Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Chapter 10
The Muscular System
J.F. Thompson, Ph.D. & J.R. Schiller, Ph.D. & G. Pitts, Ph.D.
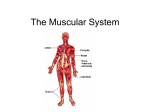
The Muscular System
Interactions of Skeletal Muscles in the Body
• Muscles usually work in groups, i.e. perform
“group actions”
• Muscles are usually arranged in antagonistic pairs
– flexor-extensor
– abductor-adductor, etc.
How Skeletal Muscles Produce
Movement
• Muscles exert force on tendons
that pull on bones
• Muscles usually span a joint
• Muscle contraction changes the
angle or position of one bone
relative to another
Brachialis
flexes forearm
How Skeletal Muscles Produce
Movement
• Origin: the attachment of
the muscle to the bone
that remains stationary
origin
• Insertion: the attachment
of the muscle to the bone
that moves
belly
• Belly: the fleshy part of
the muscle between the
tendons of origin and/or
insertion
insertion
Interactions of Skeletal Muscles in
the Body
• Prime Mover
(agonist): the
principle muscle that
causes a movement
– ex: biceps brachii,
flexion of forearm
• Antagonist: the
principle muscle that
causes the opposite
movement
– ex: triceps brachii,
extension of forearm
Interactions of Skeletal Muscles in
the Body
• Synergists: muscles that assist the prime mover
– ex: extensor carpi (wrist) muscles are synergists for
the flexor digitorum muscles when you clench your
fist
• Fixators: synergists that stabilize the origin of a
prime over
– ex: several back muscles that stabilize scapula when
the deltoid flexes the arm
Functional Roles of Skeletal Muscles
• Group actions: most movements need several
muscles working together
While the prime mover (agonist) and synergists are
contracting to provide the desired movement
• other muscles (antagonists) are relaxing & being stretched out
passively
• agonist and antagonist change roles depending on the action
• e.g., abduction versus adduction
• Synergists and fixators become agonists and
antagonists in different movements
Naming Skeletal Muscles
•
•
•
•
•
•
•
Location of the muscle
Shape of the muscle
Relative Size of the muscle
Direction/Orientation of the muscle fibers/cells
Number of Origins
Location of the Attachments
Action of the muscle
Know the muscle names as described in Lab Guide 6!
Muscles Named by Location
• Epicranius (around
cranium)
• Tibialis anterior
(front of tibia)
tibialis
anterior
Naming Skeletal Muscles by Shape
• Deltoid (triangle)
Trapezius
• Trapezius (trapezoid, 2
Deltoid
parallel sides)
• Serratus (saw-toothed)
• Rhomboideus
(rhomboid, 4 parallel
sides)
• Orbicularis and
sphincters (circular) Serratus anterior
Rhomboideus
major
Muscles Named by Size
• Maximus (largest)
• Minimis (smallest)
• Longus (longest)
• Brevis (short)
• Major (large)
• Minor (small)
Psoas
minor
Psoas
major
Muscles Named by Direction of Fibers
• Rectus
(straight)parallel to long
axis
Rectus
abdominis
• Transverse
• Oblique
External
oblique
Muscles Named for Number of
Origins
• Biceps (2)
• Triceps (3)
• Quadriceps (4)
Biceps
brachii
Muscles Named for Origin and
Insertion
Sternocleidomastoid
originates from sternum
and clavicle and inserts
on mastoid process of
temporal bone
insertion
origins
Muscles Named for Action
• Flexor carpi radialis (extensor
carpi radialis) –flexes wrist
• Abductor pollicis brevis
(adductor pollicis) –flexes
thumb
• Abductor magnus – abducts
thigh
• Extensor digitorum – extends
fingers
Adductor
magnus
Arrangement of Fascicles
• Parallel (straplike), ex: sartorius
• Fusiform (spindle
shaped), ex: biceps
femoris
Arrangement of Fascicles
• Pennate ("feather
shaped"), ex:
extensor digitorum
longus
• Bipennate, ex:
rectus femoris
• Multipennate, ex:
deltoid
Arrangement of Fascicles
• Convergent, ex:
pectoralis major
• Circular
(sphincters), ex:
orbicularis oris
Arrangement of Fascicles
• Range of motion:
depends on length of
muscle fibers (fascicles);
long fibers = large range
of motion
– parallel and fusiform
muscles
• Power: depends on total
number of muscle fibers;
many fibers = great
power
– convergent, pennate,
bipennate, multipennate
Lever Systems and Leverage
• Lever: i.e. bones, a rigid rod that moves on
some fixed point
• Fulcrum: i.e. joint, a fixed point
• Resistance:
– the force that opposes movement
– the load or object (bone or tissue) to be moved
• Effort:
– the force exerted to achieve a movement
– the effort is provided by muscle(s)
• Motion is produced when the effort exceeds
the resistance (isotonic contraction)
Lever Systems and Leverage
• Leverage: the mechanical advantage gained by a
lever
• Power: muscle tension (effort) farther from joint
(fulcrum) produces stronger contraction (opposes
greater resistance)
• Range of motion (ROM): muscle tension
(effort) closer to joint (fulcrum) produces greater
range of motion.
Mechanical Advantage
•
•
•
•
Load is near fulcrum, effort is far away
Only a small effort is required to move an object
Allows a heavy object to be moved with a small effort
Example: car jack
Mechanical Disadvantage
• Load is far from the fulcrum, effort is near the
fulcrum
– a large effort is required to move the object
– allows object to be moved rapidly, a “speed lever”
– throwing a baseball
Lever Systems and Leverage
• First-class lever: (EFR) Effort-Fulcrum-Resistance
Leverage Systems and Leverage
• Second class lever: (FRE) Fulcrum-Resistance-Effort
Leverage Systems and Leverage
• Third-class lever: (FER) Fulcrum-Effort-Resistance
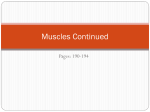
Skeletal Muscles
Know the muscles, their
origins and insertions as
described in your Lab Guide 6.
Additional Information
• You do not need to memorize the details
of the different leverage system types for
Exam 3.
• Slides with some examples of the naming
of muscles can be found in the
PowerPoint presentation for Lab 6.
End Chapter 10