Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Current source wikipedia , lookup
Electrical ballast wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Electric power system wikipedia , lookup
History of electric power transmission wikipedia , lookup
Stray voltage wikipedia , lookup
Distributed control system wikipedia , lookup
Three-phase electric power wikipedia , lookup
Resilient control systems wikipedia , lookup
Electric motor wikipedia , lookup
Power engineering wikipedia , lookup
Electric machine wikipedia , lookup
Electrification wikipedia , lookup
Electrical substation wikipedia , lookup
Control theory wikipedia , lookup
Opto-isolator wikipedia , lookup
Power MOSFET wikipedia , lookup
Power inverter wikipedia , lookup
Mains electricity wikipedia , lookup
Dynamometer wikipedia , lookup
Voltage optimisation wikipedia , lookup
Alternating current wikipedia , lookup
Control system wikipedia , lookup
Distribution management system wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Induction motor wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Buck converter wikipedia , lookup
Pulse-width modulation wikipedia , lookup
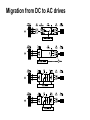
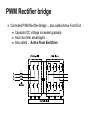
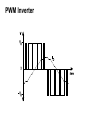
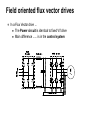
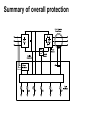
VARIABLE FREQUENCY DRIVES Need for variable frequency drives • Match the Torque of a drive to the process requirements • Match the Speed of a drive to the process requirements • Save Energy and improve efficiency Need for variable frequency drives Smooth acceleration/deceleration to ..... Energy savings are possible ..... Reduce mechanical wear and water hammer Reduce current surges in the power supply system Most significant with centrifugal pumps and fans because Power/energy consumption changes with Speed3 Speed controlled to match the process requirements .... e.g. ... flow or pressure controlled to match demand Automatic Control of the Process Variable is possible Closed loop control from a Process Controller Variable speed – Energy consumption Principles applied to centrifugal Pumps and Fans Variable speed – Energy consumption Compare two methods of speed control in a Motor Car .... Speed controlled using Drive Control (AB) Speed controlled by using Load Control (AC) Common example of VS control The Motor Car is a common example of VS control Control Torque to provide Acceleration and Braking Controls Speed to match the traffic conditions Controls the use of Fuel Main controls in a Motor Car are : Accelerator, which controls the Driving torque Brake, which adjusts the Load torque Control System .... the driver 4 – Quadrant drive 4 – Quadrant drive 1st QUADRANT ..... Torque is +ve and Speed is +ve Therefore ..... Power is +ve Energy transferred from Drive to Load 2nd QUADRANT ..... Torque is -ve and Speed is +ve Therefore ..... Power is -ve Energy transferred from Load to Drive .... Braking 3rd QUADRANT ..... Torque is -ve and Speed is -ve Therefore ..... Power is +ve Energy transferred from Drive to Load 4th QUADRANT ..... Torque is +ve and Speed is -ve. Therefore ..... Power is -ve Energy transferred from Load to Drive .... Braking Fundamental principles Power is Rate at which Work is being done by a machine Power is measured in Watts, or usually kW or MW Power is product of Torque x Speed At standstill .... Output Power = Zero Power (kW) = Torque (Nm) x Speed (rev/ min ) 9550 Torque (Nm) = 9550 x Power (kW) Speed (rev/ min ) Energy represents the work done over a period of time Energy is the product of Power x Time Energy is measured as kiloWatt-hours .... kWh Load Torque Machine Load Characteristic Curve Formulae Conveyors Screw Conveyors Pos. Displ. Pumps Compressors T = k (Constant) Centrifugal Pumps Centrifugal Fans T = k x n2 Extruders Slurry Pumps T B = Breakaway Winders Lathes P= k P = k . n .T k = Constant P = k x n3 T= k .P n Load Torque Machine Load Reciprocating Machines Presses Crushers Mills Wood Chippers Cranes Sawmills Presses Characteristic Curve Formulae Torque – Speed curves Torque, Power & Speed are the most important parameters Torque-Speed curves illustrate the performance of the VSD Power-Speed curves illustrate the performance of the VSD shows the rotational force at various speeds shows the rate of energy consumption at various speeds These parameters are all related ... for example the Motor Car Pressing the accelerator produces more torque .... which provides acceleration and gives more speed .... which requires more power (torque x speed) .... which requires more energy (fuel) (power x time) Types of variable speed drives Mechanical Variable Speed Drives Belt and chain drives with adjustable diameter sheaves Metallic friction drives Hydraulic Variable Speed Drives Hydrodynamic types Hydrostatic types Electrical Variable Speed Drives DC Drive with DC motor VVVF Converter with AC motor Slip Control with Slip ring Induction Motor Cyclo-converter with AC motor Electromagnetic Coupling or "Eddy Current" Coupling Servo Drives and Stepper Drives Common types of variable frequency drives Migration from DC to AC drives Principles of AC variable drives Speed controlled by adjusting the Power Frequency (f) 120 f Synchronous Speed = rev/ min n s Actual speed is slower due to the Slip Actual Speed n = ( ns - slip) rev/ min Stator field flux () is derived from the supply voltage Air-gap Flux V p f Output Torque is product of flux density and rotor current IR Output Torque T I R Nm AC Variable speed drive From these equations, the following deductions can be made Speed is controlled by Frequency AND Stator Voltage Speed reaches Base Speed when VS = maximum, Further speed increase reduces the Field Flux This is known as the Field Weakening range Torque is dependent on VS Full torque possible at ALL speeds in normal speed range But Torque falls to zero at standstill In the Normal Speed range Output power increases in proportion to the speed In the Field Weakening range, Torque falls in proportion to the speed Output power of the AC Motor remains constant AC Variable speed drive AC Variable speed drive Main Features of the AC Variable Speed Drive Good control and performance characteristics AC converter relatively complex and expensive AC Motor needs no maintenance ... high reliability Efficiency : Converter ± 97% ... overall AC drive >90% Basic definitions Rectifier ... AC to DC converter Inverter … DC to AC converter Basic definitions AC Converter converts one AC voltage and frequency to another AC voltage and frequency .... often variable Usually requires an intermediary DC link with smoothing Basic definitions DC Converter ... Converts one DC voltage to another DC voltage Usually requires an intermediary AC link, such as a transformer Basic definitions Electronic Switch ....... Electronically connects or disconnects an AC or DC circuit Can often be switched ON or OFF from a gate terminal Bistable switching Electronic Switch usually operated in the bistable mode Blocking Mode : fully switched OFF • Voltage across switch is High • Current through switch is Low (only leakage current) Conducting Mode : fully switched ON • Voltage across the component is Low • Current through the component is High Diodes, Thyristors & GTOs are inherently bistable Transistors are NOT inherently bistable Must be biased fully ON or OFF to behave like a bistable device Power diodes IDEAL : Forward Conduction : Resistanceless Reverse Blocking : Lossless Switch on/off Time : Instantaneous Main terminals are the Anode (A) and the Cathode (K) Names come from the days when Valves were common When the anode is positive relative to the cathode it is said to be forward biased and the diode conducts When the anode is negative relative to the cathode is said to be reverse biased and current is blocked Power diodes Many different mechanical designs are used Rated from a few amps … to thousands of amps Most common is for several diodes to be encapsulated into an Insulated Module ... 6-pulse bridge, half bridge, etc The base of the module electrically isolated ... Can be mounted directly onto heatsink Bipolar junction transistor Main advantage of Bipolar Junction Transistors (BJT) .... Turned on and off from the base terminal Suitable for Self commutated inverter circuits Disadvantage is low base amplification factor .... 5 to 10 base circuit must be driven by an auxiliary transistor called the Darlington connection Field effect transistor FET is a special type of transistor ... particularly suitable for high speed switching applications Gate is voltage controlled .... not current controlled behaves like a HF voltage controlled resistance MOSFET is a three terminal device Source (S), Drain (D) and the Gate (G) correspond to Emitter (E), Collector (C) and Gate (G) of BJT Field effect transistor MOSFET is a majority carrier device .... short switching time so ... switching losses are low best suited to high frequency switching applications With development of Pulse Width Modulated (PWM) inverter high frequency switching has become a desirable feature to provide a smooth output current waveform MOSFETs are used for Small PWM frequency converters MOS stands for Metal Oxide Silicon. Ratings from 100Amp @ 50Volt to 5Amp @ 1000Volt Insulated gate bipolar transistor Insulated Gate Bipolar Transistor (IGBT) ..... unites best features of BJT and MOSFET technologies Construction similar to a MOSFET with additional layer to provide conductivity modulation, similar to BJT low conduction voltage drop IGBT is a three terminal device .... Power terminals are called Emitter (E) and Collector (C) Control terminal is called the Gate (G) Insulated gate bipolar transistor IGBT has ...... good forward blocking ability very limited reverse blocking ability Operates at higher current densities than BJT or MOSFET Electrical equivalent circuit of the IGBT .... hybrid device MOSFET driver integrated with a Bipolar PNP transistor Insulated gate bipolar transistor Gate driver requirements similar to those of power MOSFET Turn-on : 10V - 15V takes 1s .... Threshold typically 4V Turn-off : zero volts takes 2s ... accelerated by -ve volts IGBT devices can be produced with faster switching times at the expense of increased forward voltage drop Main advantages of IGBT are : Good power handling capabilities .... 500A at 1,500V Low forward conduction voltage drop of 2V to 3V … higher than BJT but lower than MOSFET of similar size Gate is voltage controlled with low gate current Relatively simple voltage controlled gate driver High speed switching capability .... up to about 20kHz VF increases with temperature .... making device suitable for parallel operation ... without thermal instability Comparison of PE switches Overall control system Overall Control System divided into 4 main areas : Inverter Control System Speed Control System and Speed feedback Current (Torque) Control System and Current feedback External System Control Interface Overall control system Inverter Control System Controls the Switching Sequence of Inverter Switches Provides Component Protection Speed feedback and Speed Control System Controls the Speed output relative to Setpoint Current Control System and Current feedback Controls the Current output relative to Limits Provides Short-circuit and Earth-Fault Protection Motor Modelling and Thermal Overload Protection External System Control Interface User Settings and Programming Digital and Analog interface to Control System (PLCs) Fault Diagnostics Power supply requirements Simplest Method for Power Supply ... Mains Transformer Major problem ... interruption of the Mains Power VSD Stops ... even for short dips in the supply Commonly use Switched Mode Power Supplies (SMPS) Control power maintained until motor stops Mains failure ... power initially from large DC Capacitors Thereafter ... motor behaves as AC induction generator Usually have several Power Supplies to modules such as ... Device Driver Power Supplies need to be isolated Cooling fans for the converter heatsinks DC Link Bus Charging Circuits Control Cards .... Microprocessor circuits DC Bus charging Two main approaches to DC Bus Charging .... Charging resistors with Contactor Bypass (most common) Phase-controlled bridge rectifier instead of diode bridge DC Bus charging - Resistors Many variations on Charging Resistor theme ... Resistors can be in DC link or on 3-phase supply lines Single large resistor or multiple sets of smaller resistors Electronic Switch instead of Relay ... smaller VSDs Main Advantages of Charging Resistors are .... Simplicity of the control circuit Cheap and easy to implement Main Disadvantages are ..... Losses due to relay contacts and coils Physical size of these components Reliability of electromechanical devices ... Can be a problem with numerous starts and stops Controlled thyristor bridge Phase-controlled rectifier bridge ... Used mainly on larger sizes ... above 22kW Controlled thyristor bridge Phase-controlled rectifier bridge .... Capacitor voltage increased gradually Main Advantages of Controlled Thyristor Bridge are .... Conduction losses are lower Physical size reduced by not having the relay Main Disadvantages are ..... Thyristors more expensive than Diodes More complex control circuit Reactive power requirements are slightly higher Some VSDs with PWM Rectifier ... other advantages PWM Rectifier bridge Controlled PWM Rectifier Bridge ... also called Active Front End Capacitor DC Voltage increased gradually Also has other advantages … Also called ... Active Front End Drive PWM Rectifier bridge Main Advantages of PWM Rectifier Bridge are : Reduces the level of harmonic currents in mains … AC Line current waveform is much smoother Makes full 4-quadrant operation possible Can control power factor angle ... power factor correction Main Disadvantages of PWM Rectifier are ..... IGBT Bridge is more expensive than Diode Bridge Control Circuit is more complex and expensive Require line chokes to limit rate of current rise AC Waveform-Ideal Synthesized AC Waveform-Square Synthesized AC Waveform-Part Square Synthesized AC WaveformTrapezoidal PWM Inverter Output Frequency controlled ... by changing switching speed Output Voltage controlled ... by changing the Pulse Width Output Current waveform … depends on load impedance Synthesized AC Waveform-PWM PWM Inverter PWM Inverter Modulation Technique for sine-coded PWM using the SineTriangle intersection method - digital implementation 3-Phase PWM Inverter 3-Phase PWM Inverter AC Variable speed drives In general, AC Variable Speed Drives are designed to ... Transform Electrical Energy into rotational Mechanical Energy In most applications ... Control Speed with reasonable accuracy In special Applications ... Need accurate and fast dynamic control of speed and torque AC Variable speed drives There are 3 basic types of AC Variable Speed Drive available today “Standard” Fixed V/f Drive (also known as a VVVF Drive) … OK for Pumps & Fans Less expensive than the devices below Sensorless Vector Control Drive … Better Speed Regulation Better Starting Torque & Acceleration Field Oriented Flux Vector Control Drive ... Full implementation of Vector Control Strategy Excellent Speed and Torque control characteristics Variable speed drive control loops The Level of Control can be ... Simple Open-Loop Control ... This is the strategy used for Fixed V/f drives No internal feedback from the motor (except for protection) Closed-Loop Control ... This is the strategy used for Vector Control drives Feedback from the motor used to adjust PWM output Achieves enhanced performance Cascade Closed-Loop Control ... Strategy used for Field Oriented Flux Vector Control drives Feedback of Torque and Speed used to improve dynamic performance Achieves better than DC Drive performance Open loop control Open loop speed control is suitable for .... Applications where Speed Accuracy not important Consequences of changes in the process not severe Standard fixed V/f drives ... are essentially Open Loop type Open loop control Speed Reference fed to Ramp Circuit to convert step change in the speed request to a slowly changing signal V/f Regulator sets magnitude of Voltage and Frequency Finally, PWM Switching logic section controls the switches according to a PWM algorithm (sine-coded, etc) No speed feedback from the motor .... open-loop control Current feedback is for protection, indication & current limit Closed loop control Closed Loop Control used for more difficult drive applications ... Torque, Speed or Position accurately controlled Accuracy of control ..... very important Errors .... have a large influence on the process For these applications, Closed Loop Control is necessary Generally applies to high performance VSDs .... such as DC Drives and Vector controlled AC VSDs Standard fixed V/f AC Drives can be used in closed loop systems ... but they are not capable of high performance Closed loop control Accurate Feedback from motor transducer..... Speed transducer … tacho or encoder Position transducer … position encoder Torque transducer … current transducer Power Converter .... controls the Motor response Controller .... which controls the Converter Closed loop control Closed Loop Control System operates as follows .... Measurement of Process Variable (PV) .... eg an encoder Comparison of PV with Set Point (SP) gives an error value .... error value = SP - PV Error value processed by Controller to adjust the Output, which in turn Controls the AC converter and motor In industrial applications, the controller is a Microprocessor Closed loop control Motor Car ..... example of a closed-loop feedback control Speed assessed by the driver looking at speedometer Measured speed (PV) is compared to desired speed (SP) Depending on the error, the driver may decide to • increase speed by pressing the accelerator • decrease speed by pressing the brake Driver continually measures PV, calculates the error and gives the appropriate Output At the same time, Driver might be simultaneously engaged in several other tasks of closed-loop feedback control, such as steering, controlling cabin temperature, etc. Cascaded loop control If each variable was proportional to the variable before it Simple Open-loop control, without feedback would be OK In a VSD .... some time delays not simply proportional ... motor current responds to new frequency with a rise The time is dependent on its leakage inductance Motor speed follows the torque with a rise time ... dependent on its inertia Inaccuracies acceptable in simple applications .... Speed control for pumps, conveyors, etc Some applications require Close Speed and Torque control Speed and Torque control of paper machine VSDs Cascaded loop control Design techniques have evolved from DC Drives ... and deals with control problem in two smaller stages Speed Loop compares speed ... calculates current setpoint Current Loop compares current ... calculates frequency setpoint Cascaded loop control Speed Loop allows for one of time delays in system delay between the torque and the measured speed Current Loop allows for other time delay .... delay between the output frequency and the current rate of change of current is faster than change of speed The two control loops required for accurate speed control are An outer Speed Control Loop, which compensates for the mechanical transients, mainly load inertia An inner Torque Control Loop, which compensates for the electrical transients, mainly winding X and R Vector control Vector Control ... Been available since the mid-1980s Promoted as an AC equivalent to DC Drives Only become possible as a result of the large strides in the fields of power electronics and digital control Gets its name from the fact that .... System can separately measure and control the two Vector components of the stator current Vectors represent magnitude and direction of the current Specifically ....Flux current and Torque-producing current Vector control Vector Control is a “generic” name applied to all AC Drives that provide performance that is higher than “standard” AC Drives Vector Control is one of the more abused terms used to promote the use of modern AC Variable Speed Drives ... performance said to be equivalent to high performance DC Drives Dynamic Performance that is equivalent to a DC Drive is only possible if Vector Control is fully implemented There are many Vector Control Drives on the market that only partially implement the strategy Vector control Simplified equivalent circuit of an AC Induction Motor Using a Hall-effect current transducer, the drive can measure the Stator Current IS flowing to the motor ... but NOT IR and IM Vector control IR and IM are the Vector components of Current IS Vector components can be calculated from measured values Vector control Therefore, the main purpose of Vector controller is to ... Continuously calculate value of Flux Current IM Continuously calculate value of Torque Producing Current IR Continuously calculate other variables such as Slip, Shaft Speed, etc Central part of Vector control is the Active Motor Model ... Uses motor constants stored in memory as part of calculation to continuously model the connected motor Measures stator current in each phase and uses this to calculate the torque current (IR) and flux current (IM) Measures actual speed and calculates slip For adequate dynamic response of the drive, these calculations need to be done at a rate of more than 2,000 times per sec This only became commercially viable within last 10 years with development of 16-bit microprocessors Sensorless vector control These are essentially Fixed V/f “open loop” drives with some performance enhancements due to a digital “Motor Model” The Motor Model is used to calculate 2 main variables Flux Current (IM) ... to automatically regulate output V/f ratio. This results in improved Torque performance, particularly at low speeds Percentage Slip ... to automatically regulate output frequency. This results in improved Speed holding performance ... without the need for a shaft mounted encoder (hence the name Sensorless Vector Control) For Sensorless Vector Control to be effective, the drive needs to be “tuned” to the connected motor Auto-tuning feature normally available ... used to measure the required motor parameters and store them in memory Field oriented flux vector drives These are ”Closed loop” drives with an Active Motor Model and cascaded Speed and Torque control loops The high performance microprocessor runs a Motor Model that can calculate numerous drive variables For the Vector Control to be effective, the drive needs to be “tuned” to the connected motor Auto-tuning feature normally available ... used to measure the required motor parameters and store them in memory Field Oriented Flux-Vector Control necessary on drives where ... Accurate speed and/or torque control is necessary High dynamic performance is required ... speeds and/or load torque change rapidly Full torque is required at zero speed ... for example on hoists Field oriented flux vector drives In a Flux Vector drive ... The Power circuit is identical to fixed V/f drive Main difference ...... is in the control system Field oriented flux vector drives Flux-Vector control of a PWM Converter .... Control is essentially Cascaded Closed-loop type Vector control performance Some interesting Figures … Speed Accuracy Torque Response DC Drive with encoder V/f Vector Sensorless V/f Vector with encoder Field Oriented Sensorless Field Oriented with encoder 0.01% 1.0% 0.1% 0.5% 0.001% 10-20msec 100msec 10-20msec 1-10msec 1-10msec Basic setting parameters Remaining Parameters settings can be selected as follows : Maximum speed ... usually set to 50Hz or higher Minimum speed ... usually 0Hz for a pump or fan drive and higher for constant torque applications Rated Motor Current ... size of motor may be small Current Limit ... determines Starting Torque Acceleration Time ... determines the Ramp-up Time Deceleration Time ... determines the Ramp-down Time Braking Method ... 3 Options usually available Starting Torque Boost ... cover Breakaway Torque Note : Avoid over-fluxing the motor !!! Other Settings ... possibly adjust "default" settings Synthesizing an AC WaveExamples Simple square wave Square wave with smaller conduction width Trapezoidal waveform A series of pulses of fixed amplitude but varying width within a cycle (known as pulse width modulation or PWM) Protection of AC variable speed drives The protection of AC Variable Speed Drives includes ... Protection of the AC Converter Protection of the Electric Motor AC Converter protection Protection for front-end rectifier usually NOT provided … Usually require external upstream short-circuit protection HRC fuses or fast Circuit Breaker Following protection usually included ... Protection systems for the PWM Inverter Protection for DC Busbar Protection for Output … Motor and Motor Cable • Motor thermal overload protection • Motor short circuit protection • Motor earth fault protection Summary of overall protection Input phase imbalance One input phase voltage low .... Other 2 phases will conduct majority of supply current Possible failure of rectifier diodes DC Current ... miss every 3rd pulse, other 2 pulses higher can lead to failure of the rectifier diodes or capacitors Input Phase Imbalance Protection implemented by ..... Measuring the Input Currents .... Costly Monitoring the DC bus .... analyse waveform distortion DC bus under voltage Power Circuit can operate at any voltage 0 - VMax Under-voltage protection required for Power Supplies Typically set to 15% below lowest rated voltage When Power Supply output voltage regulation is lost ... Microprocessor could switch to an indeterminate state Driver circuits lose control of the Power Switches Power Switch may attempt to operate in the linear region Power Switch may be slow to switch off Power Electronic Switches will fail DC bus over voltage All electrical components fail if exposed to high Over-voltage In AC drives, high DC over-voltages can occur due to ... High voltages in the mains power supply ... Very Rare Motor behaving as Induction Generator .... dynamic braking of a high inertia load The following components have the lowest tolerances to High Voltages .... DC bus Capacitor Bank DC bus connected Power Supply Modules Power Electronic Switching Devices DC bus over voltage DC capacitor bank ... series and parallel capacitors Sharing will not be perfect Peak voltage on DC bus is approx 1.4 x supply voltage With a maximum capacitor voltage of VMax = 750VDC ... the practical limit for input voltage is 480VAC + 10% For AC drives with >500Volt input, special capacitors are required Maximum voltage of Semiconductor switches is 1,400 VDC Seems well above Capacitor rating But, voltage across a device during turn-off can be 400V higher, due to stray circuit inductances Bus voltage must be limited to 800 VDC Maximum DC bus over voltage In Modern Digital AC drives ... Over-voltage Protection provided by microprocessor because DC bus voltage changes relatively slowly Digital controller can also provide over-voltage control During deceleration of load ... override ramp-down setting to prevent the over-voltage trip DC bus voltage allowed to rise to safe 750 VDC Trip level typically at 800 VDC Operation interface & diagnostics Human Interface Module (HIM) .... LCD or LED Display 3 Main levels of operator information and fault diagnostics : 1. Parameters ... Settings, Status and Metering 2. Diagnostic information ... Status of Protection Circuits 3. Diagnostic information ... Status of Internal Circuits ... internal diagnostics only found in special VSDs Internal parameters Typical Internal Parameters and Fault Diagnostics ... Module Parameters and Fault Diagnostics Power Supply Power Supply Voltage, Current and Frequency DC Bus DC Link Voltage and Current Motor Output Voltage, Current, Frequency, Speed, Torque, Temperature Control Signals Setpoint, Process Variable, Error, Ramp times Status Protection circuits, module failures, internal temps, fans running, switching frequency, current limit, motor protection, etc Fault Conditions Power device fault, power supply failed, driver circuit failed, current feedback failed, voltage feedback failed, main controller failed Fault diagnostics - parameters Common Faults ... possible Internal/External Problems Protection Internal Fault External Fault Over-voltage Deceleration rate set too fast Mains voltage too high Transient over-voltage spike Under-voltage Internal power supply failed Mains voltage too low Voltage sag present Over-current Power electronic switch failed Driver circuit failed Short circuit in motor or cable Thermal Overload Control circuit failed Motor over-loaded or stalled Earth Fault Internal Earth fault Earth fault in motor or cable Phase Imbalance Power diode in rectifier failed Mains phase voltage imbalance Phase connection loose Over-temperature Cooling fan failed Heatsink blocked Ambient too high Enclosure cooling blocked Thermistor Trip Motor thermistor protection Motor side filter Connection Example of Line Filter and Motor Filter Natural ventilation Enclosure can be Smaller ... additional Ventilation required Exchange air between Inside and Outside of enclosure Natural Ventilation Convectional cooling airflow through air vents Vents at Bottom and Top ..... the "chimney" effect Forced ventilation Cooling airflow assisted by fan at Top or Bottom of cubicle General safety requirements Requirements for Safety .... should be carefully followed Australian Standard AS 3000 : SAA Wiring Rules apply Safety earths must be installed before power connected AC Converters have Large Capacitors on the DC link After VSD switched off ..... wait several minutes Allow internal capacitors to fully discharge Visual Indication ... shows when capacitors are charged Hazardous areas AC Converters should NOT be mounted in Hazardous Areas ..... even when connected to an Ex rated motor When necessary ..... AC converters may be mounted in Approved Enclosure Certification should be obtained for entire VSD System .... including both Converter and Motor Any questions ?