Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Buck converter wikipedia , lookup
Electric motor wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Transmission line loudspeaker wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Phone connector (audio) wikipedia , lookup
Flip-flop (electronics) wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Schmitt trigger wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Induction motor wikipedia , lookup
Stepper motor wikipedia , lookup
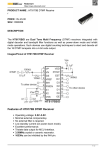
MOBILE CONTROLLED ROBOT INTRODUCTION: DTMF Mobile controlled ROBOT is a machine that can be controlled with a mobile. In this project, the robot is controlled by a mobile phone that makes a call to the mobile phone attached to the robot. In the course of a call, if any button is pressed, a tone corresponding to the button pressed is heard at the other end of the call. This tone is called "Dual Tone Multiple-Frequency" (DTMF) tone. The robot perceives this DTMF tone with the help of the phone stacked on the robot. The received tone is processed by the microcontroller with the help of DTMF decoder. The microcontroller then transmits the signal to the motor driver ICs to operate the motors & the robot moves accordingly. Use of a mobile phone for robotic control can overcome these limitations. It provides working range as large as the coverage area of the service provider. DTMF Technology: DTMF stands for Dual Tone - Multi Frequency and it is the basis for telephone system. DTMF is the generic term for Touch-Tone.Dual-tone multi-frequency (DTMF) signaling is used for telecommunication signaling over analog telephone lines in the voice-frequency band between telephone handsets and other communications devices and the switching center. The DTMF telephone keypad is laid out in a 4×4 matrix of push buttons in which each row represents the low frequency component and each column represents the high frequency component of the DTMF signal. Pressing a key sends a combination of the row and column frequencies. For example, the key 1 produces a superimposition of tones of 697 and 1209 hertz (Hz). Initial pushbutton designs employed levers, so that each button activated two contacts. The tones are decoded by the switching center to determine the keys pressed by the user.DTMF tones are able to represent one of the 16 different states or symbols on the keypad. This is equivalent to 4 bits of data, also known as nibble. Table showing DTMF Low and High frequency tones and decoded output: MT8870 DTMF Decoder IC: The MT8870 is a complete DTMF receiver integrating both the bandsplit filter and digital decoder functions. The filter section uses switched capacitor techniques for high and low group filters; the decoder uses digital counting techniques to detect and decode all 16 DTMF tonepairs into a 4-bit code. The MT8870 monolithic DTMF receiver offers small size, low power consumption and high performance. Its architecture consists of a bandsplit filter section, which separates the high and low group tones, followed by a digital counting section which verifies the frequency and duration of the received tones before passing the corresponding code to the output bus. ATMEGA16 Microcontroller: ATmega16 is an 8-bit high performance microcontroller of Atmel’s Mega AVR family with low power consumption. Atmega16 is based on enhanced RISC (Reduced Instruction Set Computing) architecture with 131 powerful instructions. Most of the instructions execute in one machine cycle. Atmega16 can work on a maximum frequency of 16MHz.ATmega16 has 16 KB programmable flash memory. ATmega16 is a 40 pin microcontroller. There are 32 I/O (input/output) lines which are divided into four 8-bit ports designated as PORTA, PORTB, PORTC and PORTD. Each port on a tiny or mega AVR drives up to eight pins and is controlled by three 8-bit registers: DDRx, PORTx and PINx, where x is the port identifier. DDRx: Data Direction Register, configures the pins as either inputs or outputs. PORTx: Output port register. Sets the output value on pins configured as outputs. Enables or disables the pull up resistor on pins configured as inputs. PINx: Input register, used to read an input signal. On some devices (but not all, check the datasheet), this register can be used for pin toggling: writing a logic one to a PINx bit toggles the corresponding bit in PORTx, irrespective of the setting of the DDRx bit. L293D Motor driver IC: L293D is a dual H-bridge motor driver integrated circuit (IC). Motor drivers act as current amplifiers since they take a low-current control signal and provide a higher-current signal. This higher current signal is used to drive the motors. L293D contains two inbuilt H-bridge driver circuits. In its common mode of operation, two DC motors can be driven simultaneously, both in forward and reverse direction. The motor operations of two motors can be controlled by input logic at pins 2 & 7 and 10 & 15. Input logic 00 or 11 will stop the corresponding motor. Logic 01 and 10 will rotate it in clockwise and anticlockwise directions, respectively. Enable pins 1 and 9 (corresponding to the two motors) must be high for motors to start operating. When an enable input is high, the associated driver gets enabled. As a result, the outputs become active and work in phase with their inputs. Similarly, when the enable input is low, that driver is disabled, and their outputs are off and in the high-impedance state. Pin No Function Name 1 Enable pin for Motor 1; active high Enable 1,2 2 Input 1 for Motor 1 Input 1 3 Output 1 for Motor 1 Output 1 4 Ground (0V) Ground 5 Ground (0V) Ground 6 Output 2 for Motor 1 Output 2 7 Input 2 for Motor 1 Input 2 8 Supply voltage for Motors; 9-12V (up to 36V) Vcc 2 9 Enable pin for Motor 2; active high Enable 3,4 10 Input 1 for Motor 1 Input 3 11 Output 1 for Motor 1 Output 3 12 Ground (0V) Ground 13 Ground (0V) Ground 14 Output 2 for Motor 1 Output 4 15 Input2 for Motor 1 Input 4 16 Supply voltage; 5V (up to 36V) Vcc 1 BLOCK DIAGRAM: CIRCUIT DIAGRAM: WORKING: 1. 2. 3. 4. 5. Connect the cell phone to circuit through audio jack. Call the cell phone from a remote phone. Press numbers on the keypad in the course of the call. Now DTMF tones are sent by remote phone to the circuit The Decoder IC decodes the tone and send equivalent binary number to the microcontroller. 6. Robot will work according to the program set in the microcontroller. FUTURE SCOPES: ● IR Sensors: IR sensors can be used to automatically detect & avoid obstacles if the robot goes beyond line of sight. This avoids damage to the vehicle if we are maneuvering it from a distant place. ● Password Protection: Project can be modified in order to password protect the robot so that it can be operated only if correct password is entered. Either cell phone should be password protected or necessary modification should be made in the assembly language code. This introduces conditioned access & increases security to a great extent. ● Alarm Phone Dialer: By replacing DTMF Decoder IC MT8870 by a 'DTMF Transceiver IC’ MT8880, DTMF tones can be generated from the robot. So, a project called 'Alarm Phone Dialer' can be built which will generate necessary alarms for something that is desired to be monitored (usually by triggering a relay). For example, a high water alarm, low temperature alarm, opening of back window, garage door, etc. When the system is activated it will call a number of programmed numbers to let the user know the alarm has been activated. This would be great to get alerts of alarm conditions from home when user is at work. ● Adding a Camera: If the current project is interfaced with a camera (e.g. a Webcam) robot can be driven beyond line-of-sight & range becomes practically unlimited as GSM networks have a very large range. CONCLUSION Thus the robot was built using DTMF technology.All irregularities were checked then tested and found to have a satisfactory output. The construction was carried out with care. The precautions were taken during the soldering.As stated above this system can be further improvised to carry out more advanced tasks and operations.