Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Stepper motor wikipedia , lookup
Spectral density wikipedia , lookup
Mains electricity wikipedia , lookup
Skin effect wikipedia , lookup
Electric machine wikipedia , lookup
Utility frequency wikipedia , lookup
Control system wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Ground loop (electricity) wikipedia , lookup
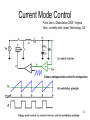
Electrical ballast wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Power electronics wikipedia , lookup
Current source wikipedia , lookup
Alternating current wikipedia , lookup
Current mirror wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Current Model Buck Converter Example LM3495 LM5576 LT3713 All materials are from National Semiconductor website available to any readers, Linear Technology data sheet. 1 Current Mode Buck Converter • LM3075 from National Semiconductor • The LM3075 is a current mode control, synchronous buck controller IC. • Current mode control assures excellent line and load regulation and a wide loop bandwidth for fast response to load transients. • Other features – cycle by cycle current limit, 1.24V2% reference • Application area: automotive power supplies and distributed power systems 2 • Current mode control can be achieved by either sensing across the high side NFET or a sense resistor. • The switching frequency can be selected as either 200kHz or 300kHz from an internal clock. 3 Current Mode Problems Susceptibility to noise on the current signal is a very common problem, reducing the ability to process small ontimes (large step-down ratios). As the duty cycle approaches 50% current mode control exhibits sub-harmonic oscillations. A fixed slope ramp signal (slope compensation) is generally added to the current ramp signal. For large step-down applications with a large Vin and much smaller Vout, this minimum on-time can present a problem. measuring current during a very short time. 4 Current Mode Problems Step down switching regulators designed for high input voltages must control very short minimum on-times to operate at high frequencies. The maximum switching frequency and size of the inductor and output capacitor are function of the minimum on-time. The on-time of conventional current mode controllers is limited by current measurement delays and the leading edge spike on the current sense signal. 5 When the Buck FET turns on and the diode turns off, a large reverse recovery current flows, this current can trip the PWM comparator. Additional filtering and/or leading edge blanking is necessary to prevent premature tripping of the PWM. The emulated current signal is free of noise and turnon spikes. Emulated Current Mode 6 Conventional Current Mode 7 8 The buck switch current signal we can note that the signal can be broken down into two parts, a pedestal and a ramp. When the buck switch initially turns on the current level jumps to the same level that was conducting previously in the diode. By taking a sample-and-hold measurement of the diode current just before turning on the buck switch we can establish the pedestal level. A small current sense resistor is placed in series with the diode anode to accomplish this measurement. 9 10 orange color: conventional current mode blue color: emulated current mode 11 Current Mode Control From Jian Li Dissertation 2009, Virginia Tech, currently with Linear Technology, CA Show a voltage-mode control for comparison 12 13 constant frequency constant frequency variable frequency variable frequency 14 variable frequency 15 16 17 18 V2 Control Architecture 1. Using the equivalent series resistor (ESR) of the output capacitors as the current sensing resistor 2. Output voltage is used to generate both the error signal and ramp signal 3. Load current information, detected on the voltage of the ESR, is directly fed back to the PWM modulator through inner loop without going through any low pass filter or compensation network, so that fast transient response can be achieved. 19 From Saurabh Kasat’s MS thesis Okalahoma State University, December 2004 20