Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Dynamics of Squirrel Monkey Linear Vestibuloocular Reflex and
Interactions with Fixation Distance
LAURA TELFORD, SCOTT H. SEIDMAN, AND GARY D. PAIGE
Department of Neurology and Center for Visual Science, University of Rochester, Rochester, New York 14642
Telford, Laura, Scott H. Seidman, and Gary D. Paige. Dynamics of squirrel monkey linear vestibuloocular reflex and interactions
with fixation distance. J. Neurophysiol. 78: 1775–1790, 1997. Horizontal, vertical, and torsional eye movements were recorded using
the magnetic search-coil technique during linear accelerations
along the interaural (IA) and dorsoventral (DV) head axes. Four
squirrel monkeys were translated sinusoidally over a range of frequencies (0.5–4.0 Hz) and amplitudes (0.1–0.7 g peak acceleration). The linear vestibuloocular reflex (LVOR) was recorded in
darkness after brief presentations of visual targets at various distances from the subject. With subjects positioned upright or noseup relative to gravity, IA translations generated conjugate horizontal (IA horizontal) eye movements, whereas DV translations
with the head nose-up or right-side down generated conjugate vertical (DV vertical) responses. Both were compensatory for linear
head motion and are thus translational LVOR responses. In concert
with geometric requirements, both IA-horizontal and DV-vertical
response sensitivities (in deg eye rotation/cm head translation)
were related linearly to reciprocal fixation distance as measured
by vergence (in m01 , or meter-angles, MA). The relationship was
characterized by linear regressions, yielding sensitivity slopes (in
degrcm01rMA 01 ) and intercepts (sensitivity at 0 vergence). Sensitivity slopes were greatest at 4.0 Hz, but were only slightly more
than half the ideal required to maintain fixation. Slopes declined
with decreasing frequency, becoming negligible at 0.5 Hz. Small
responses were observed when vergence was zero (intercept), although no response is required. Like sensitivity slope, the intercept
was largest at 4.0 Hz and declined with decreasing frequency.
Phase lead was near zero (compensatory) at 4.0 Hz, but increased
as frequency declined. Changes in head orientation, motion axis
(IA vs. DV), and acceleration amplitude produced slight and sporadic changes in LVOR parameters. Translational LVOR response
characteristics are consistent with high-pass filtering within LVOR
pathways. Along with horizontal eye movements, IA translation
generated small torsional responses. In contrast to the translational
LVORs, IA-torsional responses were not systematically modulated
by vergence angle. The IA-torsional LVOR is not compensatory
for translation because it cannot maintain image stability. Rather,
it likely compensates for the effective head tilt simulated by translation. When analyzed in terms of effective head tilt, torsional responses were greatest at the lowest frequency and declined as
frequency increased, consistent with low-pass filtering of otolith
input. It is unlikely that IA-torsional responses compensate for
actual head tilt, however, because they were similar for both upright
and nose-up head orientations. The IA-torsional and -horizontal
LVORs seem to respond only to linear acceleration along the IA
head axis, and the DV-vertical LVOR to acceleration along the
head’s DV axis, regardless of gravity.
INTRODUCTION
The vestibuloocular reflex (VOR) generates compensatory eye movements that help maintain binocular fixation on
targets in space during head motion. There are two classes
of VOR, each governed by different vestibular end organs.
The angular VOR (AVOR) is driven by the semicircular
canals in response to head rotations, whereas the linear VOR
(LVOR) is driven by the otolith organs in response to linear
head accelerations. The latter is the focus of this report.
During the past decade, important advances have occurred
in our understanding of the LVOR, largely due to the recognition of two key considerations that govern LVOR response
properties. The first is that the otolith organs, and peripheral
afferents that innervate them, respond equally well to two
kinds of linear acceleration, those produced by head tilt relative to gravity and those generated by head translation. This
physical property (Einstein’s equivalency principle) makes
otolith input inherently ambiguous and presents a problem
because the ocular responses required to compensate for tilt
and translation differ. For example, head roll-tilt requires
compensatory torsion of the eyes (ocular counterrolling),
whereas interaural (IA) head translation, which produces
nearly the same otolith stimulus, requires horizontal rotation
of the eyes to maintain a stable image. Although selective
processing of input from multiple afferents with different
directional sensitivities might help resolve the ambiguity
under constrained conditions, this cannot resolve the general
problem (Holly and McCollum 1996). Further, such complex processing does not seem to occur in the LVOR. Both
horizontal and torsional responses occur simultaneously in
response to either IA acceleration or roll-tilt (Paige and
Tomko 1991a; Paige et al. 1995), and neither type of LVOR
systematically changes with head orientation relative to
gravity. In short, the two LVORs behave as if responding
exclusively to IA acceleration.
An alternative solution to otolith response ambiguity can
be achieved largely by a central parsing of linear accelerations on the basis of frequency content (Guedry 1974;
Mayne 1974). In this scheme, tilt pathways select for static
and low-frequency accelerations, while translation pathways
select for high-frequency inputs. This solution is harmonious
with natural behavior. Translational accelerations are typically transient or high frequency (e.g., during walking or
running) and are never continuous, whereas tilt often is prolonged (e.g., lying down). Studies of LVOR function support a frequency-selective scheme but with considerable
overlap between functions. For example, although IA acceleration generates both tilt (torsion) and translational (horizontal) responses simultaneously, the two are governed by
different frequency-dependent dynamics (Paige and Tomko
1991a). In general, translational LVORs behave with highpass dynamics and include horizontal responses to IA mo-
0022-3077/97 $5.00 Copyright q 1997 The American Physiological Society
/ 9k1d$$oc09 J069-7
09-15-97 14:07:53
neupa
LP-Neurophys
1775
1776
L. TELFORD, S. H. SEIDMAN, AND G. D. PAIGE
tion, vertical responses during dorsoventral (DV) motion,
and complex responses to nasooccipital motion. In contrast,
tilt-LVORs behave with low-pass characteristics and include
torsional eye movements during IA motion (equivalent to
head roll-tilt) and vertical responses during nasooccipital
motion (equivalent to head pitch-tilt). However, the precise
dynamic characteristics and interactions between the different LVORs as a function of both the frequency and amplitude
of head acceleration remain unexplored. This study quantifies LVOR dynamics and linearity during head translations
limited to the IA and DV axes, focusing on a high-frequency
range associated with natural linear motion.
A second important consideration is that the kinematic
requirements of compensatory responses to head translation,
but not tilt, depend on fixation distance. This is particularly
critical in frontal-eyed bifoveate species such as primates.
To maintain binocular foveal fixation on targets in space,
the LVOR must accommodate for the shifting geometric
relationship between the eyes and the target. During head
translation orthogonal to the line of sight, the ideal ocular
response is inversely proportional to fixation distance. Thus
little or no eye movement is required during translation when
fixating a distant target, but progressively larger ocular responses are required to maintain fixation as the target nears.
Several studies have shown that translational LVOR responses indeed are modulated by fixation distance, particularly during transient or high-frequency motion where visual
or contextual influences are minimal (Busettini et al. 1994;
Paige 1989; Paige and Tomko 1991b; Paige et al. 1996a;
Schwarz and Miles 1991). The central signal responsible
for this modulatory influence is linked closely to a command
related to binocular vergence (Paige 1991; Paige and Tomko
1991b; Snyder et al. 1992) and, to some extent, accommodation of the intraocular lens (Schwarz and Miles 1991). The
frequency and amplitude-dependent limitations of the
vergence or accommodation influence remain to be explored.
This study extends previous work by providing a direct and
systematic quantification of response dynamics and linearity
of the translational LVOR while taking the kinematic requirements of binocular fixation distance into account.
METHODS
Subjects and surgical preparation
Experiments were performed using four male squirrel monkeys
(Saimiri sciureus) weighing 0.75–1.0 kg. All procedures were
done in accordance with guidelines established by an internal review board. Surgical preparation has been described in detail previously (Paige and Tomko 1991a). Briefly, ocular search coils for
eye movement recording and a head-fixation bolt for painlessly
positioning and fixing the head, were implanted using aseptic technique under inhalation anesthesia (isoflurane). A 6.4-mm-diam
stainless steel bolt, flattened along the shaft, was fixed to the back
of the skull using dental acrylic and stainless steel screws that were
inverted and anchored in keyhole slots. The flat surface of the bolt
was positioned parallel to the horizontal canal plane. After a lateral
canthotomy and conjunctival peritomy, a prefabricated Teflon-insulated stainless steel wire coil (12-mm diam, 3 turns; Cooner
AS631) was sutured to the sclera in the frontal plane of each eye,
and a smaller (8 mm, 4 turn) coil was sutured to the globe laterally
and close to the sagittal plane of the right eye. Twisted-pair leads
from each coil exited the eye temporally and were routed subcuta-
/ 9k1d$$oc09 J069-7
neously over the skull where they were soldered to mating connectors and anchored to the pedestal. Experiments were performed
following a minimum 2-wk recovery period.
Eye movement recording
Vertical, horizontal, and torsional eye movements were recorded
using the magnetic search coil technique (Robinson 1963) (implemented by Neurodata). Vertical and horizontal field coils were
mounted on an 18-cm3 Plexiglas cube that was attached rigidly to
the primate chair such that the coil was centered around the subject’s nose. Eye position signals were precalibrated in each plane
using a three-axis jig containing test coils identical to those implanted in the monkeys. The calibration jig also was used to eliminate electronic crosstalk between the channels to isolate responses
to each plane. However, physiological crosstalk remained because
the coils could not be positioned precisely in the frontal or sagittal
planes. This problem was negligible for the horizontal and vertical
signals derived from the frontal coil. In contrast, a misalignment
of the torsion coil into the eye’s frontal plane generated artifactual
torsional signals during purely vertical eye movements. This error
was minimized by using a summing amplifier to subtract a portion
of the vertical eye position signal from the torsional signal during
pitch oscillation in the light (Paige and Tomko 1991a), effectively
electronically ‘‘rotating’’ the coil into the sagittal plane of the eye.
Calibrations were confirmed at the start of each experimental
session with the subject in the apparatus. Horizontal and vertical
calibrations were verified by oscillating subjects sinusoidally in
yaw and pitch at 2.5 Hz (peak head velocity 257 /s) in the light.
Under these conditions, the visually enhanced AVOR compensates
nearly perfectly for movement of the head (Correia et al. 1985).
Further, we have found that the two eyes behave nearly identically
and reproducibly during these AVOR calibration checks, which
serve as an essential anchor for repeated testing on different days.
Torsional calibrations could not be verified the same way, but
AVOR responses to head roll proved stable during repeated sessions in all monkeys, and jig calibrations ensured system stability
over time, as observed in the other planes as well.
Binocular zeroing of eye position signals also was performed
routinely before each test session to ensure reproducible results
across data sets recorded on different days. A fixation spot located
in the subject’s midline at eye level 3.3 m away was used to adjust
the horizontal and vertical ‘‘zero positions’’. Each eye was zeroed
independently while the other was occluded. To ensure that the
subject was fixating, the lit target was oscillated horizontally and
vertically around the central fixation spot in an otherwise darkened
room. In the absence of other targets, subjects tended to pursue
the moving target without training. Periods of vertical smooth pursuit left horizontal eye position fixed, and these periods were used
to set the horizontal zero. Similarly, periods of horizontal smooth
pursuit were used to set the vertical zero position. A torsional zero
could not be so determined and instead was set as the average
torsional position after Ç20 s of distant fixation.
Motion of the field coils or the head relative to the chair during
translational oscillations was measured directly to quantify potential mechanical artifacts. Rigidity of the field coils was assessed
in several different orientations relative to gravity during motion
stimuli by rigidly fixing a test coil to the head restraint on the
primate chair. Head rigidity was evaluated by mounting a test coil
on the pedestal of one squirrel monkey while it was subjected to
a variety of motion profiles. Field coil flex and head motion relative
to the chair together accounted for õ2% of the total recorded
ocular responses at 4.0 Hz and were negligible at lower frequencies.
Stimulus generation
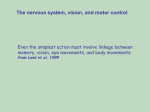
A multiaxis motion control device (Acutronic USA, Pittsburgh,
PA) was used to produce all stimuli (Fig. 1). The device consisted
09-15-97 14:07:53
neupa
LP-Neurophys
SQUIRREL MONKEY LINEAR VESTIBULOOCULAR REFLEX
1777
FIG . 1. Apparatus used to generate linear motion profiles.
The translational axis consisted of a 1.2-m-long linear sled
(T) mounted on top of an angular rate table (R). A carriage
attached to the sled supported a superstructure that contained
several angular positioning axes (P1–P3), which were used
to place subjects in different orientations relative to the sled’s
motion axis and to gravity. P1 allowed the cantilevered arm
of the superstructure to be oriented orthogonal (as shown in
Fig. 1) or parallel to the linear sled. The primate chair was
held in a second angular positioning axis (P2) that was used
to manually fix the subject in any yaw position relative to
the cantilevered arm. An angular positioning axis (P3) was
servo-controlled and was oriented earth horizontally. It was
used to alter and fix the subject’s orientation relative to gravity.
of three motorized axes integrated with a computer-driven
multiaxis servo controller (Acutrol, ACT 2000). The main rotation
axis (R in Fig. 1) was driven by a 104 ft-lb DC motor, which
rotated the entire sled and superstructure around an earth-vertical
axis. For this experiment, it was used only for angular calibration
trials. A 1.2-m-long linear sled (T in Fig. 1) was mounted on top
of the main rotation axis. A sled carriage translated smoothly along
the sled on precision roller bearings. The carriage was coupled to
a DC servo motor with a steel-reinforced timing belt that formed
a continuous loop around the long axis of the sled with the aid of
pulleys at each end. The sled could oscillate its payload at °5.0
Hz, 0.75 g peak acceleration. The sled’s carriage supported a superstructure with several angular positioning axes (Fig. 1, P1-P3) that
were used to fix the head in different orientations relative to the
sled’s motion axis and to gravity.
Mechanical calibrations were performed using a miniature threeaxis accelerometer (Entran EGAL3 12S-10D) mounted on various
components of the sled and primate chair. Correction factors (primarily due to belt-stretch) for acceleration amplitude and phase
were calculated and propagated throughout subsequent analyses.
Experimental protocol
Subjects were restrained in the primate chair with their heads
fixed in the stereotaxic plane using the bolt implanted on the skull.
The chair’s positioning axes (Fig. 1) were manipulated to fix subjects in one of three head orientations relative to gravity; nose-up
(NU), right-side down (RD), or upright (UP). Two orthogonal
head orientations were studied for each axis of motion. Thus the
LVOR was studied with the head UP and NU during IA motion
and with the head RD and NU during DV motion.
Sinusoidal linear motion profiles were generated directly by the
Acutrol system. Subjects were oscillated at four frequencies between 0.5 and 4.0 Hz and at several amplitudes between 0.1 and
0.7 g peak acceleration, as listed in Table 1. To obtain a sufficient
quantity of data in each experimental condition, subjects were run
multiple times over different days, with individual recording sessions generally lasting 2–3 h. The order of stimulus frequencies
/ 9k1d$$oc09 J069-7
and amplitudes was randomized on different days and was different
for each subject. Early experiments revealed that results were reproducible across different test sessions for a given animal and
experimental condition (head orientation and stimulus parameters)
and therefore were pooled for each monkey in all analyses detailed
below.
Visual targets were used to engage the subject’s attention to
manipulate fixation distance (vergence). At high-stimulus frequencies, which entailed small translational excursions, small attentiongrabbing objects (e.g., food, toys) were held at varying distances
from the subject. For lower frequency translations, in which linear
excursions were large, a long board covered with high-contrast
objects provided a continuous array of earth-fixed targets during
motion. To obtain LVOR responses in darkness, the light was
TABLE
1.
Stimulus parameters
Frequency,
Hz
Peak acceleration,
g
Peak velocity,
cm/s
Peak excursion,
cm
0.5
0.5
0.5
0.5
1.0
1.0
1.0
1.0
2.0
2.0
2.0
2.0
2.0
2.0
4.0
4.0
4.0
4.0
4.0
0.10
0.20
0.30
0.40
0.10
0.20
0.30
0.40
0.10
0.21
0.32
0.42
0.54
0.65
0.10
0.24
0.38
0.53
0.67
31.2
62.5
93.7
124.9
15.6
31.2
46.8
62.5
7.8
16.4
25.0
32.8
42.2
50.7
3.9
9.4
14.8
20.7
26.2
9.9
19.9
29.8
39.8
2.5
5.0
7.5
9.9
0.6
1.3
2.0
2.6
3.4
4.0
0.2
0.4
0.6
0.8
1.0
09-15-97 14:07:53
neupa
LP-Neurophys
1778
L. TELFORD, S. H. SEIDMAN, AND G. D. PAIGE
The ideal LVOR response ( ui ) is determined by the magnitude of
the head translation (z) and the target distance (d) according to
the following derivation
ui Å tan 01
z
x
(1)
from which an ideal sensitivity (Si ) can be derived, given that x Å
d cos ui
Si Å
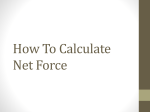
FIG . 2. Kinematics of the ideal linear vestibuloocular reflex (LVOR)
response ( ui ) required to maintain fixation on a visual target (banana) at a
given distance (d) during head translation (z) along the dorsoventral (DV)
axis. This relationship, which is presented mathematically in METHODS (Eqs.
1–3), can be approximated by a simple linear function relating response
sensitivity (S) and vergence angle. These LVOR response requirements
apply equally well to interaural (IA) head translation.
extinguished for intervals lasting several seconds, yielding several
alternating light-dark periods. Large vergence angles generally
were maintained only briefly in darkness after presentation of visual
targets, but the repeated light-dark transitions produced a sufficient
number of cycles over a large range of vergence angles.
Data analysis
Binocular horizontal and vertical, and
monocular torsional eye position signals (5 total), as well as sled
velocity and on/off light sensor signals, were sampled at 200 Hz
by an IBM-compatible computer and stored for off-line analysis
(Telford et al. 1996). During analysis, the software defined individual cycles by identifying zero-crossings of the stimulus. All eye
position signals were digitally differentiated and smoothed to yield
eye velocities. For 4.0-Hz stimuli, a large number of cycles were
available that were saccade-free. These were selected for analysis,
whereas those containing saccades were discarded. At lower frequencies, saccades were removed from eye-velocity records using
an interactive paradigm that performed an iterative least-squares
sinusoidal fit and windowing procedure. For all frequencies, individual cycles across all five ocular response signals were selected
simultaneously and subjected to harmonic analysis on a cycle-bycycle basis. To ensure that translational LVOR responses were not
influenced by vision, we included only complete cycles that began
¢250 ms after the lights were extinguished. Least-square fits at
the fundamental frequency then were used to calculate sensitivity
[peak slow phase eye velocity (in deg/s)/peak linear head velocity
(in cm/s); reducing to deg/cm], phase (phase of eye velocity
relative to phase of head velocity), and mean eye position over
each cycle and for all five ocular response signals. The right eye
was used as the reference for all further analysis and figures, with
the important exception that mean vergence was calculated as the
difference between left and right mean horizontal eye position for
each cycle.
KINEMATICS OF THE LVOR. To assess the influence of fixation
distance on LVOR responses, vergence angle was linked with sensitivity and phase measures on a cycle-by-cycle basis. Vergence is
expressed in meter angles (MA), the reciprocal of fixation distance.
For example, 1 MA would be required for binocular fixation of a
target located 1 m away, and 2 MA would be required for a target
at 0.5 m. This unit provides a form of vergence normalization that
allows direct comparisons between different subjects and species
regardless of head size and ocular separation (1.7 cm in squirrel
monkeys).
Figure 2 illustrates the geometry of compensatory LVOR responses to linear motion along the DV (shown) or IA head axes.
HARMONIC ANALYSIS.
/ 9k1d$$oc09 J069-7
Ì ui
Å
Ìz
1
1/
SD
z
x
2
1
1
r Å cos ui
x d
(2)
For small angles, cos u É 1, and therefore Si É 1/d (in rad/m).
Converting units
1
Si Å 0.57r Å 0.57r£ ,
d
(3)
where £ is vergence in MA, and Si is in deg/cm.
Equation 3 demonstrates a simple linear relationship between
ideal LVOR sensitivity (Si ) and vergence (MA), governed by a
scale factor of 0.57 7rcm01rMA 01 . Actual LVOR response sensitivities (S) indeed demonstrate a similar linear relationship with
vergence (Paige 1991; Paige and Tomko 1991a; Schwarz and Miles
1991).
Analysis proceeded in steps by which sensitivities and phases
for each of the five response signals were first combined into 1
MA bins from 0 to 10 MA and then subjected to regressions to
produce best fit lines to the data, yielding sensitivity slopes (typically õ0.57 7rcm01rMA 01 ), intercepts (response sensitivity at 0
MA vergence), and phase angles as a function of vergence. The
number of cycles represented in each bin varied as a function of
frequency and vergence. At 4 Hz, dozens of cycles were available
at lower vergences, declining to typically 4–10 at the highest
vergences. At 0.5 Hz, typically 4–10 cycles were available at the
lowest vergence bins, but we could not usually obtain data at
ú4 MA of vergence. This is because large vergence angles are
maintained only briefly in darkness and tend to drift toward a
modest value of Ç1 MA (Telford et al. 1996). Sufficiently stable
vergences could be achieved up to Ç4 MA for the 2 s required to
cover a cycle at 0.5 Hz, and several such cycles could be obtained
after repeated presentations of targets. The same holds for 1 Hz.
In contrast, at 2 and 4 Hz, even briefly held vergences were sufficient to link high vergences with LVOR response cycles. Because
vergence could change during a cycle, presumably modulating
LVOR performance accordingly, cycles were excluded if large and
erratic changes in vergence occurred midcycle. Shifts in vergence
otherwise presented little problem, because the relationship between vergence and LVOR response amplitude is linear (Paige
and Tomko 1991b; Schwarz and Miles 1991). Within-cycle shifts
in vergence are matched by shifts in sensitivity within the cycle,
and both parameters are derived from the entire cycle. One caveat
is that changes in LVOR sensitivity precede shifts in actual
vergence angle (Paige and Tomko 1991b; Snyder et al. 1992), and
perhaps this factor might distort results. Quantification of the precise latency difference has proven problematic, but the difference
averaged only 49 ms in the study by Snyder et al. (1992). Any
influence of this small difference would appear in the noise (standard deviations) of averaged binned data presented and plotted
below. Errors due to latency differences between vergence and
LVOR responses are small and cannot account for the robust interaction observed between them.
SIGN CONVENTION. Results are presented with reference to a sign
and axis convention used previously (Paige and Tomko 1991a,b).
Three cardinal axes of the head are used to describe linear motion,
designated X (nasooccipital; positive out the front of the head), Y
09-15-97 14:07:53
neupa
LP-Neurophys
SQUIRREL MONKEY LINEAR VESTIBULOOCULAR REFLEX
(IA; positive out the left ear), and Z (DV; positive out the top of
the head). Rotations around these axes are termed roll (around X ),
pitch (around Y ), and yaw (around Z ), where positive rotations are
assigned according to a left-hand rule. This corresponds to rightside up, upward, and rightward positive rotations around the X , Y,
and Z axes, respectively, in accordance with traditional standards.
The same rotatory sign convention applies to eye movements. A
peculiarity arises for the horizontal LVOR during IA motion because translation leftward and ocular rotation rightward are both
positive. In contrast, upward translation (positive) produces downward (negative) eye movement. We have inverted the sign of IA
head motion throughout this study to maintain consistency between
the IA-horizontal and the DV-vertical LVOR during analysis and
for plots. Ocular responses are traditionally 1807 out-of-phase to
head rotations and translations but are represented here as 07 to
depict the expected compensatory behavior.
RESULTS
General observations
LVOR response sensitivities during IA and DV translation
were generally largest at the highest stimulus frequency of
4.0 Hz. Examples of eye movements from one subject during
IA and DV translation at 4.0 Hz, 0.2 g peak acceleration,
are shown in Figs. 3 and 4, respectively. IA head translations
with the head in the UP orientation generated large smooth
conjugate responses (shown only for the right eye) in the
horizontal plane (Fig. 3B) that were compensatory for head
motion (Fig. 3A). Vertical ocular responses were effectively
absent (Fig. 3C), but small torsional responses were recorded (Fig. 3D; see legend). A similar response pattern
was observed during IA translation with the head oriented
NU. During DV motion with the head NU or RD (NU
orientation shown in Fig. 4), conjugate vertical (Fig. 4C)
responses were generated, but horizontal (Fig. 4B) and torsional (Fig. 4D) responses in darkness were typically negligible (see Fig. 4 legend).
For IA (Fig. 3) and DV (Fig. 4) head translations, the
primary compensatory ocular responses, IA-horizontal and
DV-vertical, respectively, were modulated strongly by fixation distance, as measured by vergence angle. The high
vergence associated with near fixation typically was initiated
in the light (bold bars above Figs. 3A and 4A). When the
light was extinguished, vergence gradually declined to Ç1
MA, the typical ‘‘dark vergence’’ in squirrel monkeys (Telford et al. 1996). IA-horizontal and DV-vertical ocular responses were large when vergence was high and declined
as vergence decreased. This effect was most apparent at high
frequencies of stimulation. In the sections that follow, the
interaction between vergence angle and stimulus frequency
is considered in detail for each axis of head translation,
followed by an assessment of LVOR response linearity.
Influence of stimulus frequency and fixation distance on
LVOR responses
IA-HORIZONTAL LVOR. Figure 5 shows sensitivity and phase
of the IA-horizontal LVOR in one monkey as a function of
vergence at each of the four stimulus frequencies and with
peak head acceleration fixed at 0.2 g. The apparent linear
relationship between LVOR response sensitivity and
vergence generally was quantified using linear regressions
/ 9k1d$$oc09 J069-7
1779
for all subjects. Results are exemplified in Fig. 5 as fine
lines, whereas the equations for these lines are listed in the
key in the form, S Å m£ / b, where m and b correspond to
the sensitivity slope and intercept of the least-square fit,
respectively, and £ is vergence in MA. The bold lines in
Fig. 5 illustrate the ideal LVOR sensitivity (0.57£ / 0; see
METHODS, Eq. 3) as a function of vergence required to stabilize the point of binocular fixation in space. For all subjects
and for both UP and NU head orientations, sensitivity slopes
(m in degrcm01rMA 01 ) were near zero at 0.5 Hz but increased with increasing stimulus frequency. The coefficients
of determination (r 2 values, which indicate the proportion
of variation explained by the linear regression model) of the
least-square fits were large and increased with increasing
frequency (r 2 ranged from 0.62 to 0.94 over the 0.5–4.0
Hz range of frequencies in all subjects), suggesting that
responses were more robust at higher frequencies. However,
even the sensitivity slope at 4.0 Hz was only slightly greater
than half the ideal response.
The point where the sensitivity versus vergence functions
intersect the y axis (see Fig. 5, sensitivity) provides an extrapolation of the LVOR response to zero vergence. This
sensitivity intercept (like slope) increased with increasing
stimulus frequency in all animals, despite the fact that no
LVOR response is required at zero vergence. Note that a
positive intercept results in sensitivities closer to ideal across
the vergence range than if the intercept was zero (see DISCUSSION ).
Response phases also are shown in Fig. 5 as a function
of vergence angle. Positive values represent phase leads relative to the ideal of zero (bold traces), whereas negative
values indicate phase lags. All IA-horizontal responses led
head velocity, but these leads were greatest at the lowest
frequencies. The fine traces for phase represent averaged
values across all vergence angles at each frequency, because
phase was not systematically or consistently modified by
vergence. This was true for DV-vertical responses as well
(see below).
IA-horizontal response sensitivities were further processed by averaging slopes and intercepts from regression
equations across all monkeys and acceleration amplitudes
and then plotting parameters as a function of stimulus frequency. Phases simply were averaged across all vergence
angles, subjects, and acceleration amplitudes. Averaging
across stimulus amplitudes is justified by the nearly linear
performance of the LVOR over a broad range of peak accelerations (detailed below). The results are presented in Fig.
6. The majority of the variance in IA-horizontal LVOR parameters (error bars depict standard deviations) is due to
between (not within) subject differences. This also holds
for DV-vertical responses as a function of frequency and for
both reflexes as a function of stimulus amplitude (see section
on linearity below).
The data were analyzed statistically by a two-way repeated-measures analysis of variance (ANOVA; 2 head orientations and 4 stimulus frequencies) performed on each of
three LVOR response parameters (sensitivity slope, intercept, and phase). Average sensitivity slopes were positive
at all frequencies and increased significantly with increasing
frequency [F3,9 Å 29.57, P õ 0.001; where the df correspond
to (4 frequencies 0 1) and (4 frequencies 0 1) 1 (4 sub-
09-15-97 14:07:53
neupa
LP-Neurophys
1780
L. TELFORD, S. H. SEIDMAN, AND G. D. PAIGE
FIG . 3. Raw ocular responses from 1
subject showing horizontal (B), vertical
(C), and torsional (D) eye movements
(right eye) during IA translation with the
head upright (UP) at 4.0 Hz (0.2 g peak
head acceleration). Head velocity is shown
in A. At the beginning of the trial, the subject
was shown a near visual target in the light
(bold bar above A). Once a large vergence
angle (bold trace in A) was elicited, the
lights were extinguished and vergence declined gradually to near 0. Gap in the
vergence trace corresponds to a saccadic eye
movement along with a blink (B– D), which
would have been removed during data analysis. Note the robust horizontal response and
its apparent modulation by vergence. A
small torsional response also is seen (noisy
and variable in this case) but is not so clearly
related to vergence.
jects 0 1), or ‘‘3,9’’], confirming that IA-horizontal LVOR
responses are most sensitive to the effects of fixation distance
at the highest frequencies. The sensitivity intercepts were
also positive and increased significantly with increasing
stimulus frequency (F3,9 Å 17.49, P õ 0.001). Response
phase was variable and showed a large lead relative to head
velocity at 0.5 Hz, but this lead (and variance) declined
significantly with increasing frequency (F3,9 Å 13.54, P õ
0.001).
Data in Fig. 6 also were used to evaluate potential differ-
/ 9k1d$$oc09 J069-7
ences in the IA-horizontal LVOR as a function of head orientation. Sensitivity slopes and phases did not differ significantly between the NU and UP head orientations, and although sensitivity intercepts recorded with the head NU were
significantly lower than those in the UP orientation (F1,3 Å
39.73, P õ 0.01), the difference was small.
IA-TORSIONAL LVOR. In addition to the large horizontal
LVOR responses observed during IA head translation, small
torsional responses (IA-torsional LVOR) were generated simultaneously at all frequencies (see Fig. 3 for an example
09-15-97 14:07:53
neupa
LP-Neurophys
SQUIRREL MONKEY LINEAR VESTIBULOOCULAR REFLEX
1781
FIG . 4. Raw responses from a single
subject showing horizontal (B), vertical
(C), and torsional (D) ocular responses
(right eye) during DV translation with the
head nose-up (NU) at 4.0 Hz (0.2 g peak
head acceleration). Bold bars above the
head velocity trace in A indicate when the
target was visible. Vergence angle is represented by the bold trace in A. Note the
prominent vertical response and its relationship with vergence. Interestingly, just
before the initial target is extinguished, a
brief horizontal and torsional response is
seen (corresponding to a Ç0.17 ocular excursion). These are sporadic, occur also
with the light off, seem most prominent at
high vergences, and are not always locked
with the stimulus frequency. They remain
mysterious, but add noise (variance) to the
data set.
at 4.0 Hz). Figure 7 (top) shows mean torsional sensitivities
from three subjects (torsional data were unavailable from
the fourth subject due to lateral coil failure) as a function
of vergence angle. Results from the UP and NU head orientations have been averaged because a three-way (head orientation, stimulus frequency, vergence angle) within-subjects
ANOVA indicated that results from UP and NU orientations
did not differ significantly (see DISCUSSION ). Sensitivities
were not significantly modulated by vergence angle, in
marked contrast to IA-horizontal responses, which were
highly dependent on vergence (see Figs. 5 and 6).
/ 9k1d$$oc09 J069-7
In contrast to sensitivity slope, the IA-torsional response phase
(not shown) was highly variable; some responses were in phase
with head velocity, whereas others were out of phase. Response
phase was not systematically influenced by either stimulus frequency or vergence angle. The generally small IA-torsional sensitivities probably account for the variable phase; as the signalto-noise ratio is reduced, phase becomes increasingly variable
and eventually becomes meaningless.
It has been suggested previously that IA-torsional responses
are compensatory not for head translation but rather for the
effective head tilt (roll) associated with IA acceleration (Paige
09-15-97 14:07:53
neupa
LP-Neurophys
1782
L. TELFORD, S. H. SEIDMAN, AND G. D. PAIGE
FIG . 5. Horizontal response sensitivities and phases for 1
subject during IA translation at 0.2 g peak head acceleration
in the UP and NU head orientations plotted as a function of
vergence angle. Here and in Fig. 8, responses have been averaged into 1 meter angle (MA) bins of vergence, and each point
represents a mean value at its corresponding mean vergence
within the bin. Error bars represent standard deviations within
bins. Fine lines in the sensitivity graphs represent first-order
linear regressions. Equations for these regressions appear in
the key in the form, S Å m£ / b, where m is the slope of the
line and b is the y intercept. Fine lines and the values in the
key in the lower graphs represent phases ( P) averaged across
all vergence angles. By convention, a compensatory response
corresponds to a phase of 07 as shown here and in other figures.
Note that phases have been omitted for the 0–1 MA bin for
the 2 lowest frequencies. This is because phase becomes highly
variable if not meaningless when response sensitivity is near
0 (a signal-to-noise problem). Bold lines in all panels show
ideal response properties based on geometric considerations.
and Tomko 1991a). To address this perspective, Fig. 7 (bottom)
shows torsional sensitivities replotted in terms of tilt gain (G;
torsional eye position/effective head roll position) using the
following equation
GÅ
Sr ar981
tan 01 (a)r(2pf ) 2
(4)
where a is stimulus acceleration (0.3 g for all frequencies
in Fig. 7, and gravitational acceleration, g, is 981 cm/s 2 ).
Data have been averaged across all vergence angles and are
plotted as a function of stimulus frequency. Tilt gains were
generally small ( õ0.05) but showed a clear frequency-dependence, declining with increasing frequency.
DV-VERTICAL LVOR. Vertical responses during DV translation closely resembled IA-horizontal responses and were analyzed in the same way. Figure 8 shows DV-vertical LVOR
response sensitivities and phases plotted as a function of
vergence for two head orientations (NU and RD) from the
same subject represented in Fig. 5. Regressing sensitivity
against vergence revealed sensitivity slopes and intercepts
that generally increased with increasing stimulus frequency.
Responses for this particular subject in the NU orientation
were unusual in that the LVOR response at 1.0 Hz was
atypically small; the remaining subjects demonstrated larger
responses at 1.0 than at 0.5 Hz. The coefficients of determination of the least-square linear fits increased with increasing
stimulus frequency (r 2 values in both head orientations were
0.28 at 0.5 Hz and ranged between 0.86 and 0.97 for the
remaining stimulus frequencies). Response phases (Fig. 8)
for the two head orientations generally led head velocity,
though small lags were sometimes observed at 4.0 Hz in
/ 9k1d$$oc09 J069-7
this and other subjects in the RD orientation at small
vergence angles.
Figure 9 shows DV-vertical sensitivity slopes, intercepts,
and phases for both the NU and RD head orientations averaged across subjects. Figure 9 is in the same form as Fig.
6, facilitating a direct comparison between DV-vertical and
IA-horizontal LVOR response properties. The DV-vertical
sensitivity slope (F3,9 Å 18.78, P õ 0.001), intercept (F3,9 Å
5.70, P õ 0.05), and phase (F3,9 Å 17.29, P õ 0.001) were
all significantly influenced by stimulus frequency. Sensitivity slopes and intercepts increased with increasing frequency
while phase lead declined. Results were nearly the same for
the NU and RD head orientations. However, the sensitivity
slope was significantly larger when the head was in the
RD orientation than when NU (F1,3 Å 73.30, P õ 0.005).
Intercepts and phases were statistically indistinguishable for
the two head orientations.
Linearity of LVOR responses
In previous sections, LVOR response properties were analyzed as a function of frequency for two different head orientations relative to gravity during both IA and DV motion.
Response linearity was not considered, and responses from
all acceleration amplitudes were pooled. We now directly
assess potential amplitude-dependent nonlinearity in the IAhorizontal and DV-vertical LVORs over a broad range of
stimulus intensities. Mean sensitivity slopes, intercepts, and
phases are illustrated in Fig. 10 as a function of peak head
acceleration at each stimulus frequency and for both IA and
DV motion. Responses from the two head orientations for
each motion axis have been pooled. The mean sensitivity
09-15-97 14:07:53
neupa
LP-Neurophys
SQUIRREL MONKEY LINEAR VESTIBULOOCULAR REFLEX
1783
To this point, the IA-horizontal and DV-vertical LVORs
have been treated separately, despite their similarity in performance and common theoretical goal (Eqs. 1–3). The
data set underlying Fig. 10 provides a convenient means to
quantify the similarity between the two. A three-way repeated-measures ANOVA was performed (stimulus amplitude, motion axis, and frequency) on each response parameter (sensitivity slope, intercept, and phase). Because the two
lowest stimulus frequencies could be run only up to 0.4 g
due to limitations in sled length (see Table 1), statistical
comparisons were performed only for the first four amplitudes. Note that these accelerations differ slightly at each
frequency (Table 1), but the values are sufficiently close
for this purpose. Analysis of the effect of motion axis (IA
vs. DV) revealed only a modest statistical significance for
phase lead, which proved greater for the DV-vertical than
the IA-horizontal LVOR (F1,6 Å 13.54, P õ 0.05). As in
the previous analysis, all three response parameters were
significantly influenced by stimulus frequency.
Perhaps the LVOR displays an amplitude-dependent non-
FIG . 6. Mean sensitivity slopes, intercepts, and phases in response to
IA translation in the UP ( ● ) and NU ( j ) head orientations plotted as a
function of stimulus frequency. Data from all acceleration amplitudes have
been pooled. Positive phase values represent leads, whereas negative values
are lags. Error bars represent standard deviations between subjects.
slope and intercept both remain flat or increase slightly as
stimulus amplitude rises, while phase generally declines.
To quantify LVOR nonlinearity, regressions of each response parameter (sensitivity slope, intercept, and phase) on
peak head acceleration were performed for each monkey and
at the two frequencies (2 and 4 Hz) at which the translational
LVOR is most robust and where the broadest range of stimulus amplitudes were available. The mean and variance of
the regression slopes then provide a convenient measure of
nonlinearity. The decline in phase with increasing stimulus
amplitude proved statistically significant at both frequencies
and for both axes of motion (P õ 0.025 for DV vertical at
2 Hz and P õ 0.001 for the others). In contrast, the only
significant nonlinearity among sensitivity parameters was an
increase in DV-vertical sensitivity slope with rising stimulus
amplitude at 4 Hz (P õ 0.025). Note that the amplitudedependent effects observed actually constitute improvements
in compensatory LVOR performance as peak head acceleration rises, not deteriorations.
/ 9k1d$$oc09 J069-7
FIG . 7. Mean torsional sensitivities during IA translation (responses in
UP and NU head orientations did not differ and have been pooled) are
shown (top). Same data, averaged across all vergence angles, are replotted
in terms of effective ‘‘tilt gain’’ (bottom; see RESULTS, Eq. 4). Error bars
show standard deviations between subjects.
09-15-97 14:07:53
neupa
LP-Neurophys
1784
L. TELFORD, S. H. SEIDMAN, AND G. D. PAIGE
FIG . 8. Vertical response sensitivities and phases for a single subject during DV translation at 0.2 g peak head acceleration with the head in the NU and RD orientations, plotted as a
function of vergence angle (averaged into 1-MA bins) as in
Fig. 5. Error bars represent standard deviations within bins.
Fine lines represent first-order linear regressions for sensitivity
and average values for phase, whereas the bold lines show ideal
response properties.
linearity, such as saturation or distortion, that might go undetected in a simple analysis of sensitivity and phase parameters. To assess this possibility, harmonic distortion was quantified across stimulus amplitudes at 2 Hz. This frequency
was chosen because it represents a reasonable compromise
between signal intensity and sample size for the analysis.
Distortion proved nearly constant for IA-horizontal responses, averaging 8% over the range of stimulus amplitudes. Distortion was higher for DV-vertical responses,
likely due to slightly increased but fixed vibration introduced
into the stimulus (particularly influential at low accelerations) when the subject and mechanical superstructure was
oriented for DV motion. Distortion averaged 15% at the
lowest stimulus amplitude but dropped with rising amplitude
to reach 7% at the highest peak acceleration. Thus sinusoidal
LVOR responses, if anything, tended to improve as peak
acceleration increased, presumably due to improved signalto-noise ratio.
In this experiment, fixation distance ( vergence ) and
stimulus frequency were the only variables we examined
that exerted a major and systematic influence on LVOR
response parameters. Other factors, including head orientation, motion axis, and acceleration amplitude, had only
minor and somewhat idiosyncratic influences. Thus the
main findings concerning translational LVOR responses
can be summarized by averaging data from all subjects,
head orientations, motion axes, and acceleration amplitudes. Table 2 provides a synopsis of translational LVOR
response dynamics. Note that the sensitivity slopes and
intercepts rise with increasing stimulus frequency,
whereas phase lead declines. These characteristics are
consistent with high-pass dynamics.
/ 9k1d$$oc09 J069-7
DISCUSSION
Overview
This study characterizes the dynamics of LVOR responses
during high-frequency sinusoidal linear translations in the
squirrel monkey. Several important variables that influence
the LVOR are quantified, including the frequency and amplitude of stimulation, binocular fixation distance, and head
orientation relative to the axis of motion and to gravity.
These experiments extend the work of Paige and Tomko
(1991a,b), which provided an initial characterization of
squirrel monkey LVOR function in three orthogonal axes of
head translation. Two classes of LVOR were described. The
first, the translational LVOR, maintains binocular foveal
fixation on targets in space during linear motion. Translational LVORs include horizontal responses to interaural head
motion (IA-horizontal), vertical responses to dorsoventral
motion (DV-vertical), and complex (horizontal and vertical) responses to nasooccipital motion. Translational LVORs
are modulated by fixation distance, in accordance with geometric requirements. The second class of LVOR includes
torsional responses during IA motion (IA-torsional) and vertical responses during nasooccipital motion. These responses
cannot be compensatory for translation because they do not
maintain image stability during linear motion and are therefore visually destructive. Instead, they are best characterized
as tilt responses.
The fact that translational and tilt responses occur simultaneously, as is the case for horizontal and torsional responses
during IA motion, reflects a fundamental ambiguity in otolith
input; otolith responses cannot distinguish between linear
accelerations due to head-tilt relative to gravity and those
09-15-97 14:07:53
neupa
LP-Neurophys
SQUIRREL MONKEY LINEAR VESTIBULOOCULAR REFLEX
1785
been studied without directly measuring vergence (Busettini
et al. 1994; Israël and Berthoz 1989; Oas et al. 1992; Paige
1989; Skipper and Barnes 1989). Third, the linearity of the
LVOR had remained unexplored. In summary, the previous
literature provides an incomplete depiction of LVOR response dynamics.
The current study addresses these shortcomings and systematically quantifies a subset of translational and tilt LVOR
responses as a function of stimulus frequency and amplitude,
binocular fixation distance (as measured by vergence angle),
and head orientation relative to the axis of motion and to
gravity. A high-frequency bandwidth (0.5–4 Hz) was selected to focus on the physiological range of translational,
rather than tilt, responses. Translational LVOR responses
(IA-horizontal and DV-vertical) were shown to be influenced strongly and systematically by stimulus frequency,
consistent with high-pass dynamics, as well as binocular
fixation distance (vergence). Although the influence of head
orientation relative to gravity, acceleration amplitude, and
motion axis on some LVOR response parameters were statistically significant, the effects were generally small and
largely idiosyncratic. Tilt LVOR responses (IA-torsional)
also were influenced strongly by stimulus frequency, but, in
contrast to translational responses, behaved with low-pass
dynamics. Further, the IA-torsional responses, unlike translational responses, were not systematically modulated by
fixation distance.
Influence of stimulus frequency and fixation distance on
the LVOR
FIG . 9. Mean vertical sensitivity slopes, intercepts and phases during
DV translation in the RD ( ● ) and NU ( j ) head orientations as a function
of stimulus frequency. Data from all acceleration amplitudes have been
pooled. Error bars represent standard deviations between subjects.
generated by translation. However, the oculomotor responses
required to compensate for tilt and translation differ. A partial resolution of this ambiguity is to parse linear accelerations according to their frequency content (or persistence),
such that high-frequency (transient) stimuli are registered
as translation and low-frequency (prolonged) accelerations
as tilt (Guedry 1974; Mayne 1974). This concept has received experimental support (Angelaki and Hess 1996b;
Paige and Tomko 1991a) and is consistent with results reported here.
Several factors have impeded a comprehensive understanding of LVOR function. First, although the modulatory
influence of fixation distance (vergence) on LVOR performance had been quantified, its frequency dependence was
unknown. Previous studies limited translational stimuli to
either single high-frequency sinusoids (3.0–5.0 Hz) (Paige
1989, 1991; Paige and Tomko 1991b), transients (Busettini
et al. 1994; Schwarz and Miles 1991), or frequencies õ2.0
Hz (Oas et al. 1992; Shelhamer et al. 1995; Skipper and
Barnes 1989). Second, the translational LVOR often has
/ 9k1d$$oc09 J069-7
TRANSLATIONAL LVOR. A linear relationship between translational LVOR response amplitude and reciprocal fixation
distance is now well established for both IA-horizontal (Busettini et al. 1994; Paige and Tomko 1991b; Paige et al.
1996a; Schwarz and Miles 1991), and DV-vertical (Paige
1989, 1991; Paige and Tomko 1991b) responses. This relationship is expressed conveniently as regressions of response
sensitivity on vergence angle. The modulation of the LVOR
by vergence then is given by the slope, whereas the intercept
represents the LVOR response at zero vergence. Our findings
suggest that both the slope and intercept are frequency dependent and have similar dynamics. Both are lowest at 0.5
Hz and increase dramatically with increasing frequency.
Note that the influence of frequency and vergence on the
LVOR are independent. At a given frequency, there is a
quantifiable influence of vergence on LVOR sensitivity, and
at a particular value of vergence, there is a quantifiable influence of frequency.
Like sensitivity, LVOR response phase is also dependent
on stimulus frequency. Responses displayed a large lead at
the lowest frequency, which declined to near zero by 4.0
Hz. However, in contrast to sensitivity, phase is generally
insensitive to fixation distance. Taken together, the frequency-dependent characteristics of the translational LVOR
are consistent with the operation of a high-pass filter within
LVOR pathways, along with a multiplicative influence by a
signal related to vergence, as modeled previously (Paige and
Tomko 1991b) and reformulated below.
Given a more complete understanding of LVOR response
dynamics and the modulatory influence of fixation distance,
09-15-97 14:07:53
neupa
LP-Neurophys
1786
L. TELFORD, S. H. SEIDMAN, AND G. D. PAIGE
FIG . 10. Mean IA-horizontal and DV-vertical LVOR
sensitivity slopes, intercepts, and phases for all subjects
as a function of peak head acceleration for each stimulus
frequency. Horizontal responses from UP and NU head
orientations have been pooled for IA translations, and
vertical responses from NU and RD head orientations
have been pooled for DV translations. Error bars represent standard deviations between subjects. Most of the
apparent variance corresponds to between-subject differences.
we now can resolve much of the controversy that exists
in the literature. Studies employing acceleration transients
(Busettini et al. 1994; Schwarz and Miles 1991) and highfrequency sinusoids ( ú2.0 Hz) (Paige 1989, 1991; Paige
and Tomko 1991b; Paige et al. 1996a) have demonstrated
that binocular vergence angle plays a substantial role in the
modulation of LVOR function, whereas those using stimuli
of modest frequency content ( °2.0 Hz) have shown a weak
or minimal influence (Oas et al. 1992; Shelhamer et al.
1995). Given the remarkably high-pass dynamics of the
LVOR, these seemingly disparate findings are actually quite
compatible.
What is the signal that conveys information about fixation
TABLE
2.
Frequency,
Hz
0.5
1.0
2.0
4.0
Mean translational LVOR response parameters
Sensitivity slope
degrcm01rMA01
0.03
0.08
0.23
0.31
{
{
{
{
0.03
0.05
0.08
0.11
Sensitivity intercept,
deg/cm
0.06
0.12
0.24
0.48
{
{
{
{
0.04
0.08
0.19
0.29
Phase,
deg
42
38
24
10
{
{
{
{
28
18
9
9
Values (expressed as means { SD) are averaged across subjects, head
orientations, motion axes and acceleration amplitudes. LVOR, linear vestibuloocular reflex.
/ 9k1d$$oc09 J069-7
distance and modulates LVOR sensitivity? Because modulation of LVOR responses can occur in darkness, candidate
signals cannot be visually based. Signals related to accommodation of the intraocular lens and vergence angle have
been proposed (Hine and Thorn 1987; Paige 1989; Post and
Leibowitz 1982: Schwarz and Miles 1991; Snyder et al.
1992). Both could provide appropriate signals related to
fixation distance, even in darkness, because they largely reflect signals underlying motor behavior. Hine and Thorn
(1987) used spherical lenses and base-out wedge prisms to
independently vary accommodation and vergence demand,
and concluded that the modulation of AVOR gain as a function of fixation distance is linked closely with changes in
vergence but not accommodation. Paige (1989, 1991) employed similar optical techniques and likewise observed that
changes in DV-vertical LVOR sensitivity are linked closely
with vergence angle, but not accommodation demand. These
studies employed human subjects. Monkeys may behave
somewhat differently, because accommodation has been
shown to influence the IA-horizontal LVOR (Schwarz and
Miles 1991), although less strongly and consistently than
vergence. The distinction may have little practical relevance,
however, because accommodation and vergence typically
operate together during natural behavior.
If signals related to vergence play a role in the modulation
09-15-97 14:07:53
neupa
LP-Neurophys
SQUIRREL MONKEY LINEAR VESTIBULOOCULAR REFLEX
of VOR responses, it is unlikely that this signal is an afferent
input from extraocular muscles or even an efference copy of
the same. This conclusion was reached by Snyder et al. (1992)
after examining the time course of shifts in VOR response
amplitude as compared with changes in vergence angle when
monkeys shifted gaze between targets at different fixation distances. Changes in the VOR preceded those in vergence angle
by 49 ms on average (reaching °200 ms in the extreme case).
Although the stimulus used (eccentric rotation) stimulated both
the AVOR and LVOR, qualitative observations on translational
LVOR responses alone (Paige 1991; Paige and Tomko 1991b)
provide confirmation. The signal responsible for modulating the
VOR is presumably a central premotor, or ‘‘motor command,’’
signal shared by both the VOR and vergence systems. Its source
remains undetermined.
Other influences, such as the context of target motion, also
may influence the VOR (Barr et al. 1976). In the human
LVOR, Paige et al. (1996a) found that tracking an imaginary
earth- or head-fixed target in darkness increases or decreases
LVOR sensitivity, respectively, in a vergence-dependent fashion. However, unlike the effect of vergence, this motion context
influences the LVOR only at relatively modest frequencies of
sinusoidal motion ( õ2.0 Hz) and thus resembles the dynamic
limitations of smooth pursuit.
How well does the translational LVOR match its kinematic
requirements (see METHODS, Eqs. 1–3)? Because IA-horizontal and DV-vertical LVORs are geometrically the same,
differing only in the axis of head motion and ocular response
plane, the behavior of these two reflexes also should be the
same. Indeed, only subtle differences in IA and DV responses
were observed, and both behaved nearly linearly over a broad
range of acceleration amplitudes. Although amplitude-dependent changes in some response parameters proved statistically
significant, the effects were generally small and somewhat idiosyncratic. At 4 Hz, where the translational LVOR is most
robust, response sensitivity rose slightly, whereas phase lead
declined. If anything, this tendency constitutes an improvement
in LVOR response as acceleration increases. In addition, as
head orientation relative to gravity is irrelevant for the translational LVOR on theoretical grounds (Paige and Tomko
1991a,b), no measurable influence of head orientation was
expected and indeed no systematic differences were observed.
The most notable disparity between observed LVOR responses and ideal geometry proved to be the influence of
vergence, even at 4.0 Hz where the effect was maximal. The
ideal LVOR has a sensitivity slope of 0.577rcm01rMA 01 ,
whereas observed slopes at 4.0 Hz averaged 0.317rcm01rMA 01
across head orientations and motion axes (Table 2) or 54% of
the ideal value. Another departure from ideal geometry is the
presence of a measurable LVOR response when binocular fixation distance is infinitely far (vergence is 0). The functional
utility of this sensitivity intercept, which also exists in humans
(Busettini et al. 1994; Paige et al. 1996a), is unclear. One explanation (Paige and Tomko 1991b) is that it confers enhanced
image stabilization over a broader range of fixation distances
than if the intercept was zero. Although an LVOR response at
zero vergence generates inappropriate retinal slip when fixating
distant targets, the actual retinal slip velocities are small and
typically under the threshold of oscillopsia (Paige and Tomko
1991b). However, the intercept effectively raises the response
sensitivity (adds a fixed value) at all vergence angles. This
/ 9k1d$$oc09 J069-7
1787
facilitates stabilization of visual objects within the subject’s haptic space. For example, in Figs. 5 and 8, the regression lines for
the LVOR at 4.0 Hz cross the geometrically ideal response line
at Ç1.7 MA of vergence. This corresponds to a fixation distance
of 60 cm. Thus the translational LVOR behaves nearly perfectly
for targets at this distance. That would not be the case in the
absence of a positive sensitivity intercept; the LVOR would
perform suboptimally for all fixation distances short of infinity.
The presence of the intercept incurs little cost but serves to
match LVOR behavior more closely with the ideal over a broad
range of fixation distances.
At frequencies õ4.0 Hz, the point at which sensitivity regression lines cross the ideal shifts to lower vergence values. Thus
at low frequency, only very distant targets can be stabilized
with the LVOR alone. However, this does not pose a functional
problem because visual following mechanisms can take over
for a failing LVOR at these lower frequencies (Paige et al.
1996a). The interaction between visual following mechanisms
and the AVOR is similar, except that a broad overlap exists
in their frequency bandwidths. The effective bandwidth of the
AVOR is extended by roughly an order of magnitude lower
in frequency than that of the LVOR (see Paige et al. 1996a).
The real mystery may be why the AVOR performs well over
such an extended low-frequency range despite the ability of
visual mechanisms to track and stabilize images.
TILT LVOR. Small torsional responses were observed during
IA head translation, confirming earlier observations by Lichtenberg et al. (1982) and Paige and Tomko (1991a). It has
been suggested that IA-torsional responses are compensatory
for head tilt and not translation (Paige and Tomko 1991a).
Recall that the otoliths respond to both tilt and translation,
and thus tilt responses may be generated in addition to translational responses during linear motion. Tilt angle is equivalent to the resultant sum of the gravitational and translational
accelerations (or ‘‘gravito-inertial force’’). When expressed
in terms of tilt-gain, torsional responses demonstrate a clear
decline as frequency increases from 0.5 to 4 Hz, as described
previously (Paige and Tomko 1991a). The data in squirrel
monkeys extend those from the human experiments of Lichtenberg et al. (1982), who examined torsional responses
across a lower frequency range (0.1–1.0 Hz). Unlike the
translational LVOR, there is no geometric requirement for
tilt responses to be modulated by changes in fixation distance. This expectation was confirmed experimentally.
One interesting caveat concerning the IA-torsional LVOR
is the absence of an influence of head orientation relative to
gravity. With the head in the UP orientation, IA acceleration
is equivalent to head roll-tilt, but with the head NU, IA
acceleration should combine with gravity to yield an effective head yaw. The appropriate tilt response should be torsional with the head UP and horizontal with the head NU.
This does not occur. Responses are always torsional and do
not differ between the two head orientations. Thus the IAtorsional LVOR, a presumed tilt response, is not compensatory for actual head tilt. Instead, the response is governed
only by linear acceleration along the IA axis, not the actual
angle of gravito-inertial force. The IA-torsional response is
best described as a ‘‘quasi-tilt’’ response, which is equivalent to a true tilt response only when the head is in the UP
orientation assumed during most natural behavior (Paige and
Tomko 1991a).
09-15-97 14:07:53
neupa
LP-Neurophys
1788
L. TELFORD, S. H. SEIDMAN, AND G. D. PAIGE
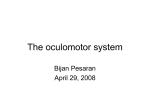
FIG . 11. Model of the translational and tilt LVORs driven by IA-sensitive otolith afferent input during IA head acceleration.
Tilt pathway (IA head acceleration is equivalent to head roll position) contains only a low-pass filter and scaling ( Gtilt ) to
produce torsional responses. Because only IA-acceleration drives the reflex, head orientation is irrelevant, as observed
experimentally. The translational pathway includes an integration and high-pass filter before splitting into 2 subpathways, 1
with a gain element (G2trans ) that accounts for the response at 0 vergence, and another with a gain element ( G1trans ) and a
multiplier by which a ‘‘vergence command’’ signal is used to modulate response amplitude (sensitivity slope). Output of
these 2 subpathways are summed before a second integrator (the ‘‘oculomotor integrator’’) generates the signal required to
control eye position.
A recent study by Merfeld et al. (1996) in humans obtained slightly different results. IA-torsional responses to
sinusoidal oscillations at 0.35–1.0 Hz exhibited low-pass
dynamics as in monkeys. However, response amplitudes
were smaller in the NU than in the UP orientation. The
difference was attributed to a central process that calculates
changes in gravito-inertial force explicitly and responds accordingly. However, the difference in response between the
two head orientations was small and, more importantly, was
insufficient to shift the response plane appropriately for the
different head orientations. It is unclear why the brain would
evolve an elaborate mechanism for such a small part of the
overall response. There are at least two alternative explanations. First, a change in response amplitude could result from
a static influence of otolith origin, such that IA-torsional
response amplitude is altered by head orientation. Second,
the perception of motion may differ depending on orientation, and this could induce potential changes in context that,
in turn, might modify eye movement responses at modest
frequencies, as occurs in the IA-horizontal LVOR (Paige et
al. 1996a).
Labyrinthine origin of the LVOR
LVOR responses presumably are driven by otolith inputs.
Human subjects with defective labyrinths do not have such
responses (Bronstein and Gresty 1988; Israël and Berthoz
1989; Tokita et al. 1981). Further, peripheral afferents from
squirrel monkey semicircular canals do not respond to linear
accelerations (Goldberg and Fernández 1975; Somps et al.
1994). That LVOR responses are derived from labyrinthine
input is supported further by a monkey that underwent successive labyrinthectomies (Paige et al. 1996b), thereby abolishing all LVOR and AVOR responses.
LVOR responses to IA and DV motion presumably are
mediated by separate otolith organs, specifically the utriculus
and sacculus, respectively. This is based on directional re-
/ 9k1d$$oc09 J069-7
sponse sensitivities (polarization vectors) of otolith afferents
in squirrel monkeys (Fernández and Goldberg 1976a). Linear accelerations directed along the IA head axis primarily
activate afferents that innervate hair cells in the utriculus,
whereas DV accelerations primarily stimulate those from
the sacculus. Given the similarity of IA-horizontal and DVvertical responses, it is likely that inputs from these two
end organs are processed in a similar fashion to generate
translational LVOR responses. That afferent (Fernández and
Goldberg 1976b) and LVOR response dynamics differ fundamentally signifies that dynamic central processing of otolith inputs must be performed.
Model of the LVOR
The fundamental response characteristics of the LVOR are
schematized in a model shown in Fig. 11. Its structure is deliberately simple but is sufficient to account for most attributes
of LVOR behavior reported above. Although a single otolith
input and a single ocular output is an oversimplification, the
extension to a bilateral otolith input, along with a binocular
output, as described previously (Paige and Tomko 1991b), is
straightforward. Similarly, although this model describes responses to IA motion, generalization to other motion axes requires only simple modifications. For example, DV acceleration
would stimulate saccular afferents, the inputs of which would
be processed by the DV-vertical translational LVOR pathway
but without a tilt pathway. Motion along the nasooccipital axis
would actuate both translational and tilt pathways. The tilt
pathway (effective pitch-tilt) would drive vertical eye movements, whereas the translation pathway (more complex than
that shown in Fig. 11) would drive vergence and gaze-dependent horizontal and vertical ocular responses (Paige and Tomko
1991b). Although the existence of tilt and translation pathways
in the model is supported by experimental findings, these are
not the only otolith influences on the oculomotor system (Angelaki and Hess 1996b). They are, however, the LVOR reflexes
recorded in the frequency bandwidth of this experiment.
09-15-97 14:07:53
neupa
LP-Neurophys
SQUIRREL MONKEY LINEAR VESTIBULOOCULAR REFLEX
Key features of the model in Fig. 11 are as follows. IA head
acceleration is transduced by the utriculus with different IAresponsive afferents conveying opposing signs depending on
the polarity of the hair cell populations innervated. Recent
evidence suggests that opposing responses in the cat sacculus
function in a push-pull fashion to yield a single directionally
selective signal in the vestibular nuclei (Uchino et al. 1996).
At this early stage of investigation of the LVOR, a simple
head acceleration input is used without dynamic elements. The
ocular plant is likewise simplified. Head acceleration input is
split into two functional pathways corresponding to the translational and tilt LVORs. The tilt pathway is the simpler of the
two and requires a low-pass filter and amplitude scaling (Gtilt )
to convert head acceleration into effective head roll-tilt (an
angular position signal), which is passed directly to the oculomotor system to drive torsional eye position. Because the input
is IA acceleration, actual head orientation relative to gravity is
irrelevant, as observed experimentally, and the term quasi-tilt
LVOR can be used to describe this response more accurately.
The translational LVOR pathway is more complex. Initial
stages of processing include an integration of head acceleration
and high-pass filtering. Different neuronal processes potentially
could yield the same result (Angelaki and Hess 1996a; Raphan
et al. 1996). Ultimately, however, the outcome is a high-pass
signal proportional to head velocity. The high-pass process is
necessary to account for the fact that persistent head acceleration, as occurs routinely when the head is tilted, does not
produce continuous nystagmus or erroneous perceptions of
translation. The filtered head velocity signal then is sent through
a subpathway with a gain element (G2trans ), and on to the
oculomotor system where it is integrated again (the ‘‘‘oculomotor integrator’’) and passed to the horizontal extraocular
muscles. This subpathway underlies the sensitivity intercept
observed in LVOR behavior. The filtered head velocity signal
also is passed through a different gain element (G1trans ) and
multiplied by a signal proportional to ‘‘vergence command’’.
This subpathway underlies the observed LVOR sensitivity
slope. The processed signal also is passed to the oculomotor
system through its classic integrator to drive horizontal eye
position.
An alternative structure to account for LVOR sensitivity
slope and intercept would be for the vergence command signal
to include a positive DC offset without the second pathway.
A vergence command of zero then would drop the reflex to a
nonzero value. To achieve zero output would require a binocular divergence equal to the offset. This alternative view is not
far-fetched and can be best understood by examining Figs. 5
and 8. If the vergence (x) axis of the graph were extended to
the left, imagine that the various regression lines might intersect
near a common point, corresponding to some measurable divergence angle where sensitivity reaches zero.
The model of Fig. 11 raises two important concerns. First,
what are the characteristics of the model’s dynamic elements?
The simpler tilt pathway contains a low-pass filter that may be
modeled as a one-pole element in the form, [1/(sTtilt / 1)],
where Ttilt is the time constant, and s is the LaPlace complex
frequency. The data are simulated adequately by this simple
element, as are those of Lichtenberg et al. (1982). However,
with the aid of additional preliminary data at low frequencies
(Paige et al. 1995), we estimate Ttilt to be Ç2 s. (corner frequency of 0.08 Hz), and gain, Gtilt , to be Ç0.4. Both are
/ 9k1d$$oc09 J069-7
1789
FIG . 12. Simulated (fine lines) and experimentally recorded (symbols
and lines) response sensitivities (top plots for IA-horizontal and DV-vertical
translational LVORs), tilt-gains (top plot for IA-torsional LVOR), and
phases (bottom plots) as a function of stimulus frequency. Sensitivities are
generally shown for a vergence of 1 MA (typical dark vergence in squirrel
monkeys). Note the close approximation of simulated and recorded sensitivities for both the translational and tilt LVORs. In contrast, simulations of
phase leads in the translational LVOR are only qualitatively similar to
actual values and remain generally greater in magnitude. IA-torsional phase
is shown only for model simulations, as the data were too variable in phase
to be meaningful.
substantially larger than values reported before (Lichtenberg
et al. 1982). The translation pathway contains a ‘‘leaky’’ integrator that may be expressed in the form, [Tint /(sTint / 1)],
where Tint is the time constant. This is in series with a highpass filter that may be modeled in the form, [sTtrans /(sTtrans /
1)], where Ttrans is the time constant. The combination of the
leaky integrator and high-pass filter accounts for the fact that
a simple shift in head tilt, equivalent to an acceleration step,
does not generate persistent nystagmus or perceptions of constant translation. One implication is that the translational LVOR
should undergo a 1807 phase lead as stimulus frequency shifts
from high to low. Experimental support is provided by LVOR
studies (Angelaki and Hess 1996b; Borel and Lacour 1992)
that employ frequencies less than our 0.5-Hz lower bound;
phase leads indeed undergo a roughly 1807 shift with decreasing
frequency. Empirically estimated model parameters, Tint Å 0.25
s, Ttrans Å 0.05 s, G1trans Å 0.4, and G2trans Å 0.5, approximate
LVOR sensitivity quite well (Fig. 12). However, predicted
phase leads are greater than those recorded experimentally,
indicating either dynamic nonlinearity or complexities in the
LVOR that remain unclear. These evolving issues will be explored further in on-going studies that include a broader frequency range (Paige et al. 1995).
A second and more fundamental concern is, if IA translation
stimulates both translational and tilt pathways to simultaneously
09-15-97 14:07:53
neupa
LP-Neurophys
1790
L. TELFORD, S. H. SEIDMAN, AND G. D. PAIGE
generate translational and tilt LVORs, does dynamic tilt likewise generate both responses? The answer is confounded by
the high-pass nature of the translational LVOR and by an
overwhelming AVOR response that occurs during rapid head
tilt. However, given translational LVOR dynamics as expressed
in the model, a rapid head tilt of 147, corresponding to a 0.25
g acceleration, should yield a brief ( õ1 s) response of only
2–37 at dark vergence. This could be lost easily within the
larger AVOR response during transient head roll-tilt. However,
we recently have confirmed that both horizontal and torsional
responses occur during low frequency dynamic roll tilts as
well as IA translations (Paige et al. 1995). The horizontal
component presumably reflects the IA-horizontal LVOR operating well below its physiological frequency range.
The authors thank P. Boulos, J. Cai, C. Chen, M. Gira, and K. MartinSmith for technical and clerical assistance and R. Schor for helpful discussions relevant to the model.
This research was supported by National Institutes of Health Grants DC01935, RR-06853, and T32-EY-07125 to the Center for Visual Science.
G. D. Paige also was supported by a grant from Research to Prevent Blindness.
Address for reprint requests: G. D. Paige, Dept. of Neurology, Box 605,
601 Elmwood Ave., University of Rochester, Rochester, NY 14642.
Received 24 January 1997; accepted in final form 13 June 1997.
REFERENCES
ANGELAKI, D. E. AND HESS, B.J.M. Organizational principals of otolithand semicircular canal-ocular reflexes in rhesus monkeys. Ann. NY Acad.
Sci. 781: 332–347, 1996a.
ANGELAKI, D. E. AND HESS, B.J.M. Three-dimensional organization of otolith-ocular reflexes in rhesus monkeys. I. Linear acceleration responses
during off-vertical axis rotation. J. Neurophysiol. 75: 2405–2424, 1996b.
BARR, C. C., SCHULTHEIS, L. W., AND ROBINSON, D. A. Voluntary, nonvisual control of the human vestibulo-ocular reflex. Acta Otolaryngol.
81: 365–375, 1976.
BOREL, L. AND LACOUR, M. Functional coupling of the stabilizing eye and
head reflexes during horizontal and vertical linear motion in the cat. Exp.
Brain Res. 91: 191–206, 1992.
BRONSTEIN, A. M. AND GRESTY, M. A. Short latency compensatory eye
movement responses to transient linear head acceleration: a specific function of the otolith-ocular reflex. Exp. Brain Res. 71: 406–410, 1988.
BUSETTINI, C., MILES, F. A., SCHWARZ, U., AND CARL, J. R. Human ocular
responses to translation of the observer and of the scene: dependence on
viewing distance. Exp. Brain Res. 100: 484–494, 1994.
CORREIA, M. J., PERACHIO, A. A., AND EDEN, A. R. The monkey vertical
vestibuloocular response: a frequency domain study. J. Neurophysiol.
54: 532–548, 1985.
FERNÁNDEZ, C. AND GOLDBERG, J. M. Physiology of peripheral neurons
innervating otolith organs of the squirrel monkey. I. Response to static
tilts and to long-duration centrifugal force. J. Neurophysiol. 39: 970–
984, 1976a.
FERNÁNDEZ, C. AND GOLDBERG, J. M. Physiology of peripheral neurons
innervating otolith organs of the squirrel monkey. III. Response dynamics. J. Neurophysiol. 39: 996–1008, 1976b.
GOLDBERG, J. M. AND FERNÁNDEZ, C. Responses of peripheral vestibular
neurons to angular and linear accelerations in the squirrel monkey. Acta
Otolaryngol. 80: 101–110, 1975.
GUEDRY, F. E. Psychophysics of vestibular sensation. In: Handbook of Sensory Physiology. Vestibular System, edited by H. H. Kornhuber. New
York: Springer-Verlag, 1974, vol. VI, part 2, p. 3–154.
HINE, T. AND THORN, F. Compensatory eye movements during active head
rotation for near targets: effects of imagination, rapid head oscillation
and vergence. Vision Res. 27: 1639–1657, 1987.
/ 9k1d$$oc09 J069-7
HOLLY, J. E. AND MCCOLLUM, G. The shape of self-motion perception I.
Equivalence of classification for sustained motions. Neuroscience 70:
461–486, 1996.
ISRAËL, I. AND BERTHOZ, A. Contribution of the otoliths to the calculation
of linear displacement. J. Neurophysiol. 62: 247–263, 1989.
LICHTENBERG, B. K., YOUNG, L. R., AND ARROTT, A. P. Human ocular
counterrolling induced by varying linear accelerations. Exp. Brain Res.
48: 127–136, 1982.
MAYNE, R. A systems concept of the vestibular organs. In: Handbook of
Sensory Physiology. Vestibular System, edited by H. H. Kornhuber. New
York: Springer-Verlag, 1974, vol. VI, part 2, p. 493–580.
MERFELD, D. M., TEIWES, W., CLARKE, A. H., SCHERER, H., AND YOUNG,
L. R. The dynamic contributions of the otolith organs to human ocular
torsion. Exp. Brain Res. 110: 315–321, 1996.
OAS, J. G., BALOH, R. W., DEMER, J. L., AND HONRUBIA, V. L. The effect
of target distance and stimulus frequency on horizontal eye movements
induced by linear acceleration on a parallel swing. Ann. NY Acad. Sci.
656: 874–876, 1992.
PAIGE, G. D. The influence of target distance on eye movement responses
during vertical linear motion. Exp. Brain Res. 77: 585–593, 1989.
PAIGE, G. D. Linear vestibulo-ocular reflex (LVOR) and modulation by
vergence. Acta Otolaryngol. Suppl. 481: 282–286, 1991.
PAIGE, G. D., BARNES, G. R., TELFORD, L., AND SEIDMAN, S. H. Influence
of sensorimotor context on the linear vestibulo-ocular reflex. Ann. NY
Acad. Sci. 781: 322–331, 1996a.
PAIGE, G. D., BOULOS, P., AND SEIDMAN, S. H. Eye movement responses
to low frequency tilt and translation in the squirrel monkey. Soc. Neurosci.
Abstr. 21: 138, 1995.
PAIGE, G. D., TELFORD, L., SEIDMAN, S. H., AND BOULOS, P. The linear
vestibulo-ocular reflex (LVOR) following labyrinthectomy. Soc. Neurosci. Abstr. 22: 660, 1996b.
PAIGE, G. D. AND TOMKO, D. L. Eye movement responses to linear head
motion in the squirrel monkey. I. Basic characteristics. J. Neurophysiol.
65: 1170–1182, 1991a.
PAIGE, G. D. AND TOMKO, D. L. Eye movement responses to linear head
motion in the squirrel monkey. II. Visual-vestibular interactions and kinematic considerations. J. Neurophysiol. 65: 1183–1196, 1991b.
POST, R. B. AND LEIBOWITZ, H. W. The effect of convergence on the vestibulo-ocular reflex and implications for perceived movement. Vision Res.
22: 461–465, 1982.
RAPHAN, T., WEARNE, S. L., AND COHEN, B. Modeling the organization of
the linear and angular vestibulo-ocular reflexes. Ann. NY Acad. Sci. 781:
348–363, 1996.
ROBINSON, D. A. A method of measuring eye movement using a scleral
search coil in a magnetic field. IEEE Trans. Biomed. Eng. 10: 137–145,
1963.
SCHWARZ, U. AND MILES, F. A. Ocular responses to translation and their
dependence on viewing distance. I. Motion of the observer. J. Neurophysiol. 66: 851–864, 1991.
SHELHAMER, M., MERFELD, D. M., AND MENDOZA, J. C. Effect of vergence
on the gain of the linear vestibulo-ocular reflex. Acta Otolaryngol. Suppl.
520: 72–76, 1995.
SKIPPER, J. J. AND BARNES, G. R. Eye movements induced by linear acceleration are modified by visualisation of imaginary targets. Acta Otolaryngol. Suppl. 468: 289–293, 1989.
SNYDER, L. H., LAWRENCE, D. M., AND KING, W. M. Changes in vestibuloocular reflex (VOR) anticipate changes in vergence angle in monkey.
Vision Res. 32: 569–575, 1992.
SOMPS, C. J., SCHOR, R. H., AND TOMKO, D. L. Vestibular afferent responses
to linear accelerations in the alert squirrel monkey. NASA Tech. Memo.
4581: 1–16, 1994.
TELFORD, L., SEIDMAN, S. H., AND PAIGE, G. D. Canal-otolith interactions
driving vertical and horizontal eye movements in the squirrel monkey.
Exp. Brain Res. 109: 407–418, 1996.
TOKITA, T., MIYATA, H., MASAKI, M., AND IKEDA, S. Dynamic characteristics of the otolithic oculomotor system. Ann. NY Acad. Sci. 374: 56–68,
1981.
UCHINO, Y., SATO, H., AND SUWA, H. Excitatory and inhibitory inputs from
saccular primary afferents to cat single vestibular neurons. Soc. Neurosci.
Abstr. 22: 274, 1996.
09-15-97 14:07:53
neupa
LP-Neurophys