Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Photoelectric effect wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Equations of motion wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Centripetal force wikipedia , lookup
Hooke's law wikipedia , lookup
Eigenstate thermalization hypothesis wikipedia , lookup
Internal energy wikipedia , lookup
Kinetic energy wikipedia , lookup
Gibbs free energy wikipedia , lookup
Classical central-force problem wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Heat transfer physics wikipedia , lookup
Thermodynamic system wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
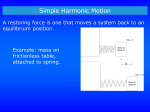
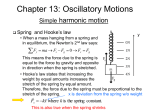
Forces in a Spring
If a spring is strained so that
its length deviates from its
equilibrium value by x
(positive x means extension,
negative x means
compression), Hook’s law
says that a recoil force, F
exists in the spring and is
given by:
Simple Harmonic Motion
Unstrained or equilibrium
length of the spring
x is positive here.
x is negative here.
F = −k x
Negative because the recoil force always tries to restore
the spring to its equilibrium length or to reduce x.
1
where k is the spring constant, a measure of the stiffness of
the spring. It has units of N/m.
Example 1 Spring Constant of a Spring.
A spring hangs vertically down from a support. When you
hang a 100-gram mass from the bottom end of the spring
and stop any motion of the system the spring is stretched by
10 cm. Determine the spring
constant.
Hint: sketch a freev
v
body diagram and use F = −k x
If we hang another 100-gram mass on the spring, the spring
stretches further. Is the additional stretch more than, less
than, or equal to 10 cm?
Energy Stored in a Spring
The elastic potential energy of a strained spring is :
U=
1 2
kx
2
Note that the force in a spring is a kind of
conserved force because the work done by the
spring depends only on x and is zero when the
spring returns to its starting position. Therefore,
we call the energy in a spring a potential energy
as we do for the energy associated with the
gravitational force.
3
Question: A block connected to a horizontal spring sits on a
frictionless table. The system is released from rest, with the
spring initially stretched. What happens to the energy stored in
the spring? What is the maximum speed of the block?
Solution:
As the block oscillates, the energy goes back and forth between
elastic potential energy and kinetic energy. Simulation
⇒
⎛ k ⎞
v max = xmax ⎜
⎟
⎝ m⎠
1 2
1
2
kxmax = mv max
2
2
Note that initially the block is at rest. Hence Ui = Umax and
correspondingly xi = xmax.
4
Example 3 Maximum Compression of a Spring.
Example 2 Energy in an Oscillating Spring.
Umax = K max
2
Question: A block with a mass of 1.0 kg is released from rest
on a frictionless incline. At the bottom of the incline, which is
1.8 m vertically below where the block started, the block
slides across a horizontal frictionless surface before
encountering a spring that has a spring constant of 100 N/m.
(a) What is the maximum compression of the spring? (b)
What is the maximum acceleration of the block after it makes
contact with the spring?
Solution:
(a) Ui = Uf ⇒ mgh =
xmax =
5
2mgh
=
k
1 2
kxmax
2
2 × 1.0 kg × 10 N/kg × 1.8 m
=
100 N/m
= 0.36 m2 = 0.60 m
6
1
Example 3 Maximum Compression of a Spring (cont’d).
Simple Harmonic Motion (SHM)
(b) The acceleration is the maximum when the force is
maximized, which is when the spring is the most compressed.
Here, we only need to be concerned with the magnitude of
the variables.
The oscillatory motion we saw in the last examples is call
simple harmonic motion, in which no energy is lost. The
energy only gets converted between elastic potential energy
and kinetic energy during the motion.
Fmax = kx = 100 N/m × 0.60 m = 60 N
amax =
Fmax
60 N
=
= 60 m/s2
m
1.0 kg
An illuminative way to see how the different kinetic variables,
x, v and a evolve with t in a simple harmonic motion is to use
a reference circle (to be elicited in the next four pages).
7
8
Displacement, x
Displacement in a SHM
1 cycle
+A
The displacement, x, of the shadow of a ball undergoing
uniform circular motion conforms to that of a SHM.
t
x = A cosθ = A cos ωt
Film (top
x=0m
view)
where ω = angular frequency,
A = amplitude of the SHM.
−A
Period = T
Several characteristic variables of a SHM:
Position
at t = 0
Amplitude, A: The maximum displacement
Reference
circle
Period, T: The time required to complete one cycle
Frequency, f: The number of cycles per second (measured in Hz)
f =
9
Light
1
T
ω = 2π f =
2π
T
10
Acceleration in a SHM
Velocity in a SHM
v x = −vT sin θ = − {
Aω sin ωt
vmax
a x = − ac cos θ = − {
Aω 2 cos ωt
amax
a = −ω2x
amax = Aω2
v = −Aω sinωt
vmax = Aω
11
12
2
x = A cos(ω t )
Motion
Graphs
What determines the angular frequency?
v
From last page, a = −ω 2 xv .
If we graph
position, velocity,
and acceleration
of the object on
the spring, as a
function of time,
we get the
following. The
period of these
oscillations
happens to be 4.0
seconds.
v = − Aω sin(ω t )
In turn, by Newton’s second law, we have:
v
v
∑ F = ma
v
v
−kx = ma
v
k v
a=− x
m
a = − Aω 2 cos(ω t )
ω2 =
k
m
Since vmax =
k
m
14
We have an object (mass m) attached to a massless spring.
The object is on a horizontal frictionless surface. We move
the object so the spring is stretched, and then we release it.
The object oscillates back and forth.
(3)
A2ω2
ω=
Understanding Oscillations from
Energy Graphs
Etot = U(t) + K(t) = Umax = Kmax
2
⇒
Hence ω is determined exclusively by k and m only.
What determines the energy of a SHM?
Kmax = ½ mvmax2
(2)
By (1) and (2), we have:
13
Umax = ½ kA2
(1)
(4)
= A2(k/m), (3) and (4) are equivalent.
To understand the motion, let’s take a look at graphs of kinetic
energy and elastic potential energy, first as a function of time
and then as a function of position.
Which color goes with kinetic energy, and which with elastic
potential energy?
From the above, we can conclude that the energy of a
SHM is determined by k and A (by eqn. (3)) or
equivalently m and vmax.
Simulation
15
Which graph is which?
2.
3.
1 2
kx
2
K = ½ mv2
16
Example 4 Elapsed time in a SHM.
Energy graphs
1.
U=
The red one is the kinetic energy; the blue one is the
potential energy.
The blue one is the kinetic energy; the red one is the
potential energy.
The graphs are interchangeable so you can't tell
which is which.
An object attached to a spring is pulled a distance A from the
equilibrium position and released from rest. It then
experiences simple harmonic motion with a period T. The time
taken to travel between the equilibrium position and a point A
from equilibrium is T/4. How much time is taken to travel
between points A/2 from equilibrium and A from equilibrium?
Assume the points are on the same side of the equilibrium
position, and that mechanical energy is conserved.
1. T/8
2. More than T/8
3. Less than T/8
4. It depends whether the object is moving toward or away
from the equilibrium position
17
18
3
Example 4 Elapsed time in a SHM (cont’d)
Suppose that at t = 0 the object is at x = A from equilibrium.
So the equation, x = A cos(ω t ) applies.
x = A cos(ω t )
Let’s solve for the time t when the object is at x = A/2 from
equilibrium.
A
1
= A cos(ω t ) ⇒
= cos(ω t )
2
2
2π
By using ω =
, the above equation becomes:
T
1
2π t
= cos(
)
T
2
By taking the inverse cosine of both sides, we get:
t
π
3
19
Another Example of SHM -- Pendulum
=
2π t
T
⇒
t=
T
6
(remember to express the angles in
radian)
This is more than T/8, because the object travels at a small
average speed when it is far from equilibrium.
20
Take torques around the support point.
v
v
∑ τ = Iα
Free-body diagram of a pendulum when it is displaced to
the left.
−Lmg sinθ = mL2α
g
L
α = − sinθ
If angle θ is small, sinθ ≈ θ
Free-body diagram of a pendulum when it passes through
equilibrium.
⇔
α = −ω 2θ
g
α ≈ − θ , which has the SHM form a = −ω2x (see eqn. (1)
L
on p. 14)
Simulation
21
So, the angular frequency is ω = g
L
22
Damped Harmonic Motion
In simple harmonic motion, an object oscillated
with a constant amplitude.
In reality, friction or some other energy dissipating
mechanism is always present and the amplitude
decreases as time passes.
1) simple harmonic motion
This is referred to as damped harmonic motion.
2&3) underdamped
4) critically damped
5) overdamped
23
24
4
Driven Harmonic Motion
Resonance
When a force is applied to an oscillating system
at all times, the result is driven harmonic
motion.
Resonance is the condition in which a time-dependent
force can transmit large amounts of energy to an
oscillating object, leading to a large amplitude motion.
Here, the driving force has the same frequency
as the spring system (i.e., √(k/m)) and always
points in the direction of the object’s velocity.
Resonance occurs when the frequency of the force
matches a natural frequency at which the object will
oscillate.
25
26
5