Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
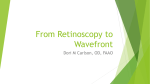
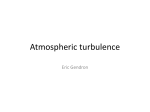
Branch point detection and correction using the branch point potential method Kevin Murphy, Ruth Mackey and Chris Dainty Applied Optics Group, Department of Physics, National University of Ireland, Galway, Galway, Ireland; ABSTRACT Branch points have been shown to cause problems for adaptive optics (AO) systems which attempt to correct for atmospheric distortion over mid-to-long range horizontal paths. Where branch points (or singularities) occur, the phase of the optical wavefront is undefined and cannot be reconstructed by conventional wavefront reconstruction techniques. Branch points occur in pairs of opposite sign (or rotation) and are joined by wavefront dislocations called branch cuts, which have a 2π jump in phase across them. The aim of the project is to construct a branch point sensitive wavefront reconstructor using a Shack Hartmann wavefront sensor which can be used on a 3km line-of-sight (LOS) free space optical (FSO) communications system currently being tested within our group. The first step in our method is to detect the positions of singularities using the branch point potential method first proposed by LeBigot and Wild.1 The most common zonal reconstruction method used (the least squares reconstructor) is not sensitive to branch points and different methods are being investigated for this part of the project. Results for the detection of singularities using the branch point potential method in simulations are shown here. Some early results for the reconstruction of branch point affected wavefronts are also presented. Keywords: Branch points, adaptive optics, Shack Hartmann, wavefront reconstruction 1. INTRODUCTION Branch points occur in an optical wavefront when it is heavily distorted or the interference is such that zeros of intensity are seen at the plane of the receiver. At these nulls of intensity, the phase of the optical wavefront is undefined and it is at these positions that branch points are formed. Branch points occur in pairs (which are of opposite rotation or sign) and are connected by wave dislocations called branch cuts. Along these branch cuts the phase of the wavefront undergoes a 2π jump. The branch point is at the origin of the 2π discontinuity that causes these wave dislocations. Due to branch points the phase of the optical wavefront at the receiver is not continuous and this causes difficulties in adaptive optics (AO) systems in strong turbulence. Nye and Berry observed branch points as early as 19742 due to interference caused by certain types of scattering. A paper by Baranova et al. in 19833 highlighted some of the problems that branch points may cause AO systems, mainly because of the fact that it would be extremely difficult for a continuous plate deformable mirror to correct for them. Fried and Vaughn4 explained and quantified the existence of branch points in the phase function. The authors explained that branch points (and their associated branch cuts) were unavoidable when the intensity of the light dropped to zero at the cross-section of the receiver. Their suggestion to take care of branch points was to first find the branch point locations, then form the branch cuts so that they are ‘tucked away’ into regions of low intensity and then to reconstruct the phase function around them by using a path dependent least-squares method which never crosses a branch cut. This method was deemed to be too slow and impractical due to difficulties in the pairing up of branch points to form branch cuts. The authors also used an intensity weighted least-squares multigrid method that does not rely on identifying branch points or positioning branch cuts. It should also be noted that the contour sum method for detecting branch points was outlined in this paper. Other papers have indicated that using a different branch point corrector, such as an exponential or multigrid reconstructor, would be better when reconstructing the phase function.5,6 (Send correspondence to Kevin Murphy) E-mail: [email protected]: Telephone: +353 (0)91492824 A reconstructor capable of detecting and positioning branch points correctly should be able to calculate the hidden phase and correct for any errors caused by branch points. It is easy to see the benefit that such a reconstructor would have for an AO system in strong turbulence. It could be either used in conjunction with, or instead of, the least-squares reconstructor to retrieve the original wavefront phase. It is because of the inability of the least-squares reconstructor to detect branch points that others have suggested using direct wavefront sensing methods such as point-diffraction interferometry to obtain the phase information of the wavefront.7,8 The aim of this project is to use a branch point sensitive reconstructor in real time with a line-of-sight (LOS) free space optical (FSO) communications system and to take account of the distortions introduced by atmospheric turbulence. Typically such an AO communications system would be equipped with a laser beam which propagates on a horizontal path close to the Earth’s surface, which experiences heavy distortion and is highly scintillated. At present the system that is being implemented by our group is designed for a 3km LOS FSO communications link over Galway city.9 It has a laser beacon at one end on top of a seven storey building and a receiver at the other end in the AO laboratory. The receiver set up consists of a Cassegrain telescope with a central obscuration and uses a Shack Hartmann wavefront sensor to measure the aberrations of the wavefront. It has been found that to correct for these aberrations it is necessary for the AO system to operate at a frame rate of at least 1 kHz. Scintillation is the fluctuation in the irradiance at the receiver caused by focusing and defocusing, as well as interference effects, due to turbulent atmospheric cells of different refractive index. Scintillation makes wavefront sensing difficult and this is examined more closely for the Shack Hartmann (SH) wavefront sensor (wfs) in a paper by Barchers et. al.10 It is due to the strong scintillation that nulls of intensity (and the associated branch points) which form in the cross-section of the receiver are introduced. It has been shown that branch points are one of the main factors which significantly degrade the performance of an adaptive optics system propagating through strong turbulence.11 1.1 Least Squares Reconstruction There are a number of problems that branch points specifically cause for AO systems in strong turbulence. The first of these, as mentioned earlier, is that it is very difficult to correct for them by using a single DM with a continuous faceplate. It has been suggested to split the correction over two different mirrors12 but the most common solution has been to used a single segmented DM. This has the advantage of being able to create a discontinuous phase function as well as cutting down on system complexity. The second major problem is the inability of the most common reconstructors to identify the branch cuts. The least squares reconstructor cannot detect the presence of branch points and therefore it cannot correct for their aberrations. Fried shows why it fails to identify the branch points positions in a paper in 1998.13 If the phase gradients s calculated by the wavefront sensor are given by s = Aφ (1) where A is the geometry matrix which relates the phase values to the slope values and φ are the phase values of the wavefront, then the least squares reconstruction of the phase φlmse is φlmse = ((A† A)−1 A† )s (2) The hidden phase is the part of the total phase not accounted for by the least-squares reconstructor and is the part of the phase which is discontinuous. It is a concept that was introduced by Fried13 and can be defined as: ∇φ = ∇φlmse + ∇φhid (3) where ∇φ is the gradient of the phase of the field, ∇φlmse is the gradient of the least-squares phase and ∇φhid is the gradient of the hidden phase. Fried13 gave an equation for the hidden phase due to a single branch point rbp at the position (xbp , ybp ): φhid (r) = Im{± log[(x − xbp ) + i(y − ybp )]} (4) The hidden phase is the part of the phase which is equal to the curl of the vector potential (the least-squares reconstructor only calculates over the scalar potential): ∇φhid = ∇ × H(r) (5) where the H(r) mentioned above is the Hertz potential, which is defined as: H(r) = [0, 0, h(r)] (6) where h(r) is the Hertz function, which has no x- or y-components, only a z-component. It should be noted here that although the curl component of the phase is not visible through the least-squares method directly it can be shown by finding the slope discrepancy. If slopes are taken directly from a wavefront sensor and reconstructed using the least-squares method a reconstructed wavefront will be formed. If slopes are then found numerically from the reconstructed wavefront and compared to the original slopes taken directly from the wavefront sensor they are found to be different. The difference between these two sets of slope values is called the slope discrepancy. If the system was completely noise free the slope discrepancy would equal the curl component of the phase; however in any normal system there is also a large amount of noise and fitting errors which have been filtered out by the least squares reconstruction. Further discussion on this topic can be found in a paper by Tyler.14 1.2 Branch Point Detection There are different methods used to detect the positions of branch points in the phase function with the most common probably being the contour sum method originally proposed by Fried in 1992.4 This involves the summing of phase gradients calculated from the wavefront sensor around in a closed loop. The overall sum should be equal to zero if the phase is continuous i.e. no branch points present or if there are two branch points of opposite sign enclosed which cancel each other out. If the addition around this closed loop is equal to a multiple of either ±2π then there is a branch point enclosed in the loop. The sign of the ±2π depends on the rotation of the branch point’s screw type discontinuity. The detection of branch points is also subject to the sampling resolution and too low of a resolution will mean that some discontinuities are missed. The sum of phase differences around a closed loop can be described mathematically by the following equation: X (i, j) = −∆x (i, j) − ∆y (i + 1, j) + ∆x (i, j + 1) + ∆y (i, j) (7) where ∆x () are the horizontal phase differences and ∆y () are the vertical phase differences. By convention the (i,j) pixel is the top left of the four pixels and the branch point is placed there as a more exact position of the branch point cannot be established by this method. The contour sum method has been extended to be used with the least-squares technique by utilising the slope discrepancy by Tyler.14 However the slope discrepancy is still subject to significant noise as the noise and fitting error terms which are filtered out by the least-squares method are included in the slope discrepancy gradients. The overall robustness of the contour sum method is still uncertain under noise conditions (which are often experienced under strong turbulence).15,16 It has been suggested to use multi-grid or exponential reconstructors to correct for the presence of branch cuts without explicitly finding the location of the branch points.5,14 Another method for detection of discontinuities first proposed by LeBigot and Wild in 199916,1 is called the branch point potential method. This involves rotating all the phase gradient values calculated from the wavefront sensor by 90 degrees and then forming a potential plot of the resultant field. This is done by first performing a simple matrix multiplication to rotate the slopes: sy 0 1 (8) (Rπ/2 ) ∗ (s) = ∗ (s) = −1 0 −sx where (Rπ/2 ) is a 90 degree rotation, s are the slope values measured by the wavefront senor with sx and sy the slopes x-values and y-values respectively. Then the pseudo-inverse of the geometry matrix is calculated: A0 = (A† A + m2 )−1 A† (9) where A† is the adjoint of the geometry matrix and the m2 value is inserted to prevent the matrix from becoming singular. V = (A0 )(Rπ/2 s) (10) The above least-squares calculation is then performed on the rotated slopes to give a potential function, V, which can be reshaped to form a potential plot which gives the position of the branch point. This potential function is able to see the hidden phase, unlike a straightforward least-squares reconstruction, because it is the Hertz potential discussed above. The branch points will show up in this field as peaks and valleys in the potential plot (with the positive branch points as the peaks and the negative ones as the valleys). By using a threshold value the branch points are identified because if the potential peaks (or troughs) above (or below) this value then the position is said to be a branch point location. At the moment the threshold value is chosen heuristically with an attempt to avoid the most noise but still detect the most branch points. This is the method which we are using in our current project. It is hoped that this branch point potential method will be more robust to noise than the contour sum method and be fast enough to be able to correct for the singularities at high speed. 2. SIMULATION OF ATMOSPHERIC TURBULENCE 2.1 Initial Simulations Initial simulations were run to test the basic implementation of the branch point potential (BPP) method and these entailed creating a branch point in a known position in an otherwise perfectly flat phase function. It’s position and sign would then be measured by the BPP method and if it corresponded to the inputted branch point information the BPP method could be considered sound. A branch point is created by first obtaining a product wavefunction: Ψ= Y {(X − Xi ) + i(Y − Yi )} Q = atan2 Im {Ψ} Re {Ψ} (11) (12) with Q being the resulting phase and X and Y are the coordinates of an array on a cartesian grid and Xi and Yi defining the positions of the zero crossings. Y It is at the zero crossing where the discontinuity is created because the function atan2 X is undefined when Y = 0 and X = 0. This corresponds to having a phase field with a point where the phase is undefined (i.e. a branch point). These initial simulations proved encouraging as the position and rotation of the branch points given by the BPP method were as expected. However these simulations are unrealistic as they assume an otherwise flat phase field apart from the branch point which is unlikely to happen due to atmospheric turbulence. In the next set of simulations normally distributed random noise with a mean of 0 and a standard deviation of 0.3 was added to all the slope values previously generated before they were rotated. The spread of slope values generated had a similar mean (-0.0041) and standard deviation(0.297) to the noise added. The addition of reasonable amounts of noise did not seem to overly affect the BPP method in detecting singularities which would seem to support LeBigot and Wild’s assertion that it performs well under heavy noise conditions. 2.2 Numerical Simulation of Propagation Through the Atmosphere The next step was to create a more realistic numerical simulation of atmospheric turbulence to examine more throughly how the branch point potential method would perform under actual experimental conditions. This was achieved by creating phase screens using Kolmogorov statistics to mimic the turbulence encountered through the atmosphere. A simulated light source was then passed through a number of these phase screens with the propagation between the phase screens approximated by multiplying the Fresnel transfer function by the Fourier transform of the optical field. The number of phase screens used to generate the atmospheric turbulence was 10 with the wavelength (633nm), propagation distance (3km), grid size (256) and pixel size (2mm) all staying constant. The Fresnel transfer function H(kx , ky ) can be defined as: H(kx , ky ) = exp iπzλ(kx2 + ky2 ) (13) with kx and ky the spatial frequencies in the x and y directions, z being the propagation distance and λ being the wavelength of the light source propagated. Figure 1. Diagram showing how the numerical simulation of propagation through the atmosphere was performed. This method was used to create a number of input phases for use with the BPP method to test for branch points. There was varying degrees of turbulence strength developed from relatively mild turbulence to strong turbulence. The strength was measured by the Rytov variance where a turbulence of >1 is considered strong turbulence. The phase screens generated had a Rytov variance of between 1 and 6. The Rytov variance is defined by the following formula: 7 11 2 σR = 1.23(Cn2 )(k 6 )(L 6 ) (14) 2 where k is the wavenumber ( 2π λ ), L is the propagation distance and Cn is the refractive index structure parameter. This simulation provided us with a number input phases, most of which had branch points included in them (some of the phase screens created with a Rytov variance of 1 had no branch points present) at random positions. This was to be expected as it has been shown that the number of branch points increases with an increase in the turbulence level, with the lower the Rytov variance the greater the chance of having no branch points.17 The positions of the branch points where found by the branch point potential method and their veracity was double-checked by the contour sum technique for the detection of singularities. As mentioned earlier there needs to be a complete loop of phase differences for the contour sum technique to work and because of the fact that the phase screens have been simulated it is easy to calculate around a closed loop of phase differences. When dealing with real data, it will not be as simple to use this method because of the fact that a Shack-Hartmann wavefront sensor is being used to measure the wavefront and due to this averaging of the slopes will have to be performed to form a closed loop of phase gradients. 3. RESULTS FOR BRANCH POINT DETECTION Here we present some of the results using the BPP method, from the initial simulations through to the simulations using Kolmogorov statistics. In Fig.2 we show some results for the initial simulations for the clean case with branch points showing up as peaks and valleys in the potential plot. The same slopes are used in Fig.3 but with normally distributed random noise with a mean of 0 and a standard deviation of 0.3 added; however the same branch points are still visible despite this. Figure 2. Simulated example of slopes with discontinuities present with no noise added along with the corresponding potential plot showing the branch point positions. Figure 3. Simulated example of slopes with discontinuities present with normally distributed random noise of 0 mean and 0.3 std. dev. added and the corresponding potential plot. A comparison of the performances of the branch point potential method and the contour sum method under noise conditions was completed. Noise levels ranging from no noise to normally distributed random noise with a mean of 0 and a standard deviation of 1 were examined. 20 realisations were performed for each noise level and a method was only deemed successful if all branch points were detected in the proper positions and no false positives were detected. It should be noted that the BPP method seemed to detect more false positives but missed fewer actual branch points than the contour sum method. A change in the threshold level could improve the performance but it is still true to say that it performs considerably less well at high noise levels than low levels. It should be noted that the average standard deviation of the slope values themselves over the 20 realisations was 0.28 with a mean of -0.02. As seen from Fig.4 it compares well to the contour sum method when detecting branch points in heavy noise. We can also see the how the BPP method worked on the phase maps created using Kolmogorov statistics and we can compare their performance to that of an ideal case. The contour sum method was performed pixel wise Figure 4. Line graph showing the performance of both the BPP and contour sum methods under normally distributed random noise ranging from no noise to noise with a mean of 0 and standard deviation of 1. These levels of noise are considerable since the standard deviation of the slopes is 0.28 around the phase maps picking out all of the branch points present. This means that the contour sum method was performed at the highest possible resolution and provides an upper bound for branch point detection. The BPP technique uses a simulated Shack-Hartmann wavefront sensor to obtain slope values and this reduces the sampling of the phase map by a factor of 2. This obviously has an adverse effect on the BPP methods ability to detect branch points and this should be remembered when inspecting the results. Green (red) circles mark the positive (negative) branch points in the contour sum maps with black crosses marking the positive and red asterisks marking the negative branch points in the potential plots. Fig.5 shows the potential plot and contour sum map along with the corresponding phase map for a Rytov value of 1 and Fig.6 shows the same for a Rytov value of 6. Figure 5. An example phase map of Rytov value 1 with its branch point positions found using both the contour sum and BPP methods. As we can see from these examples the BPP method performs well at low turbulence levels but it’s effectiveness falls off as the turbulence level increases. It still picks out most of the branch points at higher turbulence levels and could still be beneficial at his level of performance. It has been observed from similar simulations performed that increasing the sampling increases the ability to detect branch points and this has been noted before.18 This may be not be a practical solution at the moment however since we are aiming to correct in real-time and increasing the number of SH lenslets would impede the ability of the system to correct at high speed. The processing speed is only limited by the PC however, and this issue could be overcome by incorporating more hardware computation (eg. FPGA parallel processors) into the system. Figure 6. An example phase map of Rytov value 6 with its branch point positions found using both the contour sum and BPP methods. 4. BRANCH POINT CORRECTION The issue of branch point correction also has to be addressed, as detection is only half of the picture. Since the least-squares technique does not take account of the singularities then other methods must be investigated. Two methods are been looked at to test their suitability for our application: the Goldstein algorithm and Fried’s exponential reconstructor. Fried’s method is described in detail in his paper in 20015 and a version of this algorithm has been implemented in the laboratory by Starikov et. al.19 This contains three steps; the reduce step, the solve step and the rebuild step. It takes account of the hidden phase by using differential phasors instead of the usual phase differences. By using differential phasors the overall field can be taken into account and, when finished, these differential phasors can then be converted into phase differences. After locating the branch points an algorithm is applied for the placement of the branch cuts between the branch points, the hidden phase of the field can be determined by using the formula (4) defined earlier on. The scalar phase is then calculated separately and added to the hidden phase to give the overall phase function with the branch cut discontinuities included. The Goldstein algorithm was originally developed for phase unwrapping in radar arrays but applies equally to the case of optical wavefronts and is described in a book by Ghiglia and Pritt.20 Roggemann and Koivunen applied the Goldstein algorithm to correct for branch points in a phase function6 in a numerical simulation and encouraging results were observed. The algorithm itself has three steps: first it finds the positions of the branch points in the field (there appears to be no reason why the branch point potential detection method couldn’t be used to do this). Second it joins the singularities to form branch cuts using a nearest neighbour technique. Finally it reconstructs the phase by performing a path dependent approach being careful not to cross any of the branch cuts in the field. Both Roggemann and Ghiglia and Pritt’s book state that the algorithm fails under certain conditions, namely when there is an area which is totally encircled by branch cuts. This isolation of phase values causes a piston error in the reconstruction of the wavefront and in the subsequent correction by the DM. It was decided to first test the Goldstein algorithm as a branch point sensitive reconstructor as it required the least adaptation to be implemented. By making use of the phase screen simulations in Sec(2.2) it was possible to test the algorithm for a number of different phase functions and turbulence strengths. To give an opportunity for fair comparison between the two methods the phase is binned from 64x64 pixels into a phase map of 32x32 pixels for use with the contour sum method. This means that the resolution of both methods is the same because the BPP method uses the SH wavefront sensor which halves the resolution of the 64x64 pixel phase map. Both the BPP and the contour sum methods are used to locate the branch points and the phase is then unwrapped using this information. The phase is then reconstructed around the separate branch cuts created by both the BPP and contour sum methods. The phase is the wrapped and this gives the final reconstructed phase. Some early results are shown below using the phase maps seen before. They show that the BPP method reconstructs the wavefronts identically to the contour sum method for the same phase map with the same resolution. Fig.7 shows the phase unwrapping and branch cut placements for both the BPP and contour sum methods along with the identical reconstructed phase for a phase map of Rytov variance 1 while Fig.8 shows the same for a phase map of Rytov variance 6. Figure 7. The branch cuts found for both the BPP and contour sum methods with a binned phase of 32x32 of Rytov value 1 and their identical wrapped output. Figure 8. The branch cuts found for both the BPP and contour sum methods with a binned phase of 32x32 of Rytov value 6 and their identical wrapped output. 5. CONCLUSIONS Our work has shown that the branch point potential method is a viable method for identifying the locations of branch points in an optical wavefront. It worked for the early simulations and also coped very well with the more realistic simulations when they had a lower turbulence level. As the turbulence level increased, with a corresponding increase in the number of branch points, the method performed less well. This highlights certain limitations of the technique, with the most important of these being that of resolution and thresholding. At higher turbulence a better performance can be obtained by increasing the number of SH lenslets however this is not ideal because as the number of lenslets increase so does the time it takes to compute the correction of the wavefront. Since the aim of this project is to correct in real time this is a drawback. It is not obvious yet whether this method can give a worthwhile positive effect without overly complicating the overall system. Further experimental tests are being planned to investigate this. The correction provided by the Goldstein algorithm is good at low turbulence levels however it’s effectiveness decreases as the turbulence increases and areas become isolated by branch cuts. It is also quite a slow technique due to the fact that it is a path dependent method of phase reconstruction. It is unlikely to be a technique that will be used in a finished system; however it is still worthwhile as it gives a good upper limit of correction that can be achieved by other methods. It is planned to investigate Fried’s exponential reconstructor in the near future and compare its performance to that of the Goldstein algorithm. ACKNOWLEDGMENTS This research is funded by Science Foundation Ireland under the grant number 07/IN.1/I906. REFERENCES 1. W. J. Wild and E. O. Le Bigot, “Rapid and robust detection of branch points from wave-front gradients,” Optics Letters 24, pp. 190–192, Feb. 1999. 2. J. F. Nye and M. V. Berry, “Dislocations in wave trains,” Proceedings of Royal Society of London A 336, pp. 165–190, 1974. 3. N. B. Baranova, A. V. Mamaev, N. F. Pilipetsky, V. V. Shkunov, and B. Y. Zel’dovich, “Wave-front dislocations: topological limitations for adaptive systems with phase conjugation,” Journal of Optical Society of America A 73, pp. 525–528, May 1983. 4. D. L. Fried and J. L. Vaughn, “Branch cuts in the phase function,” Applied Optics 31, pp. 2865–2882, May 1992. 5. D. L. Fried, “Adaptive optics wave function reconstruction and phase unwrapping when branch points are present,” Optics Communications 200, pp. 43–72, Dec. 2001. 6. M. C. Roggemann and A. C. Koivunen, “Branch-point reconstruction in laser beam projection through turbulence with finite-degree-of-freedom phase-only wave-front correction,” Journal of Optical Society of America A 17, pp. 53–62, Jan. 2000. 7. J. Notaras and C. Paterson, “Point-diffraction interferometer for atmospheric adaptive optics in strong scintillation,” Optics Communications 281, pp. 360–397, 2008. 8. J. Notaras and C. Paterson, “Demonstration of closed-loop adaptive optics with a point-diffraction interferometer in strong scintillation with optical vortices,” OPTICS EXPRESS 15, Oct 2007. 9. R. Mackey, D. Thornton, and C. Dainty, “Towards a high-speed adaptive optics system for strong turbulence correction,” SPIE 5981, pp. 183–187, Oct. 2005. 10. J. D. Barchers, D. L. Fried, and D. J. Link, “Evaluation of the performance of Hartmann sensors in strong scintillation,” Applied Optics 41, pp. 1012–1021, Feb. 2002. 11. C. A. Primmerman, T. R. Price, R. A. Humphreys, B. G. Zollars, H. T. Barclay, and J. Herrmann, “Atmospheric-compensation experiments in strong-scintillation conditions,” Applied Optics 34, pp. 2081– 2088, Apr. 1995. 12. M. C. Roggemann and D. J. Lee, “Two-deformable-mirror concept for correcting scintillation effects in laser beam projection through the turbulent atmosphere,” Applied Optics 37, pp. 4577–4585, July 1998. 13. D. L. Fried, “Branch point problem in adaptive optics,” Journal of Optical Society of America A 15, pp. 2759–2768, October 1998. 14. G. A. Tyler, “Reconstruction and assessment of the least-squares and slope discrepancy components of the phase,” Journal of Optical Society of America A 17, pp. 1828–1839, Oct. 2000. 15. M. Chen, F. S. Roux, and J. C. Olivier, “Detection of phase singularities with a Shack-Hartmann wavefront sensor,” Journal of Optical Society of America A 24, pp. 1994–2002, July 2007. 16. E. O. Le Bigot and W. J. Wild, “Theory of branch-point detection and its implementation,” Journal of Optical Society of America A 16(7), pp. 1724–1729, 1999. 17. V. V. Voitsekhovich, D. Kouznetsov, and D. K. Morozov, “Density of turbulence-induced phase dislocations,” Applied Optics 37, pp. 4525–4535, July 1998. 18. V. E. Zetterlind III, “Distributed Beacon Requirements for Branch Point Tolerant Laser Beam Compensation in Extended Atmospheric Turbulence,” Master’s thesis, Air Force Institute of Technology, 2002. 19. F. A. Starikov, V. V. Aksenova, V. P.and Atuchind, I. V. Izmailova, F. Y. Kaneva, G. G. Kochemasov, A. V. Kudryashovb, S. M. Kulikov, Y. I. Malakhovc, A. N. Manachinsky, N. V. Maslov, A. V. Ogorodnikov, I. S. Soldatenkovd, and S. A. Sukharev, “Wave front sensing of an optical vortex and its correction in the close-loop adaptive system with bimorph mirror,” in Optics in Atmospheric Propagation and Adaptive Systems X, K. Stein, A. Kohnle, and J. D. Gonglewski, eds., 6747, SPIE, 2007. 20. D. C. Ghiglia and M. D. Pritt, Two-Dimensional Phase Unwrapping, Wiley-InterScience, 1998.