Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Photon polarization wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Kinetic energy wikipedia , lookup
Heat transfer physics wikipedia , lookup
Internal energy wikipedia , lookup
Hunting oscillation wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Eigenstate thermalization hypothesis wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Classical central-force problem wikipedia , lookup
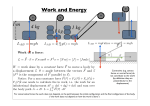
Work and Energy
1m
4 kg
LAB = mgh
1 kg
1 kg
LAB = 4( m
4 gh) = mgh
LAB = mgl sin α = mgd hd = mgh
Work of a force:
L = F� · �s = F s cos θ = F � s = [N m] = [J] = [Joule]
W = work done by a constant force F� to move a body by
a displacement �s. θ = angle between the vectors F� and �s
(F � is the component of F� parallel to �s).
� (�r) = Fx (�r)î + Fy (�r)ĵ +
Notice: For a non constance force F
Fz (�r)k̂ one needs to calculate the in work, i.e. the work for an
infinitesimal displacement d�r� = dxî + dy ĵ + dz k̂ and sum over
B �
the body path A → B: L = A F
(�r) · d�r
F� �
The contact forces (e.g.
normal force) do not
contribute to the work!
(by definition they are
perpendicular to the
displacement)
For conservative forces the work does not depends on the path between the initial configuration and the final configuration of the body.
(“the work does not depend on how the work is done”)
Work and Energy
For conservative forces the work does not depends on the path
between the initial configuration and the final configuration of the
body. (“the work does not depend on how the work is done”)
Energy: The Energy is the capacity of a body to do a
work, it is expressed in [Joule] (the variation of energy is
the work done by the force acting on the body).
Potential Energy
LAB = −(UB − UA ) = −∆U
the potential energy of a conservative force is the energy associated to
the position or to the state of a body subject to that force
LAB = mgl sin α = mgd hd = mgh
m
m
m/4
h
l
h = l sin α
α
LAB = mgh
LAB = 4( m
4 gh) = mgh
Work and Energy
Gravitational potential energy (on Earth surface)
Ug = mgh
Ug = gravitational potential energy on the Earth surface of a body on mass m
at height y = h relative to a reference position y = 0 (h � rT where rT = Earth
radius)
LAB = mgl sin α = mgd hd = mgh
m
m
m/4
l
h = l sin α
α
LAB = mgh
LAB = 4( m
4 gh) = mgh
Work and Energy
Kinetic energy
1
2
K=
mv
2
K = energy of a body m moving at velocity v (= work produce to put the body
at rest).
The total work LAB done on the body that moves from
position A to position B is equal to the variation of its
kinetic energy:
LAB = KB − KA
F� � =
Elastic potential energy
�vA
�
a�
m
�vB
1 2
kx
2
Uk = elastic potential energy of a body attached to a spring displaced of x from
the equilibrium condition; k = elastic constant of the spring.
Uk =
Interpretation of the potential energy graphic
A body subject to conservative forces moves toward the minimum of the
corresponding potential energy
U (ti ) + K(ti ) = U (t) + K(t) = U (tf ) + K(tf ) , ∀t
.
.
x(t)
Ug (ti )
Uk (ti )
K(t)
K(t)
UK (t)
Ug (t)
Equilibrium
position
.
h(t)
Principle of conservation of Mechanical Energy
In a ISOLATED system the TOTAL energy is conserved
(it is constant in time), but it may transforms from a type
of energy to the other.
For a system on which on conservative forces act
∆K + ∆Ug + ∆Uk + ∆Ualtro = 0
where: ∆K = variation of kinetic energy of the system;
∆Ug = variation of gravitational energy; ∆Uk variation of
elastic energy; ∆Uother variation of other types of conservative potential energy
The energy can not created nor distroied
For dissipative forces (e.g.: friction) the corresponding work
done depends on the particular path and it is not possible to
define a potential. In this case part of the energy of the system is
converted in “internal energy” (e.g.: Heat) of the system and it
can not be directly converted to work.
Gravitational potential energy (general case)
m1 · m2
UG = −G
r
Gravitational potential energy of a point-like particle of
mass m1 at distance r from a second point-like particle
of mass m2 (notice: by convention r → ∞ ⇒ UG → 0).
Molecular bounding energy
Power
Variation of work over time:
Pm
W
=
t
joule
[
≡ W AT T = W ]
second
Pm = mean power of a force is equal to the work done W
divided by the time t taken for doing it.
Another common unit for the Power is the HOURSEPOWER (hp):
1hp = 746W
Notice: the Kilowatt-hour (KW h) is 1kW × h = 3.6 ×
106 J = 3.6M J. It denotes an energy (work).
Metabolism
promptness of energy use in leaving beings
Moment of a force w.r.t. a point (a.k.a torque)
�τ = �r × F� → |�τ | = r · F · sin α = F · d = F ⊥ · r
[newton · metro → N · m]
[joule]
�
τ
F�
�r α
d = r sin α
τ = moment w.r.t. to the point O (fulcrum) of the
force F� applied to the point P . d = lever-arm of the force:
distance between the rect of application of F� from O. �r =
� . α = angle between �r and F�
OP
Lθ = F1⊥ d1 θ = F2⊥ d2 θ → F1⊥ d1 = F2⊥ d2 = cost
�τ1 = �τ2 = �τ = cost
�τ2
�τ1
Impulse of force
J� = F� · ∆t ,
[N · s]
J� (mean) impuls of the (constant) force F� applied to a body
for a �time interval ∆t. Total impulse for non-constant forces
t
J� = tif F� (t) · dt
m
�q = m · �v ,
[kg · ]
Momentum
s
�q = momentum of a body m and velocity �v .
J� = ∆�q the impulse J� of a force is is the variation of
momentum ∆�q of the body.
q
The second Newton’s law takes the forme F� = d�
dt .
The momentum of an isolated system (F� = 0) is conserved �q = cost.
Elastic (linear) collision between a particle and a target
The elastic collisions between particles are solved by
imposing separately the conservation of the energy and of
the momentum between the conditions of the system before
and after the collision.
m1 v1 = m1 v1� + m2 v2� ,
v1� =
1
1
1
m1 v12 = m1 v1�2 + m2 v2�2
2
2
2
(m1 − m2 )v1
,
m1 + m2
v2� =
before
after
2m1 v1
m1 + m2
Completely inelastic (linear) collision (lineare) with target
In the inelastic collision the particle and target have
the same final velocity. Part of the energy is dissipated
(e.g.: heat). The collision is solved by determining a single
unknown variable by means of the conservation of the total
momentum
m1 v1 = m1 vf� + m2 vf� → vf� =
m1 v 1
m1 + m2
Mechanics of systems of particles
Centre of mass
�rcm =
�N
i
�N
i
.
�rcm
mi�ri
Mtot
cm
�N
mi xi
m1 x1 + m2 x2 + · · · + mN xN
xcm = �i N
=
Mtot
i mi
�N
mi yi
m1 y1 + m2 y2 + · · · + mN yN
ycm = �i N
=
Mtot
i mi
�N
mi zi
m1 z1 + m2 z2 + · · · + mN zN
zcm = �i N
=
Mtot
i mi
The coordinates of the centre of mass {xcm , ycm , zcm }
are given by the mean value of the positions {xi , yi , zi } of
the particles
�N i = 1, 2, ·, N weighted by their masses mi .
Mtot = i mi : total mass of the system of particles.
the gravitational force produces a moment with respect
to the centre of mass (a.k.a centre of gravity or equilibrium
point).
Centre of Mass
M · �acm = F�ext
M = total (constant) mass of the system; �acm = acceleration of the centre of mass; F�ext = resulting of the external
forces of the system.
� = M · �vcm
Q
� = �q1 + �q2 + · · · + �qN = total momentum of the system;
Q
�vcm = velocity of the centre of mass.
Condition of equilibrium
A rigid body at rest is in equilibrium if the sum of the
external forces acting of the body is zero and the sum of
the moment of the forces is zero as well
FT ot = 0 → v = 0
τT ot = 0 → ω = 0
Angular momentum
|�l| = r sin θ · q ,
[Kg · m2 /s]
�l
�q
�r
�l the angular momentum with respect to a point O of a
particle P of momentum q = m�v and angle θ w.r.t. �r = P�O;
Moment of inertia of a system of particles w.r.t. an axis
I=
N
�
2 Is the analogous for the rotational motion
mi ri of the inertial mass for the linear motion
(but it depends on the geometry)
i=1
Angular momentum: l = I · w, ( Q = M · v)
Moment, a.k.a torque: τ = I · α, ( F = M · a)
Work (rotational): W = τ · ∆θ, ( W = F · ∆x)
Kinetic energy (rotational): K = 12 Iω 2 , ( K = 12 M v 2 )
θ → angle expressed in RAD; ω = dθ
dt → angular velocity; a = dω
dt → angular acceleration.
θ
Moment of inertia of a system of particles w.r.t. an axis
I=
N
�
i=1
mi ri2
Is the analogous for the rotational motion
of the inertial mass for the linear motion
(but it depends on the geometry)
Angular momentum: l = I · w, ( Q = M · v)
Moment, a.k.a torque: τ = I · α, ( F = M · a)
Work (rotational): W = τ · ∆θ, ( W = F · ∆x)
Kinetic energy (rotational): K = 12 Iω 2 , ( K = 12 M v 2 )
θ → angle expressed in RAD; ω = dθ
dt → angular velocity; a = dω
dt → angular acceleration.
Mechanical properties of solid bodies
In solid bodies the elastic laws (e.g. Hooke’s law) are valid within a finite
range of forces (elasticity limit). Above this range the deformation become
permanent
An ideal elastic body is described by the Hooke’s law
F = kx
where F is the force acting on the body (F = −kx is the
reaction of the body), k is the elastic constant and x is the
deformation.
Longitudinal and transversal elasticity
1 F
σ F
Li , ∆R = − Ri
E A
E A
∆L variation of length resulting from a traction (or compression); ∆L variation of transversal direction resulting
from a traction (or compression); F force of longitudinal
traction (F > 0) or compression (F < 0); E = [N/m2 ]
Young’s parameter (it depends on the material); σ Poisson’s
parameter (it depends on the material); Li initial length of
the bar; Ri initial transversal dimension of the bar.
Ri
∆L =
Li
F
∆R
F
Shear force
1F
tan α =
γA
α angle of deformation; γ[N/m2 ] rigidity parameter (it depends on the material); F tangent force acting on the material; A area of the surface; F
A shear force
∆L
α