Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Power factor wikipedia , lookup
Audio power wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Power over Ethernet wikipedia , lookup
Control theory wikipedia , lookup
Electrical substation wikipedia , lookup
History of electric power transmission wikipedia , lookup
Electric machine wikipedia , lookup
Control system wikipedia , lookup
Voltage optimisation wikipedia , lookup
Electric power system wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Electrification wikipedia , lookup
Mains electricity wikipedia , lookup
Alternating current wikipedia , lookup
Rectiverter wikipedia , lookup
Distributed generation wikipedia , lookup
Life-cycle greenhouse-gas emissions of energy sources wikipedia , lookup
Power engineering wikipedia , lookup
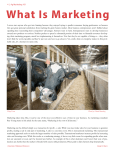
IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 17, NO. 2, JUNE 2002 279 Automatic Generation Control of a Wind Farm With Variable Speed Wind Turbines José Luis Rodríguez-Amenedo, Member, IEEE, Santiago Arnalte, and Juan Carlos Burgos, Member, IEEE Abstract—Wind farms are considered to be negative loads from the point of view of a utility manager. Modern variable-speed wind turbines offer the possibility for controlling active and reactive power separately. This paper presents a new integrated control system of a wind farm according to the utility manager requirements. This control system is based on two control levels: A supervisory system controls active and reactive power of the whole wind farm by sending out set points to all wind turbines, and a machine control system ensures that set points at the wind turbine level are reached. The system has been validated by numerical simulation using data from a wind farm with 37 variable-speed wind turbine situated in the North of Spain. An automatic generation control of these characteristics promises improved performance of the system and a better grid integration of the wind energy without significant extra costs. Index Terms—Reactive power control, variable speed drives, wind power generation. I. INTRODUCTION S PAIN is the third country on the world to utilize wind power, just after Germany and the United States [1]. Prospects for 2010 point to 8000-MW installed power from wind energy, which will represent a significant percentage of the total capacity in the Spanish electrical system. Nevertheless, in spite of this large installed wind power, reduced effort has been made to appropriately control these energy production systems. Most of actual wind farms in Spain are made up of several wind turbines installed in one site operating almost independently of each other. Newer wind turbines are variable-speed units that use power electronic converters, which allow decoupled control of torque and power factor of the generator [2]. This technology can be used to support wind farm integration in the electrical system. More than 50% of all wind turbines installed in Spain use this advanced technology. Most of them include doubly fed induction generators. The aim of this paper is to present a new integrated control system of the total active and reactive power generated by the wind farm. The control system reduces the number of wind turbine shutdowns produced by over/under voltage variations beyond limits and thus increases the number of operation hours. Besides that, reactive power control makes it possible to hold unit power factor at the point where the reactive meter is located or even to produce reactive power, which allows the wind farm owner not to be penalized for reactive power consumption. Manuscript received March 16, 2001; revised December 5, 2001. The authors are with the Electrical Engineering Department, Carlos III University, Leganés, Madrid, Spain. Publisher Item Identifier S 0885-8969(02)05417-7. Fig. 1. Yerga wind farm layout. II. WIND FARM DESCRIPTION Yerga Wind Farm is located at La Rioja, Spain. It is made up of 37 G47/660 variable-speed wind turbines, which use a doubly fed induction generator, with a total rated power of 24.42 MW. Fig. 1 shows the electrical layout of the wind turbines distributed on four underground medium-voltage (MV) circuits at 20 kV. MV circuits meet at Yerga substation (ST). Voltage is boosted up to 66 kV (HV) by means a step-up transformer 35 MVA, 66/20 kV. ST connects the wind farm with the point of common coupling (PCC), which is located at Quel substation through a 16.38-Km long feeder. Main parameters of the wind farm are given in the Appendix. III. GENERATOR CONTROL Fig. 2 shows the main components of the variable-speed pitch-controlled G47/660 wind turbine used at Yerga wind farm. The electrical system consists of a doubly fed induction generator (DFIG), whose stator winding is directly connected to the secondary of a three winding transformer. Rotor winding 0885-8969/02$17.00 © 2002 IEEE 280 IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 17, NO. 2, JUNE 2002 Fig. 2. G47/660 wind turbine. is connected at the tertiary of the transformer through a bidirectional frequency converter made up of two back-to-back IGBT bridges (which are referred to as the supply-side and rotor-side converters). The rotor-side converter (RSC) controls rotor current in the stator flux frame reference [3]. Direct and quadrature current components allow decoupled control of torque and reactive power. Direct rotor current can be used in the same way as field current in a synchronous generator. Quadrature rotor current is used to control the generator torque to achieve the desired rotational speed in the variable-speed system. The supply side converter (SSC) is current controlled to deliver rotor power to the grid at supersynchronous speed (or to draw rotor power from the grid at subsynchronous speed). Vector control of SSC also allows reactive power compensation. Harmonic distortion of grid-injected currents is maintained into admissible limits by means of a suitable PWM technique and the three-phase choke linking SSC and tertiary transformer winding. IV. WIND TURBINE CONTROL SYSTEM The control system consists of two separated control loops: one for machine active power control (MAPC) and the other for reactive power control (MRPC). The control objectives of the active power control system without grid operator command reference are based on the following strategies for a variable-speed wind turbine with variable pitch. — Power optimization below rated wind speed: The energy capture is maximized by making the turbine work at maximum power coefficient [4]. The pitch angle is kept constant at its optimal value, whereas the tip speed ratio is driven to its optimal value by varying the rotational speed . Reference rotational speed is assured by a speed controller (SC) acting on the generator torque. — Power limitation above rated wind speed: The power controller has to assure rated output of the wind turbine by acting on the pitch angle. The speed controller keeps rotational speed constant at its rated value. When considering a better integration into the grid, the wind turbine can no longer be considered a negative load, but some kind of power control has to be achieved [5]. Under this new assumption, another control objective is considered. — Power limitation below rated wind speed: The power controller assures reference power is achieved by acting on the pitch angle. The block diagram of the proposed control system is shown in Fig. 3. The control system consists of two control loops: — a speed control loop, which controls generator speed by acting on the generator torque; — a power control loop, which controls wind turbine output by acting on the pitch angle. When no power reference is given from the supervisory control system, power reference is set up at its rated value. Bellow rated wind speed, a negative power error is achieved, and the controller output (reference pitch angle ) decreases until the controller reaches its lower saturation (optimal pitch). Therefore, the turbine works at the optimal pitch. On the other hand, the optimal speed is obtained as a reference for the speed controller from the characteristic that represents the wind turbine output as a function of the optimal speed: the so-called maximum power tracking strategy (MPT). This characteristic is truncated at rated speed; therefore, no speed reference over rated speed is provided. Above rated wind speed, a positive power error is achieved, and the pitch angle is driven to positive values until rated power is achieved. On the other hand, for this level of power, rated rotational speed reference is obtained, and the speed controller assures this reference over this range of operation. Note that in steady state, as the power controller assures rated output, and the speed controller assures rated speed; the generator torque is also rated. When a power reference is given from the supervisory control system, there could be two situations. First, wind velocity is high enough. Then, the power controller will drive the blade pitch angle to the adequate value, but on the other hand, a rotational speed reference is given to the speed controller that it is not optimal (in fact, smaller than optimal). Therefore, tip speed ratio is smaller than optimal and power coefficient results that are also decreased by this variable, i.e., the speed control loop helps the pitch drive to reduce power resulting in a less demanding action on this system. If wind is not high enough, the power controller will reach saturation at optimal pitch angle, and an optimal rotational speed reference will be provided to the speed controller, obtaining maximum power for such wind speed. The reactive power control system is based on a reactive power controller and a subordinated voltage control loop. The subordinated control loop assures that the voltage limits are not violated when trying to reach the reactive power reference. The principle of the reactive power control is as follows. First, a RODRÍGUEZ-AMENEDO et al.: AUTOMATIC GENERATION CONTROL OF A WIND FARM Fig. 3. 281 Control system block diagram. reactive power reference is set up by a supervisory control system. The reactive power controller computes the reactive . In the power error and sets up a voltage level reference following, the machine voltage controller (MVC) will compute the voltage error and set up an excitation current reference for the machine excitation current controller. The reactive power reference cannot be reached when the controller reaches saturation at the maximum or minimum voltage limit. In such a case, the control system will control the voltage level so that the limit is not violated, assuring the availability of each individual machine, i.e., the control system prevents the voltage protection to shoot and disconnect the machine. V. SUPERVISORY CONTROL SYSTEM The purpose of supervisory control system is to control the active and reactive power injected by the whole wind farm into and ). The system consists of two control the grid ( loops for active and reactive power control respectively. The active control loop is based on a wind farm active power controller WFAPC. Under grid operation, the controller will refrom the grid operator. The conceive a power reference troller then computes the active power error and sets up a power for each machine active power controller. reference Note that if power reference is increased when one or more machines are working at maximum power, the rest of the machines will automatically assume the load, as the active power controller will increase computed reference power due to the power error. The reactive control loop is based on a wind farm reactive power controller (WFRPC) and a subordinated voltage control loop. The subordinated control loop assures that the voltage Fig. 4. Electrical generator model. limits are not violated when trying to reach the reactive power reference. The principle of the reactive power control is as follows. First, a reactive power reference is set up, and usually, unity power factor is desired. The reactive power controller computes the reactive power error and sets up a voltage level at the wind farm substation. In the following, reference the wind farm voltage controller (WFVC) will compute the for voltage error and set up a reactive power reference each machine-reactive power controller. The reactive power reference cannot be reached when the controller reaches saturation at the maximum or minimum voltage limit. In such a case, the control system will control the voltage level so that the limit is not violated, assuring the availability of the wind farm, i.e., the control system prevents the voltage protection to shoot and disconnect the wind farm. VI. SIMULATION PROCESS In order to validate the proposed control systems, a simulation process has been carried out. Each simulation starts at a steady-state where a wind velocity, voltage level at the PCC, 282 IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 17, NO. 2, JUNE 2002 Fig. 7. Case 1: Active and reactive power delivered. Fig. 5. Wind farm electrical network. Fig. 6. Wind speed at wind turbines number 3, 9, 19, and 33. and desired wind farm active and reactive power are given. From these inputs, each machine voltage, active power, and reactive power is obtained. The dynamic simulation starts when one or more inputs change. The simulation process is as follows. 1) The dynamic model of the supervisory control system will produce a change in the active and reactive power references of each machine control system. 2) For each machine, the dynamic model of the machine control system will produce a change in the current references of the electrical generator current control loops and/or a change in the blade pitch control system. 3) The dynamic model of the drive train will provide each machine rotational speed. For this purpose, turbine and generator torque first have to be evaluated. A simple static nonlinear turbine model is considered. The model computes turbine torque considering wind velocity, rotational speed, and blade pitch as inputs. The generator torque reference provided by the speed control loop is taken as the actual generator torque, i.e., no dynamic is considered as the generator torque control loop is much faster than any of the considered dynamic models. 4) If each generator torque and speed is known, the static model of the Fig. 4 is used to compute the current injected by each generator . The model uses as inputs the stator , the current injected by the grid-side power voltage converter , and the rotor current . First, rotor current is obtained from the current control loops. Note that these control loops provide rotor current components in a reference frame aligned along the stator flux ( – components) so that rotor current vector has to be projected on a reference frame aligned along the stator voltage. Next, stator current and rotor voltage are calculated. Then, rotor active power can be obtained, and taking into account that the grid-side power converter objective is to transfer the rotor power to the grid, the current injected by the power converter can be obtained. Note that under vector control, this power converter can transfer active power to the grid with a desired power factor. Here, unity power factor is taken. Finally, the total current injected into the grid is obtained. 5) If the voltage at the PCC and each generator current is known (see Fig. 5), the voltages at each machine terminals and the current injected at the PCC are calculated considering the wind farm network admittance matrix. From here, each machine and the wind farm active and reactive power can be obtained, providing the feedback to the dynamic models of the control systems. The process is repeated each time step. The simulation uses a variable step size with a maximum of 0.1 s. A new wind speed is read from the input file when the simulation time step corresponds to the step of the wind data. Different wind data are used for each WASP-programmed machine that uses a single anemometer measure processed to consider the wake effect and turbulence intensity in each machine, taking into account topography data of the wind farm and layout of machines. VII. SIMULATION RESULTS Three different cases have been run. Fig. 6 shows the wind velocity used in the all the cases (only wind in four turbines is shown). In the first case, the reactive power reference is set at zero, whereas the active power shows that the system achieves the three control objectives for machine active power control. RODRÍGUEZ-AMENEDO et al.: AUTOMATIC GENERATION CONTROL OF A WIND FARM Fig. 8. Case 1: Rotational speed at wind turbines number 3, 9, 19, and 33. 283 Fig. 10. Case 1: Maximum and minimum voltage at buses 1 to 37. Fig. 9. Case 1: Pitch angle at wind turbines number 3, 9, 19, and 33. In Figs. 7–9 from 0 to 400 s, no external active power reference has been specified. Then, below-rated wind speed 14 m/s energy capture is maximized through speed variation. Above-rated wind velocity, rotational speed, and power are limited to rated values through pitch variation. From 400 s, 12.5-MW wind farm power reference has been specified, and Fig. 7 shows that specified reference is achieved. Finally, Fig. 10 shows the voltage profile at each turbine during simulation by indicating maximum and minimum rms voltage values. The second case is the same as before, except that a reactive power step is applied at 200 s. Fig. 11 shows that the commanded reactive power is achieved by even share among machines. As a result, Fig. 12 shows the voltages at the wind farm substation and in four of the machines. The last case is the same as the first one, but a high PCC voltage (1.12 p.u.) is considered. Therefore, each machine supplies a different reactive power (see Fig. 13), and wind farm recannot be achieved. As a conactive power reference sequence, the upper limit in the machine voltages (1.09 p.u.) is reached; see Fig. 14. Nevertheless, voltages (in the wind farm substation and in each machine) can be controlled, and none of the machines is disconnected. VIII. CONCLUSIONS An automatic generation control system for wind farms has been designed and tested by simulation. Real data from a Spanish wind farm has been used. The proposed system is Fig. 11. Case 2: Active and reactive power delivered. Fig. 12. Case 2: Voltages at HV bus and at buses number 3, 9, 19, and 33. based on a hierarchical architecture with a supervisory control system controlling the active and reactive power at the wind farm substation and a machine control system controlling the active and reactive power at each particular wind turbine. The active power control loop allows either following a power reference or maximizing energy capture when no reference is supplied. The reactive power control loop makes possible voltage control and then achieves a high availability of wind turbines. Simulation results show good performance of the control system during a highly variable wind, large electrical disturbance and commanded active and reactive power steps. 284 IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 17, NO. 2, JUNE 2002 Wind Turbine Rotor diameter Mechanical time constant Pitch system time constant Speed range m s s r/min. Electrical system (Fig. 4) Stator rated power 660 kVA m , m , m , m , Power factor range 0.,94 lead and lag at full load Feeder Fig. 13. Length Impedance Shunt admittance Short circuit power at PCC Case 3: Active and reactive power delivered. Km Km S/Km MVA. ACKNOWLEDGMENT The authors would like to thank E. de la Rioja S.A. (Yerga’s wind farm owner) and I. Ingeniería Consultoría S.A. for data provided. REFERENCES Fig. 14. [1] Papoutsis et al., “Wind energy. The facts,” Eur. Wind Energy Assoc., ISBN92-828-4571-0. [2] Z. Chen and E. Spooner, “Grid interface options for variable-speed, permanent magnet generators,” Proc. Inst. Elect. Eng. Elect. Power Appl., vol. 145, no. 4, July 1998. [3] R. Pena, J. C. Clare, and G. M. Asher, “Doubly fed induction generator using back to back PWM converters and its application to variable-speed wind energy generation,” Proc. Inst. Elect. Eng. Elect. Power Appl., vol. 143, no. 3, May 1996. [4] S. Heier, Grid Integration of Wind Energy Conversion Systems. Chichester, U.K.: Wiley, 1998. [5] E. N. Hinrichsen, “Controls for variable pitch wind turbine generators,” IEEE Trans. Power App. Syst., vol. PAS-103, Apr. 1984. Case 3: Voltages at HV bus and at buses number 3, 9, 19, and 33. APPENDIX LV/MV transformers: 775 kVA, 20 kV/690-300 V, % MV/HV transformer: 35 MVA, 66 kV/20 kV, Underground cable % Type Section mm Km Km F/Km At circuit 1 and 2 underground cables are type 1. Circuit 3: from ST to WT14 cables are type 3 from WT14 to WT17 cables are type 2 from WT17 to WT26 cables are type 1 Circuit 4: from ST to WT27 cables are type 3 from WT27 to WT29 cables are type 2 from WT29 to WT37 cables are type 1 Mean distance between wind turbines in the wind farm is 102 m. José Luis Rodríguez-Amenedo (M’01) received the B.S. degree in energy engineering from the Universidad Politécnica de Madrid, madrid, Spain, in 1993 and the Ph.D. degree in electrical engineering from Universidad Carlos III de Madrid in 2000. His current interests are control drives and wind energy systems. He is now Assistant Professor at Universidad Carlos III de Madrid. Santiago Arnalte received the B.S. and Ph.D. degrees in electrical engineering from Universidad Politécnica de Madrid, Madrid, Spain, in 1989 and 1993, respectively. His current interests are control drives and wind energy systems. He is now an Associate Professor at Universidad Carlos III de Madrid. Juan Carlos Burgos (M’01) received the B. S. and Ph.D. degrees in electrical engineering from Universidad Politécnica de Madrid, Madrid, Spain, in 1981 and 1987, respectively. His current interests are control drives and wind energy systems. He is now an Associate Professor at Universidad Carlos III de Madrid.