine whether
the employee trial and stored templates match. This information is reported to the
Microcontroller. The Microcontroller is programmed to do necessary tasks.
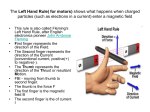
Position of the fingerprint
In order to capture the most minutiae, maximize the surface area of the fingerprint on
the fingerprint input window.
Figure shows the correct positioning of the fingerprint on the input window.
Figure 3.4.1 Correct positioning of fingerprint on input window
Finger Print Based Security System
Figure Common mistakes
Allowable angle of fingerprint rotation
Figure 3.4.2 The allowable angle of fingerprint rotation.
Fingerprint Recognition
Our fingerprint recognition system is ultimately based on a well defined
representation of a fingerprint recognition Technique. Taking a Fingerprint at first we
enhanced the quality of that image to make the image clearer for easy further operations.
Since the fingerprint images acquired from sensors or other medias are not assured with
perfect quality, those enhancement methods, for increasing the contrast between ridges and
furrows and for connecting the false broken points of ridges due to insufficient amount of ink,
are very useful for keep a higher accuracy to fingerprint recognition. various methods that are
adopted in our fingerprint recognition system to enhance the image quality are Fingerprint
Enhancement by Histogram Equalization and Fingerprint Enhancement by Fourier
Transform.
The fingerprint recognition problem can be grouped into two sub-domains: one is
fingerprint verification and the other is fingerprint identification. Fingerprint verification is to
Finger Print Based Security System
verify the authenticity of one person by his fingerprint. The user provides his fingerprint
together with his identity information like his ID number. The fingerprint verification system
retrieves the fingerprint template according to the ID number and matches the template with
the real-time acquired fingerprint from the user. Usually it is the underlying design principle
of AFAS (Automatic Fingerprint Authentication System).Fingerprint identification is to
specify one person’s identity by his fingerprint(s). Without knowledge of the person’s
identity, the fingerprint identification system tries to match his fingerprint(s) with those in the
whole fingerprint database. It is especially useful for criminal investigation cases. And it is
the design principle of AFIS (Automatic Fingerprint Identification System). However, all
fingerprint recognition problems, either verification or identification, are ultimately based on
a well-defined representation of a fingerprint. As long as the representation of fingerprints
remains the uniqueness and keeps simple, the fingerprint matching, either for the 1-to-1
verification case or 1-to-m identification case, is straightforward and easy.
FIM30N
FIM30N is a low-price stand-alone Fingerprint Identification Device with many
excellent features. It provides benefits such as high identification performance, low power
consumption and RS-232 serial interface with the various commands for easy integration into
a wide range of applications. It is a durable and compact device with fingerprint identification
module containing NITGEN® optics-based fingerprint sensor inside.
Target Application
1. Door-lock system
2. Safe Box
3. Simple Access Controller
4. Vehicle Control
5. ATM , POS
6. And more
Finger Print Based Security System
Basic Feature
Hardware Specification
Table 3.4.1 Hardware specification of FIM3030
Operation Specification
Table 3.4.2 Operational specification of FIM3030
Verification systems can contain databases ranging from dozens to millions of
enrolled templates but are always predicated on matching an individual’s presented
fingerprint against his or her reference template. Nearly all verification systems can render a
match–no-match decision in less than a second. A system that requires employees to
Finger Print Based Security System
authenticate their claimed identities before granting them access to secure buildings or to
computers is a verification application. In this mode creation and deletion of users is not
possible.
Our project is developed to provide security to an Organization. In this project
NITIGEN fingerprint sensor is used to scan the fingerprint image. The registration of the
employees is done directly through interfacing the FM10 (Fingerprint Module) to the
computer in the master mode. The application program is developed using java API. The
employee details along with biometric information database is stored in the flash memory of
the Fingerprint Module. The Microcontroller 89S52 is programmed to operate under user
mode.
Figure 3.4.4 The Fingerprint Verification Process
Finger Print Based Security System
4.MICROCONTROLLER
4.1 Introduction to Microcontroller
A microcontroller (or MCU) is a computer-on-a-chip. It is a type of microprocessor
emphasizing self-sufficiency and cost-effectiveness, in contrast to a general-purpose
microprocessor (the kind used in a PC).
Typical Microcontroller Architecture and Features
The basic internal designs of microcontrollers are pretty similar. Figure1 shows the
block diagram of a typical microcontroller. All components are connected via an internal bus
and are all integrated on one chip. The modules are connected to the outside world via I/O
pins.
Figure 4.1 Basic Layout of Microcontroller
The following list contains the modules typically found in a microcontroller. You can find a
more detailed description of these components in later sections.
Processor Core
The CPU of the controller . It contains the arithmetic logic unit, the control unit, and
the registers (stack pointer, program counter, accumulator register, register file . . .).
Finger Print Based Security System
Memory
The memory is sometimes split into program memory and data memory. In larger
controllers, a DMA controller handles data transfers between peripheral components and the
memory.
Interrupt Controller
Interrupts are useful for interrupting the normal program flow in case of (important)
external or internal events. In conjunction with sleep modes, they help to conserve power.
Timer/Counter
Most controllers have at least one and more likely 2-3 Timer/Counters, which can be
used to timestamp events, measure intervals, or count events. Many controllers also contain
PWM (pulse width modulation) outputs, which can be used to drive motors or for safe
breaking (antilock brake system, ABS). Furthermore the PWM output can, in conjunction
with an external filter, be used to realize a cheap digital/analog converter.
Digital I/O
Parallel digital I/O ports are one of the main features of microcontrollers. The number
of I/O pins varies from 3-4 to over 90, depending on the controller family and the controller
type.
Analog I/O
Apart from a few small controllers, most microcontrollers have integrated
analog/digital converters, which differ in the number of channels (2-16) and their resolution
(8-12 bits). The analog module also generally features an analog comparator. In some cases,
the microcontroller includes digital/analog converters.
The UART: What it is and how it works
The Universal Asynchronous Receiver/Transmitter (UART) controller is the key
component of the serial communications subsystem of a computer. The UART takes bytes of
data and transmits the individual bits in a sequential fashion. At the destination, a second
UART re-assembles the bits into complete bytesSerial transmission is commonly used with
Finger Print Based Security System
modems and for non-networked communication between computers, terminals and other
devices.
There are two primary forms of serial transmission: Synchronous and Asynchronous.
Depending on the modes that are supported by the hardware, the name of the communication
sub-system will usually include a A if it supports Asynchronous communications, and a S if it
supports Synchronous communications. Both forms are described below.
Synchronous Serial Transmission
Synchronous serial transmission requires that the sender and receiver share a clock
with one another, or that the sender provide a strobe or other timing signal so that the receiver
knows when to “read” the next bit of the data. In most forms of serial Synchronous
communication, if there is no data available at a given instant to transmit, a fill character must
be sent instead so that data is always being transmitted. Synchronous communication is
usually more efficient because only data bits are transmitted between sender and receiver, and
synchronous communication can be more costly if extra wiring and circuits are required to
share a clock signal between the sender and receiver.
A form of Synchronous transmission is used with printers and fixed disk devices in
that the data is sent on one set of wires while a clock or strobe is sent on a different wire.
Printers and fixed disk devices are not normally serial devices because most fixed disk
interface standards send an entire word of data for each clock or strobe signal by using a
separate wire for each bit of the word. In the PC industry, these are known as Parallel
devices.
The standard serial communications hardware in the PC does not support
Synchronous operations. This mode is described here for comparison purposes only
Asynchronous Serial Transmission
Asynchronous transmission allows data to be transmitted without the sender having to
send a clock signal to the receiver. Instead, the sender and receiver must agree on timing
parameters in advance and special bits are added to each word which are used to synchronize
the sending and receiving units.
Finger Print Based Security System
When a word is given to the UART for Asynchronous transmissions, a bit called the
"Start Bit" is added to the beginning of each word that is to be transmitted. The Start Bit is
used to alert the receiver that a word of data is about to be sent, and to force the clock in the
receiver into synchronization with the clock in the transmitter. These two clocks must be
accurate enough to not have the frequency drift by more than 10% during the transmission of
the remaining bits in the word. (This requirement was set in the days of mechanical tele
printers and is easily met by modern electronic equipment.)
After the Start Bit, the individual bits of the word of data are sent, with the Least
Significant Bit (LSB) being sent first. Each bit in the transmission is transmitted for exactly
the same amount of time as all of the other bits, and the receiver “looks” at the wire at
approximately halfway through the period assigned to each bit to determine if the bit is a 1 or
a 0. For example, if it takes two seconds to send each bit, the receiver will examine the signal
to determine if it is a 1 or a 0 after one second has passed, then it will wait two seconds and
then examine the value of the next bit, and so on.
The sender does not know when the receiver has “looked” at the value of the bit. The
sender only knows when the clock says to begin transmitting the next bit of the word. When
the entire data word has been sent, the transmitter may add a Parity Bit that the transmitter
generates. The Parity Bit may be used by the receiver to perform simple error checking. Then
at least one Stop Bit is sent by the transmitter.
When the receiver has received all of the bits in the data word, it may check for the Parity
Bits (both sender and receiver must agree on whether a Parity Bit is to be used), and then the
receiver looks for a Stop Bit.
If the Stop Bit does not appear when it is supposed to, the UART considers the entire
word to be garbled and will report a Framing Error to the host processor when the data word
is read. The usual cause of a Framing Error is that the sender and receiver clocks were not
running at the same speed, or that the signal was interrupted.
Regardless of whether the data was received correctly or not, the UART automatically
discards the Start, Parity and Stop bits. If the sender and receiver are configured identically,
these bits are not passed to the host. If another word is ready for transmission, the Start Bit
for the new word can be sent as soon as the Stop Bit for the previous word has been sent.
Finger Print Based Security System
4.2 AT89S52 MICROCONTROLLER
Description
The AT89s52 is a low power, high performance CMOS 8-bit micro computer
with 8K bytes of flash programmable and erasable read only memory(PEROM).The device
is manufactured using Atmel’s high density nonvolatile memory technology and is
compatible with the industry standard 80c51 and 80C52 instruction set and pin out. The onchip flash allows the program memory to be reprogrammed in-system or by a conventional
nonvolatile memory programmer. By combining a versatile 8-bit CPU with flash on a
monolithic chip, the Atmel AT89s52 Is a powerful microcomputer which provides a highly
flexible and cost effective solution to many embedded control applications. The main
advantages of 89s52 over 8051 are
Software Compatibility
Program Compatibility
Rewritability
The 89s52 microcontroller has an excellent software compatability, i.e. the
software used can be applicable to any other microcontroller. The program written on this
microcontroller can be carried to any base.
Program compatibility is the major advantage in 89s52. The program can be used
in any other advanced microcontroller. The program can be reloaded and changed for
nearly 1000 times.
Features
• Compatible with MCS-51® Products
• 8K Bytes of In-System Programmable (ISP) Flash Memory
• 4.0V to 5.5V Operating Range
• Fully Static Operation: 0 Hz to 33 MHz
• Three-level Program Memory Lock
• 256 x 8-bit Internal RAM
Finger Print Based Security System
• 32 Programmable I/O Lines
• Three 16-bit Timer/Counters
• Eight Interrupt Sources
• Full Duplex UART Serial Channel
• Low-power Idle and Power-down Modes
• Interrupt Recovery from Power-down Mode
• Watchdog Timer
• Dual Data Pointer
• Power-off Flag
89S52 Processor Architecture
The AT89s52 provides the following standard features: 8K bytes of Flash, 256 bytes
of RAM, 32 I/O lines, three 16-bit timer/counters, a six-vector two-level interrupt
architecture, a full-duplex serial port, on-chip oscillator, and clock circuitry. In addition, the
AT89s52 is designed with static logic for operation down to zero frequency and supports two
software selectable power saving modes. The Idle Mode stops the CPU while allowing the
RAM, timer/counters, serial port, and interrupt system to continue functioning. The Powerdown mode saves the RAM contents but freezes the oscillator, disabling all other chip
functions until the next hardware reset.
Finger Print Based Security System
Figure 4.2.1 89S52 microcontroller architecture
Finger Print Based Security System
Pin Diagram
Figure 4.2.2 Pin diagram of 89S52
Pin Description
VCC
Pin 40 provides supply voltage to the chip. The voltage source is + 5V.
GND
Pin 20 provides ground.
Finger Print Based Security System
Port 0
Port 0 is an 8-bit open drain bidirectional I/O port. As an output port, each pin can
sink eight TTL inputs. When 1s are written to port 0 pins, the pins can be used as high
impedance inputs.
Port 0 can also be configured to be the multiplexed low order address/data bus during
accesses to external program and data memory. In this mode, P0 has internal pull ups.
Port 0 also receives the code bytes during Flash programming and outputs the code
bytes during program verification. External pull ups are required during program verification.
Port 1
Port 1 is an 8-bit bidirectional I/O port with internal pull ups. The Port 1 output
buffers can sink/source four TTL inputs. When 1s are written to Port 1 pins, they are pulled
high by the internal pull ups and can be used as inputs. As inputs, Port 1 pins that are
externally being pulled low will source current (IIL) because of the internal pull ups.
In addition, P1.0 and P1.1 can be configured to be the timer/counter 2 external count
input (P1.0/T2) and the timer/counter 2 trigger input (P1.1/T2EX), respectively, as shown in
the following table.
Port 1 also receives the low-order address bytes during Flash programming and
verification.
Table 4.2.1 Port1 specifications
Finger Print Based Security System
Port 2
Port 2 is an 8-bit bidirectional I/O port with internal pull ups. The Port 2 output
buffers can sink/source four TTL inputs. When 1s are written to Port 2 pins, they are pulled
high by the internal pull-ups and can be used as inputs. As inputs, Port 2 pins that are
externally being pulled low will source current (IIL) because of the internal pull-ups.
Port 2 emits the high-order address byte during fetches from external program
memory and during accesses to external data memory that uses 16-bit addresses (MOVX @
DPTR). In this application, Port 2 uses strong internal pull-ups when emitting 1s. During
accesses to external data memory that uses 8-bit addresses (MOVX @ RI), Port 2 emits the
contents of the P2 Special Function Register.
Port 2 also receives the high-order address bits and some control signals during Flash
programming and verification.
Port 3
Port 3 is an 8-bit bidirectional I/O port with internal pull-ups. The Port 3 output
buffers can sink/source four TTL inputs. When 1s are written to Port 3 pins, they are pulled
high by the internal pull-ups and can be used as inputs. As inputs, Port 3 pins that are
externally being pulled low will source current (IIL) because of the pull-ups.
Port 3 also serves the functions of various special features of the AT89S52, as shown
in the following table.
Port 3 also receives some control signals for Flash programming and verification.
Table 4.2.2 Port3 specifications
Finger Print Based Security System
RST
Reset input. A high on this pin for two machine cycles while the oscillator is running
resets the device. This pin drives High for 96 oscillator periods after the Watchdog times out.
The DISRTO bit in SFR AUXR (address 8EH) can be used to disable this feature. In the
default state of bit DISRTO, the RESET HIGH out feature is enabled.
ALE/PROG
Address Latch Enable (ALE) is an output pulse for latching the low byte of the
address during accesses to external memory. This pin is also the program pulse input (PROG)
during flash programming.
In normal operation, ALE is emitted at a constant rate of 1/6 the oscillator frequency
and may be used for external timing or clocking purposes. Note, however, that one ALE
pulse is skipped during each access to external data memory.
If desired, ALE operation can be disabled by setting bit 0 of SFR location 8EH. With
the bit set, ALE is active only during a MOVX or MOVC instruction. Otherwise, the pin is
weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in
external execution mode.
PSEN
Program Store Enable (PSEN) is the read strobe to external program memory. When
the AT89S52 is executing code from external program memory, PSEN is activated twice
each machine cycle, except that two PSEN activations are skipped during each access to
external data memory.
EA/VPP
External access enables. EA must be strapped to GND in order to enable the device to
fetch code from external program memory locations starting at 0000H up to FFFFH.
Note, however, that if lock bit 1 is programmed, EA will be internally latched on
reset. EA should be strapped to VCC for internal program executions. This pin also receives
the 12-volt programming enable voltage (VPP) during Flash programming.
Finger Print Based Security System
XTAL1
Input to the inverting oscillator amplifier and input to the internal clock operating
circuit.
XTAL2
Output from the inverting oscillator amplifier.
Special Function Registers
A map of the on-chip memory area called the Special Function Register (SFR) space
is shown in Table 1. Note that not all of the addresses are occupied, and unoccupied
addresses may not be implemented on the chip. Read accesses to these addresses will in
general return random data, and write accesses will have an indeterminate effect.
User software should not write 1s to these unlisted locations, since they may be used
in future products to invoke new features. In that case, the reset or inactive values of the new
bits will always be 0.
Timer 2 Registers
Control and status bits are contained in registers T2CON (shown in Table 2) and
T2MOD (shown in Table 3) for Timer 2. The register pair (RCAP2H, RCAP2L) is the
Capture/Reload registers for Timer 2 in 16-bit capture mode or 16-bit auto-reload mode.
Interrupt Registers
The individual interrupt enable bits are in the IE register. Two priorities can be set for
each of the six interrupt sources in the IP register.
Dual Data Pointer Registers
To facilitate accessing both internal and external data memory, two banks of 16-bit
Data Pointer Registers are provided: DP0 at SFR address locations 82H-83H and DP1 at
84H-85H. Bit DPS = 0 in SFR AUXR1 selects DP0 and DPS = 1 selects DP1. The user
should always initialize the DPS bit to the appropriate value before accessing the respective
Data Pointer Register.
Finger Print Based Security System
Power Off Flag
The Power Off Flag (POF) is located at bit 4 (PCON.4) in the PCON SFR. POF is set
to “1” during power up. It can be set and rest under software control and is not affected by
reset.
Memory Organization
MCS-51 devices have a separate address space for Program and Data Memory. Up to
64K bytes each of external Program and Data Memory can be addressed.
Program Memory
If the EA pin is connected to GND, all program fetches are directed to external
memory. On the AT89S52, if EA is connected to VCC, program fetches to addresses 0000H
through 1FFFH are directed to internal memory and fetches to addresses 2000H through
FFFFH are to external memory.
Data Memory
The AT89S52 implements 256 bytes of on-chip RAM. The upper 128 bytes occupy a
parallel address space to the Special Function Registers. This means that the upper 128 bytes
have the same addresses as the SFR space but are physically separate from SFR space.
When an instruction accesses an internal location above address 7FH, the address
mode used in the instruction specifies whether the CPU accesses the upper 128 bytes of RAM
or the SFR space. Instructions which use direct addressing access of the SFR space.
For example, the following direct addressing instruction accesses the SFR at location
0A0H (which is P2).
MOV 0A0H, #data
Instructions that use indirect addressing access the upper 128 bytes of RAM. For
example, the following indirect addressing instruction, where R0 contains 0A0H, accesses the
data byte at address 0A0H, rather than P2 (whose address is 0A0H).
MOV @R0, #data
Finger Print Based Security System
Note that stack operations are examples of indirect addressing, so the upper 128 bytes
of data RAM are available as stack space.
Watchdog Timer (One-time Enabled with Reset-out)
The WDT is intended as a recovery method in situations where the CPU may be
subjected to software upsets. The WDT consists of a 13-bit counter and the Watchdog Timer
Reset (WDTRST) SFR. The WDT is defaulted to disable from exiting reset. To enable the
WDT, a user must write 01EH and 0E1H in sequence to the WDTRST register (SFR location
0A6H). When the WDT is enabled, it will increment every machine cycle while the oscillator
is running. The WDT timeout period is dependent on the external clock frequency. There is
no way to disable the WDT except through reset (either hardware reset or WDT overflow
(reset). When WDT overflows, it will drive an output RESET HIGH pulse at the RST pin.
Using the WDT
To enable the WDT, a user must write 01EH and 0E1H in sequence to the WDTRST
register (SFR location 0A6H). When the WDT is enabled, the user needs to service it by
writing 01EH and 0E1H to WDTRST to avoid a WDT overflow. The 13-bit counter
overflows when it reaches 8191 (1FFFH), and this will reset the device. When the WDT is
enabled, it will increment every machine cycle while the oscillator is running. This means the
user must reset the WDT at least every 8191 machine cycles. To reset the WDT the user must
write 01EH and 0E1H to WDTRST. DTRST is a write-only register. The WDT counter
cannot be read or written. When WDT overflows, it will generate an output RESET pulse at
the RST pin. The RESET pulse duration is 96xTOSC, where TOSC=1/FOSC. To make the
best use of the WDT, it should be serviced in those sections of code that will periodically be
executed within the time required to prevent a WDT reset.
WDT during Power-down and Idle
In Power-down mode the oscillator stops, which means the WDT also stops. While in
Power-down mode, the user does not need to service the WDT. There are two methods of
exiting Power-down mode: by a hardware reset or via a level-activated external interrupt
which is enabled prior to entering Power-down mode. When Power-down is exited with
hardware reset, servicing the WDT should occur as it normally does whenever the AT89S52
is reset. Exiting Power-down with an interrupt is significantly different. The interrupt is held
Finger Print Based Security System
low long enough for the oscillator to stabilize. When the interrupt is brought high, the
interrupt is serviced. To prevent the WDT from resetting the device while the interrupt pin is
held low, the WDT is not started until the interrupt is pulled high. It is suggested that the
WDT be reset during the interrupt service for the interrupt used to exit Power-down mode.
To ensure that the WDT does not overflow within a few states of exiting Powerdown, it is best to reset the WDT just before entering Power-down mode.
Before going into the IDLE mode, the WDIDLE bit in SFR AUXR is used to
determine whether the WDT continues to count if enabled. The WDT keeps counting during
IDLE WDIDLE bit = 0) as the default state. To prevent the WDT from resetting the
AT89S52 while in IDLE mode, the user should always set up a timer that will periodically
exit IDLE, service the WDT, and reenter IDLE mode. With WDIDLE bit enabled, the WDT
will stop to count in IDLE mode and resumes the count upon exit from IDLE.
UART
Serial data communication uses two methods, asynchronous and synchronous. The
synchronous method transfers a block of data (characters ) at a time, while the asynchronous
method transfers a single byte at a time. It is possible to write software to use either of these
methods, but programs can be tedious and long. For this reason, there are special IC chips
made by the manufacturers for the serial data communications. These chips are commonly
referred to as UART ( universal asynchronous receiver-transmitter) and USART ( universal
synchronous receiver-transmitter). The 8052 has built-in UART.
Timer 0
The 16-bit register of timer 0 is accessed as low byte and high byte. The low byte
register is called TL0 ( Timer 0 low byte) and the high byte register is referred to as TH0 (
Timer 0 high byte). These registers can be accessed like any other registers , such as
A,B,R0,R1,R2 etc. for example the instruction “MOV TL0,#4FH” moves the value 4FH into
TL0, the low byte of Timer 0. These registers can also be read like any other register. For
example, “MOV R5,TH0” saves TH0 ( high byte of Timer 0) in R5.
Finger Print Based Security System
Timer1
Timer 1 is also 16 bits and its 16-bit register is split into two bytes, referred to as TL1
(Timer 1 low byte ) and TH1 ( Timer 1 high byte). These registers are accessible in the same
way as the registers of Timer 0.
Timer 2
Timer 2 is a 16-bit Timer/Counter that can operate as either a timer or an event
counter. The type of operation is selected by bit C/T2 in the SFR T2CON (shown in Table 2).
Timer 2 has three operating modes: capture, auto-reload (up or down counting), and baud rate
generator. The modes are selected by bits in T2CON, as shown in Table 3. Timer 2 consists
of two 8-bit registers, TH2 and TL2. In the Timer function, the TL2 register is incremented
every machine cycle. Since a machine cycle consists of 12 oscillator periods, the count rate is
1/12 of the oscillator frequency.
Table 4.2.3 Timer2 Operating Modes of AT89S52
In the Counter function, the register is incremented in response to a 1-to-0 transition at its
corresponding external input pin, T2. In this function, the external input is sampled during
S5P2 of every machine cycle. When the samples show a high in one cycle and a low in the
next cycle, the count is incremented. The new count value appears in the register during S3P1
of the cycle following the one in which the transition was detected. Since two machine
cycles (24 oscillator periods) are required to recognize a 1-to-0 transition, the maximum
count rate is 1/24 of the oscillator frequency. To ensure that a given level is sampled at least
once before it changes, the level should be held for at least one full machine cycle.
Finger Print Based Security System
Oscillator Characteristics
XTAL1 and XTAL2 are the input and output, respectively, of an inverting amplifier that can
be configured for use as an on-chip oscillator, as shown in Figure 11. Either a quartz
crystal or ceramic resonator may be used. To drive the device from an external clock source,
XTAL2 should be left unconnected while XTAL1 is driven, as shown in Figure 12. There are
no requirements on the duty cycle of the external clock signal, since the input to the internal
clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage
high and low time specifications must be observed.
Oscillator connections
Figure 4.2.3 Oscillator Connections of AT89S52
Note: C1, C2 = 30 pF ± 10 pF for Crystals
= 40 pF ± 10 pF for Ceramic Resonators
Finger Print Based Security System
External Clock Drive Configuration
Figure 4.2.4 External Clock Drive Configuration of AT89S52
Idle Mode
In idle mode, the CPU puts itself to sleep while all the on chip peripherals remain
active. The mode is invoked by software. The content of the on-chip RAM and all the special
functions registers remain unchanged during this mode. The idle mode can be terminated by
any enabled interrupt or by a hardware reset. Note that when idle mode is terminated by a
hardware reset, the device normally resumes program execution from where it left off, up to
two machine cycles before the internal reset algorithm takes control. On-chip hardware
inhibits access to internal RAM in this event, but access to the port pins is not inhibited. To
eliminate the possibility of an unexpected write to a port pin when idle mode is terminated by
a reset, the instruction following the one that invokes idle mode should not write to a port pin
or to external memory.
Power-down Mode
In the Power-down mode, the oscillator is stopped, and the instruction that invokes
Power-down is the last instruction executed. The on-chip RAM and Special Function
Registers retain their values until the Power-down mode is terminated. Exit from Powerdown mode can be initiated either by a hardware reset or by an enabled external interrupt.
Reset redefines the SFRs but does not change the on-chip RAM. The reset should not be
Finger Print Based Security System
activated before VCC is restored to its normal operating level and must be held active long
enough to allow the oscillator to restart and stabilize.
Status of External Pins during Idle and Power-down Modes
Table 4.2.4 Power down and Idle Modes of AT89S52
Finger Print Based Security System
5. FUNCTIONAL DESCRIPTIONS
5.1 Lcd Display
Liquid crystal display (LCD) has material which combines the properties of both
liquid and crystals. They have a temperature range within which the molecules are almost as
mobile as they would be in a liquid, but are grouped together in an order form similar to a
crystal.
Fig 5.1.1 LCD module
More microcontroller devices are using 'smart LCD' displays to output visual
information. The following discussion covers the connection of a Hitachi LCD display to a
PIC microcontroller. LCD displays designed around Hitachi's LCD HD44780 module, are
inexpensive, easy to use, and it is even possible to produce a readout using the 8 x 80 pixels
of the display. Hitachi LCD displays have a standard ASCII set of characters plus Japanese,
Greek and mathematical symbols.
Finger Print Based Security System
Hardware Diagram
16 x 2 Char LCD
A
D0 EN RW
K D7
RS Vf
GND
ACK
Vcc
D0 – D7
R1
R2
Fig 5.1.2 LCD pin configuration
For an 8-bit data bus, the display requires a +5V supply plus 11 I/O lines. For a 4-bit
data bus it only requires the supply lines plus seven extra lines. When the LCD display is not
enabled, data lines are tri-state which means they are in a state of high impedance (as though
they are disconnected) and this means they do not interfere with the operation of the
microcontroller when the display is not being addressed. The LCD also requires 3 "control"
lines from the microcontroller.
When the LCD is initialized, it is ready to continue receiving data or instructions. If it
receives a character, it will write it on the display and move the cursor one space to the right.
The Cursor marks the next location where a character will be written. When we want to write
a string of characters, first we need to set up the starting address, and then send one character
at a time.
Finger Print Based Security System
Pins description
Table 5.1 pins for LCD
Logic status on control lines
RS (Command / Data):
This bit is to specify weather received byte is command or data. So that LCD can
recognize the operation to be performed based on the bit status.
RS
RS
= 0
= 1
=>
=>
Command
Data
RW (Read / Write)
RW bit is to specify weather controller wants READ from LCD or WRITE to LCD.
The READ operation here is just ACK bit to know weather LCD is free or not.
RW
RW
= 0
= 1
=>
=>
Write
Read
EN (Enable LCD)
EN bit is to ENABLE or DISABLE the LCD. When ever controller wants to write
some thing into LCD or READ acknowledgment from LCD it needs to enable the LCD.
EN = 0
EN = 1
=>
=>
High Impedance
Low Impedance
Finger Print Based Security System
ACK (LCD Ready)
ACK bit is to acknowledge the MCU that LCD is free so that it can send new
command or data to be stored in its internal Ram locations.
ACK = 1
ACK = 0
=>
=>
Not ACK
ACK
Reading data from the LCD is done in the same way, but control line R/W has to be
high. When we send a high to the LCD, it will reset and wait for instructions. Typical
instructions sent to LCD display after a reset are: turning on a display, turning on a cursor and
writing characters from left to right. Characters that can be shown on the display are stored
in data display (DD) RAM. The size of DDRAM is 80 bytes.
Before we access DD RAM after defining a special character, the program must set
the DD RAM address. Writing and reading data from any LCD memory is done from the last
address which was set up using set-address instruction. Once the address of DD RAM is set, a
new written character will be displayed at the appropriate place on the screen. Until now we
discussed the operation of writing and reading to an LCD as if it were an ordinary memory.
But this is not so. The LCD controller needs 40 to 120 microseconds (uS) for writing and
reading. Other operations can take up to 5 mS. During that time, the microcontroller can not
access the LCD, so a program needs to know when the LCD is busy. We can solve this in two
ways.One way is to check the BUSY bit found on data line D7. This is not the best method
because LCD's can get stuck, and program will then stay forever in a loop checking the
BUSY bit. The other way is to introduce a delay in the program. The delay has to be long
enough for the LCD to finish the operation in process.
At the beginning we mentioned that we needed 11 I/O lines to communicate with an
LCD. However, we can communicate with an LCD through a 4-bit data bus. Thus we can
reduce the total number of communication lines to seven.
Finger Print Based Security System
5.2 Power Supply Unit
The input to the circuit is applied from the regulated power supply. The a.c. input i.e.,
230V from the mains supply is step down by the transformer to 12V and is fed to a rectifier.
The output obtained from the rectifier is a pulsating d.c voltage. So in order to get a pure d.c
voltage, the output voltage from the rectifier is fed to a filter to remove any a.c components
present even after rectification. Now, this voltage is given to a voltage regulator to obtain a
pure constant dc voltage.
BLOCK DIAGRAM
230 AC
50Hz
DC
OUT PUT
Bridge
rectifier
S tep down
transformer
Fig 5.2.1 power supply
Power supply unit consists of following units
i) Step down transformer
ii) Rectifier unit
iii) Input filter
iv).Regulator unit
v) Output filter
filter
Regulator
Finger Print Based Security System
Step down Transformer
The Step down Transformer is used to step down the main supply voltage from 230V
AC to lower value. This 230 AC voltage cannot be used directly, thus it is stepped down. The
Transformer consists of primary and secondary coils. To reduce or step down the voltage, the
transformer is designed to contain less number of turns in its secondary core. The output from
the secondary coil is also AC waveform. Thus the conversion from AC to DC is essential.
This conversion is achieved by using the Rectifier Circuit/Unit.
Step down transformers can step down incoming voltage, which enables you to have
the correct voltage input for your electrical needs. For example, if our equipment has been
specified for input voltage of 12 volts, and the main power supply is 230 volts, we will need a
step down transformer, which decreases the incoming electrical voltage to be compatible with
your 12 volt equipment.
Rectifier Unit
The Rectifier circuit is used to convert the AC voltage into its corresponding DC
voltage. The most important and simple device used in Rectifier circuit is the diode. The
simple function of the diode is to conduct when forward biased and not to conduct in reverse
bias. Now we are using three types of rectifiers. They are
1. Half-wave rectifier
2. Full-wave rectifier
3. Bridge rectifier
Half-Wave Rectifier
In half wave rectification, either the positive or negative half of the AC wave is
passed, while the other half is blocked. Because only one half of the input waveform reaches
the output, it is very inefficient if used for power transfer. Half-wave rectification can be
achieved with a single diode in a one phase supply, or with three diodes in a three-phase
supply
Finger Print Based Security System
Bridge Rectifier
A bridge rectifier makes use of four diodes in a bridge arrangement to achieve fullwave rectification. This is a widely used configuration, both with individual diodes wired as
shown and with single component bridges where the diode bridge is wired internally.
A diode bridge or bridge rectifier is an arrangement of four diodes in a bridge
configuration that provides the same polarity of output voltage for either polarity of input
voltage. When used in its most common application, for conversion of alternating current
(AC) input into direct current (DC) output, it is known as a bridge rectifier. A bridge rectifier
provides full-wave rectification from a two-wire AC input, resulting in lower cost and weight
as compared to a center-tapped transformer design.
The Forward Bias is achieved by connecting the diode’s positive with positive of the
battery and negative with battery’s negative. The efficient circuit used is the Full wave
Bridge rectifier circuit. The output voltage of the rectifier is in rippled form, the ripples from
the obtained DC voltage are removed using other circuits available. The circuit used for
removing the ripples is called Filter circuit.
Input Filter
Capacitors are used as filter. The ripples from the DC voltage are removed and pure
DC voltage is obtained. And also these capacitors are used to reduce the harmonics of the
input voltage. The primary action performed by capacitor is charging and discharging. It
charges in positive half cycle of the AC voltage and it will discharge in negative half cycle.
So it allows only AC voltage and does not allow the DC voltage. This filter is fixed before
the regulator. Thus the output is free from ripples.
Regulator Unit
Regulator regulates the output voltage to be always constant. The output voltage is
maintained irrespective of the fluctuations in the input AC voltage. As and then the AC
voltage changes, the DC voltage also changes. Thus to avoid this Regulators are used. Also
when the internal resistance of the power supply is greater than 30 ohms, the output gets
Finger Print Based Security System
affected. Thus this can be successfully reduced here. The regulators are mainly classified for
low voltage and for high voltage. Further they can also be classified as
i) Positive regulator
1. input pin
2. ground pin
3. output pin
It regulates the positive voltage.
ii) Negative regulator
1. ground pin
2. input pin
3. output pin
It regulates the negative voltage.
Fixed Regulators
Fig 5.2.2 An assortment of 78xx series ICs
"Fixed" three-terminal linear regulators are commonly available to generate fixed
voltages of plus 3 V, and plus or minus 5 V, 9 V, 12 V, or 15 V when the load is less than
about 7 amperes.
7805 Voltage Regulator
The 7805 provides circuit designers with an easy way to regulate DC voltages to 5v.
Encapsulated in a single chip/package (IC), the 7805 is a positive voltage DC regulator that
has only 3 terminals. They are: Input voltage, Ground, Output Voltage.
Finger Print Based Security System
General Features:
Output Current up to 1A
Output Voltages of 5, 6, 8, 9, 10, 12, 15, 18, 24V
Thermal Overload Protection
Short Circuit Protection
Output Transistor Safe Operating Area Protection
Output Filter
The Filter circuit is often fixed after the Regulator circuit. Capacitor is most often
used as filter. The principle of the capacitor is to charge and discharge. It charges during the
positive half cycle of the AC voltage and discharges during the negative half cycle. So it
allows only AC voltage and does not allow the DC voltage. This filter is fixed after the
Regulator circuit to filter any of the possibly found ripples in the output received finally. Here
we used 0.1µF capacitor. The output at this stage is 5V and is given to the Microcontroller.
The output voltage overshoots when the load is removed or a short clears. When the load is
removing from a switching mode power supply with a LC low-pass output filter, the only
thing the control loop can do is stop the switching action so no more energy is taken from the
source. The energy that is stored in the output filter inductor is dumped into the output
capacitor causing a voltage overshoot.
The magnitude of the overshoot is the vector sum of two orthogonal voltages, the
output voltage before the load is removed and the current through the inductor times the
characteristic impedance of the output filter, Zo = (L/C)^1/2. This can be derived from
conservation of energy considerations.
The two energies are equal when the load is removed, since the load is no longer
taking energy from the system. Equating the two energies, substituting zero current for the
final inductor current, then the solution for the final voltage Vf is:
This is the orthogonal vector sum of the output voltage and the load current times the
characteristic impedance and is illustrated in Figure .The problem becomes worse if the
current in the inductor is established by a short circuit on the output and the short circuit
Finger Print Based Security System
clears. In this case, the initial voltage is zero (short circuit) and the overshoot is I*Zo, where I
can be very large, resulting in a ruinous overshoot.
5.3 Serial Communication
The information from micro controller is sent to system through serial communication
by using MAX-232 ic in between micro controller and RS232 DB9 connector. This MAX232 acts as voltage level translator i.e., the TTL logic voltage level is to be transformed to
RS232 DB9 connector voltage level of the system. In short a MAX –232 is nothing but a
clamper circuit, which consists of diodes and capacitors i.e., the voltage level translator. is
done through clamping circuit here diodes are inbuilt, whereas the capacitors are to be
connected externally .
Introduction
In this chapter we are going to cover basic concepts involved in the project such as
serial communication and modem activation commands. The serial communication is
between the modem and MCU and also between modem and PC.
Serial Communication
In order to connect micro controller to a modem or a pc to modem a serial port is
used. Serial is a very common protocol for device communication that is standard on almost
every PC. Most computers include two RS-232 based serial ports. Serial is also a common
communication protocol that is used by many devices for instrumentation; numerous GPIBcompatible devices also come with an RS-232 port. Furthermore, serial communication can
be used for data acquisition in conjunction with a remote sampling device
The concept of serial communication is simple. The serial port sends and receives
bytes of information one bit at a time. Although this is slower than parallel communication,
which allows the transmission of an entire byte at once, it is simpler and can be used over
longer distances. For example, the IEEE 488 specifications for parallel communication state
that the cabling between equipment can be no more than 20 meters total, with no more than 2
meters between any two devices. serial, however, can extend as much as 1200 meters.
Typically, serial is used to transmit ASCII data. Communication is completed using 3
transmission lines: (1) Ground, (2) Transmit, and (3) Receive. Since serial is asynchronous,
the port is able to transmit data on one line while receiving data on another. Other lines are
Finger Print Based Security System
available for handshaking, but are not required. The important serial characteristics are baud
rate, data bits, stop bits, and parity. For two ports to communicate, these parameters must
match.
Baud rate
It is a speed measurement for communication. It indicates the number of bit transfers
per second. For example, 300 baud is 300 bits per second. When a clock cycle is referred it
means the baud rate. For example, if the protocol calls for a 4800 baud rate, then the clock is
running at 4800Hz. This means that the serial port is sampling the data line at 4800Hz.
Common baud rates for telephone lines are 14400, 28800, and 33600. Baud rates greater than
these are possible, but these rates reduce the distance by which devices can be separated.
These high baud rates are used for device communication where the devices are located
together, as is typically the case with GPIB devices.
Data bits
A measurement of the actual data bits in a transmission. When the computer sends a
packet of information, the amount of actual data may not be a full 8 bits. Standard values for
the data packets are 5, 7, and 8 bits. Which setting choosen depends on what information
transferred? For example, standard ASCII has values from 0 to 127 (7 bits). Extended ASCII
uses 0 to 255 (8 bits). If the data being transferred is simple text (standard ASCII), then
sending 7 bits of data per packet is sufficient for communication. A packet refers to a single
byte transfer, including start/stop bits, data bits, and parity. Since the number of actual bits
depends on the protocol selected, the term packet is used to cover all instances.
Stop bits
Used to signal the end of communication for a single packet. Typical values are 1, 1.5,
and 2 bits. Since the data is clocked across the lines and each device has its own clock, it is
possible for the two devices to become slightly out of sync. Therefore, the stop bits not only
indicate the end of transmission but also give the computers some room for error in the clock
speeds. The more bits that are used for stop bits, the greater the lenience in synchronizing the
different clocks, but the slower the data transmission rate.
Finger Print Based Security System
Parity
A simple form of error checking that is used in serial communication. There are four
types of parity: even, odd, marked, and spaced. The option of using no parity is also
available. For even and odd parity, the serial port sets the parity bit (the last bit after the data
bits) to a value to ensure that the transmission has an even or odd number of logic high bits.
For example, if the data is 011, then for even parity, the parity bit is 0 to keep the number of
logic-high bits even. If the parity is odd, then the parity bit is 1, resulting in 3 logic-high bits.
Marked and spaced parity does not actually check the data bits, but simply sets the parity bit
high for marked parity or low for spaced parity. This allows the receiving device to know the
state of a bit to enable the device to determine if noise is corrupting the data or if the
transmitting and receiving device clocks are out of sync.
RS –232
RS-232 (ANSI/EIA-232 Standard) is the serial connection found on IBM-compatible
PCs. It is used for many purposes, such as connecting a mouse, printer, or modem, as well as
industrial instrumentation. Because of improvements in line drivers and cables, applications
often increase the performance of RS-232 beyond the distance and speed listed in the
standard. RS-232 is limited to point-to-point connections between PC serial ports and
devices. RS-232 hardware can be used for serial communication up to distances of 50 feet .
DB-9 pin connector
12345
6789
Pin Functions:
Data:
TxD on pin 3, RxD on pin 2
Handshake:
RTS on pin 7, CTS on pin 8, DSR on pin 6,
CD on pin 1, DTR on pin 4
Common:
Common pin 5(ground)
Other:
RI on pin 9
Finger Print Based Security System
The method used by RS-232 for communication allows for a simple connection of
three lines: Tx, Rx, and Ground. The three essential signals for 2 way RS-232
Communications are these:
TXD: carries data from DTE to the DCE.
RXD: carries data from DCE to the DTE
SG:
signal ground
Here in our project DTE is the micro controller at the remote station and PC at the
base station, DCE is the modem at both the stations. However the data to be transmitted, both
sides have to be clocking the data at the same baud rate. Even though this method is sufficient
for most applications, it is limited in being able to respond to problems such as the receiver
getting overloaded. This is where serial handshaking can help. This method uses actual
hardware lines. There are two pairs of hand shaking signals DTR/DSR and
RTS/CTS each pair has uses defined by the standard. There are several ways to
describe the state of RS-232 and other control signals. A signal with a valid positive voltage
may be described as true to indicate that it is in the active state for example when DTR is true
the data terminal is ready. to bring the signal true the controlling device raises the line. A
signal with a valid negative voltage may be described as false or ff to indicate that it’s
inactive state .for example when DTR is false, the data terminal is not ready. To bring the
signal false the controlling device lowers the line. The DTR/DSR handshake is intended for
providing information about the status of the phone line or other communications channel
connected to the modem. the terminal raises DTR to request the modem to connect to the
communication channel. In response the modem raises DSR to indicate that it is connected
.DSR is false when the modem is not connected to the communication channel or on
detecting a fault. the terminal may also raise DTR in response to RI (ring indicator) to tell the
modem to answer a call.
The RTS/CTS handshake provides additional information about whether a device is
ready to receive data. This signal pair provides a full handshake. when the terminal has data
to send ,it raises RTS (request to send). In response the modem raises CTS (clear to send) to
indicate that it is ready to receive. When the transmission is finished the terminal may lower
RTS. the modem should then be continue processing whatever data it has received and lower
CTS when it’s ready to respond to the next RTS. When RTS is false, the terminal should wait
for CTS to be false before raising RTS to request a new transmission.
Finger Print Based Security System
RI is true when a ringing signal is present on the communications channel. The signal
is true when the audible ring is present and false in the pauses between the rings .The final
control signal is the CD (carrier detect). The modem raises CD when it detects a signal of
expected frequency on the phone lines, indicating that a connection has been established to a
remote modem.
MAX232
PIN DIAGRAM OF MAX232
Fig 5.3 max232 pin diagram
This module is primary of interest for people building their own electronics with an
RS-232 interface. Off-the-shelf computers with RS-232 interfaces already contain the
necessary electronics, and there is no need to add the circuitry as described here.
Serial RS-232 (V.24) communication works with voltages (-15V ... -3V for high [sic])
and +3V ... +15V for low [sic]) which are not compatible with normal computer logic
voltages. On the other hand, classic TTL computer logic operates between 0V ... +5V
(roughly 0V ... +0.8V for low, +2V ... +5V for high). Modern low-power logic operates in the
range of 0V ... +3.3V or even lower.
So, the maximum RS-232 signal levels are far too high for computer logic electronics,
and the negative RS-232 voltage for high can't be grokked at all by computer logic.
Therefore, to receive serial data from an RS-232 interface the voltage has to be reduced, and
the low and high voltage level inverted. In the other direction (sending data from some logic
over RS-232) the low logic voltage has to be "bumped up", and a negative voltage has to be
generated, too.
Finger Print Based Security System
Table 5.3.1 Voltage levels for RS232 and TTL
All this can be done with conventional analog electronics, e.g. a particular power
supply and a couple of transistors or the once popular 1488 (transmitter) and 1489 (receiver)
ICs. However, since more than a decade it has become standard in amateur electronics to do
the necessary signal level conversion with an integrated circuit (IC) from the MAX232
family (typically a MAX232A or some clone). In fact, it is hard to find some RS-232
circuitry in amateur electronics without a MAX232A or some clone.
The MAX232 from Maxim was the first IC which in one package contains the
necessary drivers (two) and receivers (also two), to adapt the RS-232 signal voltage levels to
TTL logic. It became popular, because it just needs one voltage (+5V) and generates the
necessary RS-232 voltage levels (approx. -10V and +10V) internally. This greatly simplified
the design of circuitry. Circuitry designers no longer need to design and build a power supply
with three voltages (e.g. -12V, +5V, and +12V), but could just provide one +5V power
supply, e.g. with the help of a simple 78x05 voltage converter.
The MAX232 has a successor, the MAX232A. The ICs are almost identical, however,
the MAX232A is much more often used (and easier to get) than the original MAX232, and
the MAX232A only needs external capacitors 1/10th the capacity of what the original
MAX232 needs.
It should be noted that the MAX232(A) is just a driver/receiver. It does not generate
the necessary RS-232 sequence of marks and spaces with the right timing, it does not decode
the RS-232 signal, it does not provide a serial/parallel conversion. All it does is to convert
signal voltage levels. Generating serial data with the right timing and decoding serial data has
to be done by additional circuitry, e.g. by a 16550 UART or one of these small micro
controllers (e.g. Atmel AVR, Microchip PIC) getting more and more popular.
Finger Print Based Security System
The MAX232 and MAX232A were once rather expensive ICs, but today they are
cheap. It has also helped that many companies now produce clones (i.e. Sipex). These clones
sometimes need different external circuitry, e.g. the capacities of the external capacitors vary.
It is recommended to check the data sheet of the particular manufacturer of an IC instead of
relying on Maxim's original data sheet.
The original manufacturer (and now some clone manufacturers, too) offers a large
series of similar ICs, with different numbers of receivers and drivers, voltages, built-in or
external capacitors, etc. E.g. The MAX232 and MAX232A need external capacitors for the
internal voltage pump, while the MAX233 has these capacitors built-in. The MAX233 is also
between three and ten times more expensive in electronic shops than the MAX232A because
of its internal capacitors. It is also more difficult to get the MAX233 than the garden variety
MAX232A.A similar IC, the MAX3232 is nowadays available for low-power 3V logic.
MAX232Application
The MAX232(A) has two receivers (converts from RS-232 to TTL voltage levels)
and two drivers (converts from TTL logic to RS-232 voltage levels). This means only two of
the RS-232 signals can be converted in each direction. The old MC1488/1498 combo
provided four drivers and receivers.
Typically a pair of a driver/receiver of the MAX232 is used for TX and RX and the
second one for CTS and RTS. There are not enough drivers/receivers in the MAX232 to also
connect the DTR, DSR, and DCD signals. Usually these signals can be omitted when e.g.
communicating with a PC's serial interface. If the DTE really requires these signals either a
second MAX232 is needed, or some other IC from the MAX232 family can be used (if it can
be found in consumer electronic shops at all). An alternative for DTR/DSR is also given
below.Maxim's data sheet explains the MAX232 family in great detail, including the pin
configuration and how to connect such an IC to external circuitry. Exactly to connect the RS232 signals to the IC. So here is one possible example:
Finger Print Based Security System
MAX232 Pin Nbr. MAX232 Pin Name Signal Voltage DB9 Pin
7
T2out
CTS
RS-232 7
8
R2in
RTS
RS-232 8
9
R2out
RTS
TTL
n/a
10
T2in
CTS
TTL
n/a
11
T1in
TX
TTL
n/a
12
R1out
RX
TTL
n/a
13
R1in
RX
RS-232 2
14
T1out
TX
RS-232 3
15
GND
GND
0
5
Table 5.3.2 RS232-DB9 pin Diagram
5.4 DC Motor
Introduction
Whenever a robotics hobbyist talk about making a robot, the first thing comes to his
mind is making the robot move on the ground. And there are always two options in front of
the designer whether to use a DC motor or a stepper motor. When it comes to speed, weight,
size, cost... DC motors are always preferred over stepper motors. There are many things
which you can do with your DC motor when interfaced with a microcontroller. For example
you can control the speed of motor; you can control the direction of rotation. In this part of
tutorial we will learn to interface and control of a DC motor with a microcontroller. Usually
H‐bridge is preferred way of interfacing a DC motor. These days many IC manufacturers
have H‐bridge motor driver available in the market like L293D is most used H Bridge driver
Finger Print Based Security System
IC. H‐bridge can also be made with the help of transistors and MOSFETs etc. rather of being
cheap, they only increase the size of the design board, which is sometimes not required so
using a small 16 pin IC is preferred for this purpose.
DC Motor Driver (L293D)
L293D is a dual H-Bridge motor driver, So with one IC we can interface two DC
motors which can be controlled in both clockwise and counter clockwise direction and if you
have motor with fix direction of motion the you can make use of all the four I/Os to connect
up to four DC motors. L293D has output current of 600mA and peak output current of 1.2A
per channel. Moreover for protection of circuit from back EMF output diodes are included
within the IC. The output supply (VCC2) has a wide range from 4.5V to 36V, which has
made L293D a best choice for DC motor driver.
L293D Dual H-Bridge Motor Driver
5.4 Pin diagram of L293D Motor Driver
Finger Print Based Security System
L293D is a dual H-Bridge motor driver, so with one IC we can interface two DC
motors which can be controlled in both clockwise and counter clockwise direction and if you
have motor with fix direction Of motion. You can make use of all the four I/Os to connect
up to four DC motors. L293D has output current of 600mA and peak output current of 1.2A
per channel. Moreover for protection of circuit from back EMF output diodes are included
with in the IC. The output supply(VCC2) has a wide range from 4.5V to 36V,which has made
L293D a best choice for DC motor driver.
A simple schematic for interfacing a DC motor using L293D is shown below.
Figure DC Motor Driver
Finger Print Based Security System
6. SOFT WARE REQUIREMENTS
Keil an ARM Company makes C compilers, macro assemblers, real-time
kernels, debuggers, simulators, integrated environments, evaluation boards, and emulators for
ARM7/ARM9/Cortex-M3, XC16x/C16x/ST10, 251, and 8051 MCU families.
The Keil 8051 Development Tools are designed to solve the complex problems facing
embedded software developers
Keil development tools for the 8051 Microcontroller Architecture support every
level of software developer from the professional applications engineer to the student just
learning about embedded software development.
When starting a new project, simply select the microcontroller you use from the
Device Database and the µVision IDE sets all compiler, assembler, linker, and memory
options for you.
Numerous example programs are included to help you get started with the most
popular embedded 8051 devices.
The Keil µVision Debugger accurately simulates on-chip peripherals (I²C, CAN,
UART, SPI, Interrupts, I/O Ports, A/D Converter, D/A Converter, and PWM Modules) of
your 8051 device. Simulation helps you understand hardware configurations and avoids time
wasted on setup problems. Additionally, with simulation, you can write and test applications
before target hardware is available
EMBEDDED ‘C’:
Ex: Hitec – c, Keil – c
HI-TECH Software makes industrial-strength software development tools and C
compilers that help software developers write compact, efficient embedded processor code.
For over two decades HI-TECH Software has delivered the industry's most reliable
embedded software development tools and compilers for writing efficient and compact code
to run on the most popular embedded processors. Used by tens of thousands of customers
including General Motors, Whirlpool, Qualcomm, John Deere and many others, HI-TECH's
Finger Print Based Security System
reliable development tools and C compilers, combined with world-class support have helped
serious embedded software programmers to create hundreds of breakthrough new solutions.
Which ever embedded processor family you are targeting with your software, whether it is
the ARM, PICC or 8051 series, HI-TECH tools and C compilers can help you write better
code and bring it to market faster. HI-TECH PICC is a high-performance C compiler for the
Microchip PIC micro 10/12/14/16/17 series of microcontrollers. HI-TECH PICC is an
industrial-strength ANSI C compiler - not a subset implementation like some other PIC
compilers. The PICC compiler implements full ISO/ANSI C, with the exception of recursion.
All data types are supported including 24 and 32 bit IEEE standard floating point. HI-TECH
PICC makes full use of specific features and using an intelligent optimizer, can generate
high-quality code easily rivaling hand-written assembler. Automatic handling of page and
bank selection frees the programmer from the trivial details of assembler code.
EMBEDDED “C” COMPILER
ANSI C - full featured and portable.
Reliable - mature, field-proven technology.
Multiple C optimization levels .
An optimizing assembler.
Full linker, with overlaying of local variables to minimize RAM usage.
Comprehensive C library with all source code provided.
Includes support for 24-bit and 32-bit IEEE floating point and 32-bit
long data types.
Mixed C and assembler programming.
Unlimited number of source files.
Listings showing generated assembler.
Compatible - integrates into the MPLAB IDE, MPLAB ICD .
Runs on multiple platforms: Windows, Linux, UNIX, Mac OS X,
Solaris.
Finger Print Based Security System
EMBEDDED SYSTEM TOOLS
ASSEMBLER
An assembler is a computer program for translating assembly language — essentially,
a mnemonic representation of machine language — into object code. A cross assembler (see
cross compiler) produces code for one type of processor, but runs on another. The
computational step where an assembler is run is known as assembly time. Translating
assembly instruction mnemonics into opcodes, assemblers provide the ability to use symbolic
names for memory locations (saving tedious calculations and manually updating addresses
when a program is slightly modified), and macro facilities for performing textual substitution
typically used to encode common short sequences of instructions to run inline instead of in a
subroutine. Assemblers are far simpler to write than compilers for high-level languages.
ASSEMBLY LANGUAGE HAS SEVERAL BENEFITS
Speed: Assembly language programs are generally the fastest programs around.
Space: Assembly language programs are often the smallest.
Capability: You can do things in assembly which are difficult or impossible in High
level
languages.
Knowledge: Your knowledge of assembly language will help you write better
programs, even when using High level languages. An example of an assembler we use in our
project is RAD 51.
SIMULATOR
Simulator is a machine that simulates an environment for the purpose of training or
research. We use a UMPS simulator for this purpose in our project.
UMPS
Universal microprocessor program simulator simulates a microcontroller with its
external environment. UMPS is able to simulate external components connected to the
microcontroller. Then, debug step is dramatically reduced. UMPS is not dedicated to only
Finger Print Based Security System
one microcontroller family, it can simulate all kind of microcontrollers. The main limitation
is to have less than 64K-Bytes of RAM and ROM space and the good microcontroller library.
UMPS provide all the facilities other low-cost simulator does not have. It offers the user to
see the "real effect" of a program and a way to change the microcontroller family without
changing IDE. UMPS provide a low-cost solution to the problems. UMPS is really the best
solution to your evaluation.
UMPS KEY FEATURES
The speed, UMPS can run as fast as 1/5 the real microcontroller speed. No need to
wait 2 days to see the result of a LCD routine access. All the microcontroller parts are
simulated, interrupts, communication protocol, parallel handshake, timer and so on. UMPS
have an integrated assembler/disassembler and debugger. It is able to accept an external
assembler or compiler. It has a text editor which is not limited to 64K-bytes and shows
keyword with color. It can also communicate with an external compiler to integrate all the
debug facilities you need. UMPS is universal, it can easily be extended to other
microcontroller with a library. Ask us for toolkit development. External resource simulation
is not limited. It can be extended to your proper needs by writing your own DLL. UMPS
allows you to evaluate at the lowest cost the possibility to build a microcontroller project
without any cable. - UMPS include a complete documentation on each microcontroller which
describe special registers and each instruction.
USER INTERFACES
User interfaces for embedded systems vary widely, and thus deserve some special
comment. User interface is the ultimate aim for an embedded module as to the user to check
the output with complete convenience. One standard interface, widely used in embedded
systems, uses two buttons (the absolute minimum) to control a menu system (just to be clear,
one button should be "next menu entry" the other button should be "select this menu entry").
Another basic trick is to minimize and simplify the type of output. Designs sometimes
use a status light for each interface plug, or failure condition, to tell what failed. A cheap
variation is to have two light bars with a printed matrix of errors that they select- the user can
glue on the labels for the language that he speaks. For example, most small computer printers
use lights labeled with stick-on labels that can be printed in any language. In some markets,
Finger Print Based Security System
these are delivered with several sets of labels, so customers can pick the most comfortable
language.
In many organizations, one person approves the user interface. Often this is a
customer, the major distributor or someone directly responsible for selling the system.
PLATFORM
There are many different CPU architectures used in embedded designs such as ARM,
MIPS, Coldfire/68k, PowerPC, X86, PIC, 8051, Atmel AVR, H8, SH, V850, FR-V, M32R
etc.
This in contrast to the desktop computer market, which as of this writing (2003) is
limited to just a few competing architectures, mainly the Intel/AMD x86, and the
Apple/Motorola/IBM PowerPC, used in the Apple Macintosh. With the growing acceptance
of Java in this field, there is a tendency to even further eliminate the dependency on specific
CPU/hardware (and OS) requirements.
Standard PC/104 is a typical base for small, low-volume embedded and ruggedized
system design. These often use DOS, Linux or an embedded real-time operating system such
as QNX or Inferno.
A common configuration for very-high-volume embedded systems is the system on a
chip, an application-specific integrated circuit, for which the CPU was purchased as
intellectual property to add to the IC's design. A related common scheme is to use a fieldprogrammable gate array, and program it with all the logic, including the CPU. Most modern
FPGAs are designed for this purpose.
TOOLS
Like typical computer programmers, embedded system designers use compilers,
assemblers, and debuggers to develop embedded system software. However, they also use a
few tools that are unfamiliar to most programmers.
Software companies that specialize in the embedded market Ported from the GNU
software development tools. Sometimes, development tools for a personal computer can be
used if the embedded processor is a close relative to a common PC processor. Embedded
system designers also use a few software tools rarely used by typical computer programmers.
Finger Print Based Security System
One common tool is an "in-circuit emulator" (ICE) or, in more modern designs, an
embedded debugger. This debugging tool is the fundamental trick used to develop embedded
code. It replaces or plugs into the microprocessor, and provides facilities to quickly load and
debug experimental code in the system. A small pod usually provides the special electronics
to plug into the system. Often a personal computer with special software attaches to the pod
to provide the debugging interface.
Another common tool is a utility program (often home-grown) to add a checksum or
CRC to a program, so it can check its program data before executing it.
An embedded programmer that develops software for digital signal processing often
has a math workbench such as MathCad or Mathematical to simulate the mathematics.
Less common are utility programs to turn data files into code, so one can include any
kind of data in a program. A few projects use Synchronous programming languages for extra
reliability or digital signal processing.
DEBUGGING
Debugging is usually performed with an in-circuit emulator, or some type of debugger
that can interrupt the microcontroller's internal microcode. The microcode interrupt lets the
debugger operate in hardware in which only the CPU works. The CPU-based debugger can
be used to test and debug the electronics of the computer from the viewpoint of the CPU.
This feature was pioneered on the PDP-11.
As the complexity of embedded systems grows, higher level tools and operating
systems are migrating into machinery where it makes sense. For example, cell phones,
personal digital assistants and other consumer computers often need significant software that
is purchased or provided by a person other than the manufacturer of the electronics. In these
systems, an open programming environment such as Linux, OSGi or Embedded Java is
required so that the third-party software provider can sell to a large market.
OPERATING SYSTEM
Embedded systems often have no operating system, or a specialized embedded
operating system (often a real-time operating system), or the programmer is assigned to port
one of these to the new system.
Finger Print Based Security System
BUILT- IN SELF- TEST
Most embedded systems have some degree or amount of built-in self-test.
There are several basic types.
1. Testing the computer.
2. Test of peripherals.
3. Tests of power.
4. Communication tests.
5. Cabling tests.
6. Rigging tests.
7. Consumables test.
8. Operational test.
Finger Print Based Security System
7. CODE GENERATION
#include<reg52.h>
#include<lcd.h>
#include<serial.h>
#include<string.h>
sbit SW
= P3^7;
sbit motor1 = P2^0;
unsigned char D[20];
unsigned char i,value;
bit flag;
void Disp_Hex(unsigned char);
void FINGER_FUN_IDT();
void serial(void ) interrupt 4
{
if (RI)
{
D[i] = SBUF;
if (i>15){flag=1;}
else i++;
}
}
void main()
{
bit scan_flag;
// finger identification
Finger Print Based Security System
SConfig();
scan_flag=0;motor1= 0;
LCD_Init();
LCD_Cmd(0x80);
Disp_Str(" WELCOME
");
Delay(50);clear();
LCD_Cmd(0x80);
Disp_Str(" finger print ");
LCD_Cmd(0xC0);
Disp_Str(" BASED PROJECT ");
Delay(100);
LCD_Cmd(0x80);
Disp_Str(" PRESS SWITCH ");
while(1)
// infinite loop
{
LCD_Cmd(0x80);Disp_Str(" PRESS SWITCH ");
if (SW==0) //scanning switch
{
FINGER_FUN_IDT();
EA=1;ES=1;
Delay(300);
}
if (flag==1)
{
//command identify function
Finger Print Based Security System
flag=0;
if (D[12] == 0x00 && D[13] == 0x00 && D[14] == 0x00)
{
scan_flag=1;
LCD_Cmd(0x80);
Disp_Str("
VALID
");
LCD_Cmd(0xC0);
Disp_Str("
PERSON1
");
}
else if (D[12] == 0x00 && D[13] == 0x00 && D[14] == 0x01)
{
scan_flag=1;
LCD_Cmd(0x80);
Disp_Str("
VALID
");
LCD_Cmd(0xC0);
Disp_Str("
PERSON2
");
}
else if (D[12] == 0x00 && D[13] == 0x00 && D[14] == 0x02)
{
scan_flag=1;
LCD_Cmd(0x80);
Disp_Str("
VALID
");
LCD_Cmd(0xC0);
Disp_Str("
}
else if (D[12] == 0x02)
PERSON3
");
Finger Print Based Security System
{
LCD_Cmd(0xC0);
Disp_Str("NO F.P ON SENSOR");
}
else if (D[12] == 0x09)
{
LCD_Cmd(0xC0);
Disp_Str("NO F.Pwere FOUND");
}
EA=ES=0;
}
if (scan_flag==1)
{
Delay(100);
LCD_Cmd(0x80);
Disp_Str(" DOOOR OPEN ");
motor1=0;
Delay(600);
LCD_Cmd(0x80);
Disp_Str(" DOOR CLOSED ");
motor1=1;
Delay(600);
motor1=0;
}
}
//infinite loop end
Finger Print Based Security System
}
// main loop end
void FINGER_FUN_IDT()
{
Send_Char(0xEF);Send_Char(0x01);
Send_Char(0xFF);Send_Char(0xFF);Send_Char(0xFF);Send_Char(0xFF);
Send_Char(0x01);
Send_Char(0x00);Send_Char(0x03);
Send_Char(0x01);
Send_Char(0x00);Send_Char(0x05);
}
Finger Print Based Security System
8.CONCLUSION
The project has been successfully implemented. In conclusion, ”FINGER PRINT
BASED SECURITY SYSTEM” is used to provide security and authentication for an
organization using finger prints as forgery of that is not possible. The project report began
with the introduction to the basic functioning of Microcontroller based Identification,
Authentication and Setup of Security system.
Project deals with Microcontroller as central controlling units for various other
sections like Biometrics FIM 3030 module, LCD etc. Interfacing between all sections
required for system and microcontroller 89S52 has been done successfully. For registration
interfacing between biometrics module and personal computer has also been done
successfully. When a new person who is not register with the system try to have access,
system refuses access and displays message “Unidentified FP”. For the person who is
registered with the system can get access through doors according to their designation. Doors
opening and closing has been achieved successfully.
Finger Print Based Security System
9. FUTURE SCOPE
In this project we are using fingerprint module. It is most widely used for security
purposes. This project is depend on the biometrics i.e fingerprint. It is very easy to implement
because Each person has his own fingerprints with the permanent uniqueness. Compare to
normal security system it is better and in this we can further to implement in every office that
module contains total information of employes.
When a finger is kept at the finger print reader, it will give the information
accordingly to microcontroller by sending appropriate commands to the reader. If the
information matches with the one within the device then the DC motor interfaced to the
microcontroller responds accordingly. And if the information provided by the user is
incorrect or mismatch in finger prints is detected then access is denied. Finger print reader
and the microcontroller unit are connected using serial interface.
In future this system is used to provide security and authentication for an organization
using finger prints as forgery of that is not possible.
Finger Print Based Security System
10. BIBLIOGRAPHY
NAME OF THE SITES
www.at89s52.com/pdf/
www.microchips.com
www.max232n.com/texas
www.mikroelektronika.co.yu/english/product/books/PICbook/0_Uvod.
www.wikipedia.com
www.atmel.databook.com
BOOKS
Customizing and programming microcontroller-Myke Predcko-TMH publication2000
FIM30 user manual.
C programming for embedded systems- Kirk Zurell
“8051 and embedded system” by Mazid and Mazidi
Embedded Microcomputer system- onathan w.Valvano PHI publication2000
microcontroller inter facing-
Douglas v.hall TMH publication-2000