Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Electrical ballast wikipedia , lookup
Skin effect wikipedia , lookup
Opto-isolator wikipedia , lookup
Utility frequency wikipedia , lookup
Electric motor wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Commutator (electric) wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Control theory wikipedia , lookup
Control system wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Power inverter wikipedia , lookup
PID controller wikipedia , lookup
Three-phase electric power wikipedia , lookup
Current source wikipedia , lookup
Buck converter wikipedia , lookup
Power electronics wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Induction motor wikipedia , lookup
Alternating current wikipedia , lookup
Current mirror wikipedia , lookup
Electric machine wikipedia , lookup
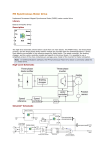
JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRONICS AND COMMUNICATION ENGINEERING DESIGNING SPACE VECTOR CURRENT CONTROLLERS FOR PMSM DRIVES 1 PROF. VINOD J. RUPAPARA. 2 PROF. M.V.MAKWANA 1 Assistant 2 Assistant Professor & P.G. Student, Power Electronics Dept, L. E. College, Morbi Professor, Power Electronics Dept, Om Shanti Engineering College, Rajkot [email protected], [email protected] ABSTRACT : AC induction motor has lower efficiency and poor performance. PM synchronous motors (PMSMs) can achieve the servo performance characteristics of dc machines. This requires the PMSM to be vector controlled with additional tight current control. An experimental evaluation of hysteresis, delta, and ramp comparison and space vector current controllers is made, or which circuits are given. Keywords—PMSM, hysteresis, delta, space vector, PSIM I. INTRODUCTION Permanent magnet ac motors have the advantage of not requiring any magnetizing current, and hence can operate at a higher power factor and efficiency than an induction motor in the fractional to 30 kW regions. Inverter-fed PM machines do not need slip rings or brushes; hence the reliability of the motor is higher than that of a wound rotor synchronous motor. The use of the permanent magnets tends to reduce the weight compared to other motors of equivalent power output. This leads to an increased torque to inertia ratio and power density [1], which make PM ac motors suitable for a variety of applications including robotics and aerospace [1] Figure 1basic block diagram of vector controlled PMSM drive. A current controlled inverter is required to provide the dc machine servo characteristics, however the different current control strategies available require investigation as their performance differs over a range of operating conditions. An analytical study of hysteresis controllers has been performed [5] While the space vector controller is described in [6]. The ramp comparison controller is modeled on a computer in [3] and the delta controller discussed in [4]. This paper uses two criteria of current controllers to evaluate them as a function of operating conditions. The inverter transistor average switching frequency and the rms current error have been chosen as readily accessible parameters by which the current controllers can be evaluated and compared. To compare the controllers with each other, the motor is run at a constant speed and the controller parameters adjusted to produce the same rms current error. Due to the complexity of the controllers, only the constant torque operating condition is considered in this paper. II. VECTOR CONTROL OF A PMSM Vector control enables ac motors to obtain performance characteristics similar to dc machines. This control technique uses the instantaneous rotor position to calculate the required stator currents which are oriented at some specified angle with respect to the rotor. Current controllers are used to force the actual current to follow the commanded current. Under usual operating conditions, the magnetic flux of the permanent magnets remains constant. Therefore by controlling only the stator currents, the magnet flux in the air gap and stator can be controlled. The rotor position is used to orientate the stator currents at any required phase angle with respect to the rotor flux, and hence with respect to the back-emf [9]. For a non-salient motor (as used in this paper), the most efficient operation occurs when the stator flux is perpendicular to the rotor flux, that is when it is in phase with the back-emf. ISSN: 0975 – 6779| NOV 11 TO OCT 12 | VOLUME – 02, ISSUE - 01 Page 246 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRONICS AND COMMUNICATION ENGINEERING III. TYPES OF CURRENT CONTROLLERS A permanent magnet synchronous machine has a sinusoidal back-emf, and hence for smooth torque generation, the stator currents must also be sinusoidal. Of the various methods of non-linear current control, the hysteresis method is one of the simplest Conceptually. It also has the advantage of a fast transient response compared to other methods such as delta or ramp comparison. In the discussion to follow, the current error is defined as: AI - I - I*, where I - actual current I* = commanded current III.I HYSTERESIS CURRENT CONTROL The hysteresis controller compares the actual phase current with the commanded, and if the magnitude of the error is greater than a preset level, the inverter leg is switched appropriately [10], although the actual current also depends on the currents in the other phases. This is shown for a single phase in figure 2. Figure 2 single phase commanded current with hysteresis band. For a given phase, the transistor that requires to be switched is dependent on both the error sign and the sign of the commanded current (I*). For a hysteresis bandwidth of h, the algorithm used for the inverter (figure 3) leg of T1/T4 and individual current control in each phase is: if I*>=O and I>(I* + h/2) then turn off T1 if I*bO and I<(I* - h/2) then turn on T1 if I*<O and I>(I* + h/2) then turn on T4 if I*<O and I<(I* - h/2) then turn off T4 This is non-complementary switching, which has been used for all the controllers. The disadvantage of the hysteresis current controller is that the switching frequency is dependent on the motor parameters, speed and dc bus voltage. Figure 3 inverter circuit III.II DELTA CURRENT CONTROL The delta controller [6] uses a fixed frequency sampling of the current with zero hysteresis bandwidth logic, as shown in figure 4, and control is only applied at those sampling times. This has the advantage of limiting the inverter switching frequency, but the disadvantage of a poorer transient response and current error when compared to the hysteresis controller. Figure 4 delta current controller III.III SPACE VECTOR CURRENT CONTROL The space vector [4] is defined as: I = 2/3(Ia+aIb+a21c), a=e(j2n/3)……………(1) The two axes used are the real axis, which is coincident with the phase a-axis, and an axis orthogonal to the a-axis. The effect is the same as vector ally adding the phases. The resultant can be used to determine the inverter gating signals, taking into account all the current errors simultaneously. The space vector current error is defined as: - AI = 1. -I*………………………………….. (2) A space vector current controller compares the space vector current error with hysteresis boundaries, as shown in figure 5, and then applies the voltage vector nearest to the current error vector. It is shown in the appendix that due to the absence of a neutral, the dependency between the phases causes the space current error vector to exceed the hysteresis boundary whenever the largest individual phase error exceeds 2/3 of the hysteresis boundary. Figure 5 space vector diagram of the current error, showing the vector hysteresis bands III. DESIGN AND IMPLEMENTATION OF THE PMSM VECTOR CURRENT CONTROLLERS III.I SPACE VECTOR CONTROLLER IMPLEMENTATION Implementing space vector control is a matter of using the standard hysteresis controller (for zero hysteresis bandwidth) with a comparator to select the ISSN: 0975 – 6779| NOV 11 TO OCT 12 | VOLUME – 02, ISSUE - 01 Page 247 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRONICS AND COMMUNICATION ENGINEERING largest error and compare it to the hysteresis bandwidth. This can then operate a latch. The circuit used is given in figure 7. The voltage drops across the diodes are taken into account by the provision of biasing voltages. Figure 6 space vector current controller The diodes are used to compare the current errors, such that the most positive error will appear at F and the most negative error at G. The negative error is inverted and is then compared to the positive error by another pair of diodes. The larger of the two is now compared to the hysteresis band. Should either of the two exceed the hysteresis band, the latch is enabled to update the inverter gating signals from three other phase current error comparators with zero hysteresis. The advantage of the space vector controller over the hysteresis is that no zero voltage vectors can be applied. IV. CURRENT CONTROLLER RESULTS To find the result of current controller, a single speed and commanded current was chosen. The controller parameters were adjusted to produce the same rms current error. The speed of the motor affects the controller characteristics due to the back-emf. The average inverter transistor switching frequency was then measured. This is relevant to inverter efficiency and also to rating the transistors adequately. The overall ability of the current controller to track the current can be described by the rms current error, which is defined 2s the rms of the difference between the actual and commanded currents IV.I SPACE VECTOR CURRENT CONTROL The commanded current was set at 1.10 A (rms), with the bandwidth set at 0.58 A. The bandwidth is defined from zero. Motor speed 1250 1500 avg. switching frequency (kHz) 0.726 3.32 2.80 5.00 IV.II CONSTANT SPEED WITH VARIABLE COMMANDED CURRENT Motor speed of 1500 rpm was chosen, which was maintained for different commanded currents by adjusting the load on the motor. The commanded current was increased in all cases from approximately 1.4 A (rms) to 4.3 A (rms). Both the hysteresis and the space vector controller showed no clear trend in the average switching frequency and the current error as a function of the commanded current, both remaining approximately constant. The delta controller shows a pronounced effect as the commanded current increases, with the-switching frequency decreasing and the current error increasing. The reason for this can be seen in figures 7 & 8. Figure 7 Commanded and actual delta controlled current with I* = 1.73 A (rms), 1490 rpm Figure 6 shows that the current often reaches zero before increasing. At larger current amplitudes (figure 7, note the change in scale), there is further for the current to fall and therefore the current error will increase. As the commanded phase current increases from 0.9 A (rms) to 4.24 A (rms), the ramp comparison controller average switching frequency decreases from 6.5 kHz to 4.5 kHz and the rms current error increases from 0.25 A to 0.33 A. rms ∆i (A) 0.486 0.652 0.609 0.750 Figure 8 Commanded and actual delta controlled current with I* = 4.28 A (rms), 1500 rpm. ISSN: 0975 – 6779| NOV 11 TO OCT 12 | VOLUME – 02, ISSUE - 01 Page 248 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRONICS AND COMMUNICATION ENGINEERING V. CONCLUSION This paper has presented the study of three different current controllers suitable for vector controlled drives. They include the hysteresis, delta and space vector controllers. An evaluation based on average switching frequency and rms current error for space vector type has also been included. The hysteresis controller has a reduced average switching frequency near the waveform peaks due to the increase in the magnitude of the back-emf, and for the same reason, as the motor speed increases, the average switching frequency over the entire waveform decreases. Negotiable effect is produced by changes in the magnitude of the commanded current waveform. The space vector controller is similar, but produces no zero voltage vectors. At a motor speed of 1500 rpm, with an rms current error of 0.49 A, the vector control controller demands the suitable switching frequency from the inverter. REFERENCES [1] M. A. Jabbar, T. S. Low and M.A. Rahman, "Permanent magnet motors for brushless operation", 1988 IAS Annual Meeting [2] P. Pillay and R. Krishnan, "Application characteristics of permanent magnet synchronous and brushless dc motors for servo drives.", 1987 IAS Annual Meeting, pp 380 - 390. [3] P. Pillay and R. Krishnan, "Modeling, simulation, and analysis of permanent-magnet motor drives, part 1: the permanent-magnet synchronous motor drive", IEEE Trans. Industry Applications, vol. 25, no. 2, March/April 1989 [4] R. D. Lorenz and D. M. Divan, "Dynamic analysis & experimental evaluation of delta modulators for field oriented ac machine current regulators", 1987 IAS Annual Meeting, [5] W. McMurray, "Modulation of the chopping frequency in DC choppers and PWM inverters having current hysteresis controllers", IEEE PESC Conference Record [6] G. Pfaff, A. Wick, "Direct current control of AC drives with pulsed frequency converters", Process Automation, 1983 [7] B. K. Bose, "A high performance inverter-fed drive system of an interior permanent magnet synchronous machine", 1987 IAS Annual Meeting, pp 269 - 276. (81 P. Freere and P. Pillay, "Systematic designs of a permanent magnet synchronous motor drive", IAS Annual Meeting, 1990. [9] R. Dhaouadi and N. Mohan, "Analysis of currentregulated voltage-source inverters for permanent magnet synchronous motor drives in normal and extended speed ranges", PES 1989 Summer Meeting, pp 1 - 8. [10] R. G. Palaniappan and J. Vithayathil, "A control strategy for reference wave adaptive current generation", IEEE trans. on Industrial Electronics and Control Instrumentation, vol., IECI-27, no.2, May 1980. [11] Shenzhen - sunfar electric technology company Ltd, PMSM drives manual ISSN: 0975 – 6779| NOV 11 TO OCT 12 | VOLUME – 02, ISSUE - 01 Page 249