Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
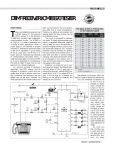
Introduction •Today we are going to study GSM controlled robots. This is a robot which can be controlled by using cell phone. •Later on we can build application like controlling the electricity of a building with a cell phone using same development board. • What is DTMF? • How to control a robot using DTMF? • DTMF Keypad table • HT9170B IC • Application Circuit • Sample Code You can use this system in robotics for controlling robots remotely. It can be considered as an infinitely long range remote control of your robot. Limitations •Availability of network connectivity. •Portability of errors id very high due to unreliability. • DTMF signaling is used for telecom signaling over analog telephone lines in the voice frequency band between telephone handsets and other communication devices and the switching centre. • In other words DTMF is a method of instructing switching system of the telephone numbers to be dialed, or to issue commands to switching systems. • DTMF table is laid out in 4*4 matrix. • Row represents low frequency . • Column represents high frequency. • The multiple tones are the reason for calling the system multi frequency. • Tones are then decoded by switching centers to determine which keys are pressed. • Operating voltage : 2.5V – 5.5V • Minimal external components • No external filter required • Excellent performance • 3.58 crystal or ceramic resonator • 18 pin package • Tone is attached to 0.1 micro F capacitor on the top corner. • Mount the circuit on the robot with auto answer mode on. • Connect one wire of the headphone to the wire and other to the ground. • The tone is then passed to amplifier for filtering. • OE is the output enable pin, high on this pin will enable the output . • D0,D1,D2 and D3 are the decoded output of the IC. ……continued. • DV is data valid pin, it’s a output pin, Set to high itself by IC when valid data is available on these bits. • RT/GT and EST are pins for setting effective time duration of tone to check for authenticity. • Connect the cell phone to circuit. • Call the cell phone from a remote phone • Now press the keys on the remote phone and you will see the LED’s blinking. • Connect d0,d1,d2,d3 to Port C0,C1,C2,C3. • Now we can check respective bits with programming and respond based on the bit pattern received. • Now based on the input pattern we can instruct the motor with specific commands and make the robot move in different directions. Thank You…